ResNet
2024年5月7日更新
在此教程中,我们将对ResNet模型及其原理进行一个简单的介绍,并实现ResNet模型的训练和推理,目前支持数据集有:MNIST、fashionMNIST、CIFAR10等,并给用户提供一个详细的帮助文档。
目录
基本介绍
- ResNet描述
- 为什么要引入ResNet?
- 网络结构分析
ResNet实现
- 总体概述
- 项目地址
- 项目结构
- 训练及推理步骤
- 实例
基本介绍
ResNet描述
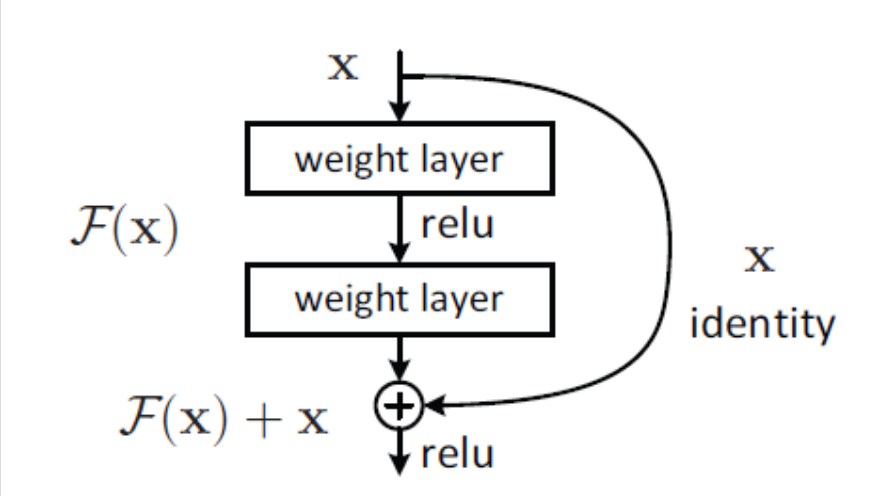
ResNet是一种残差网络,咱们可以把它理解为一个子网络,这个子网络经过堆叠可以构成一个很深的网络。下面是一个简单的ResNet结构:
为什么要引入ResNet?
通过前面的学习我们知道,网络越深,咱们能获取的信息越多,而且特征也越丰富。但是根据实验表明,随着网络的加深,优化效果反而越差,测试数据和训练数据的准确率反而降低了,这是由于网络的加深会造成梯度爆炸和梯度消失的问题。如下图所示:
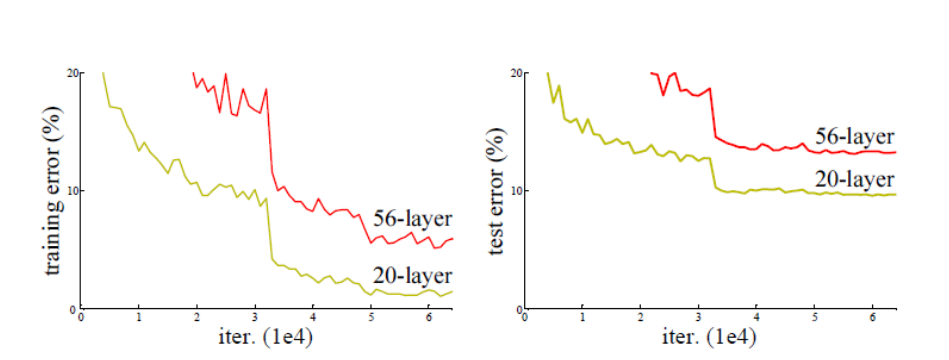
为了让更深的网络也能训练出好的效果,一个新的网络结构——ResNet出现了。
网络结构分析
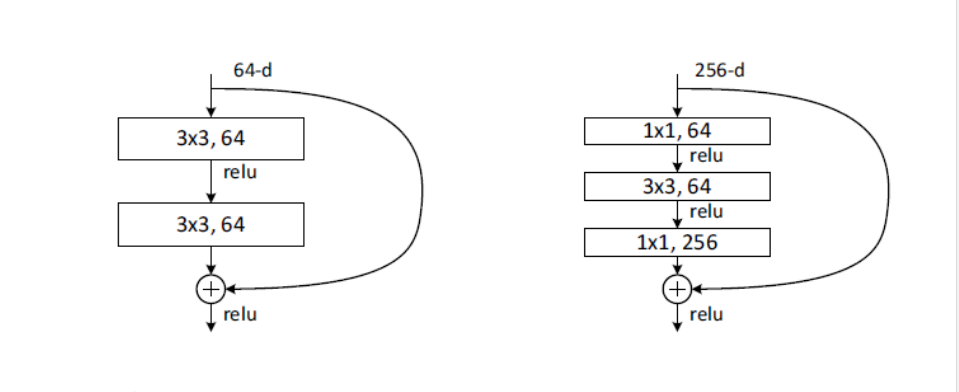
ResNet block有两种,一种两层结构,一种三层结构,如下图所示:
现在要求解的映射为:H(x),将这个问题转换为求解网络的残差映射函数,也就是F(x),其中F(x) = H(x)-x。
残差:观测值与估计值之间的差。
这里H(x)就是观测值,x就是估计值(也就是上一层ResNet输出的特征映射)。
一般称x为identity Function,它是一个跳跃连接;称F(x)为ResNet Function。于是要求解的问题变成了H(x) = F(x)+x。
关于为什么要经过F(x)之后再求解H(x),相信很多人会有疑问。如果是采用一般的卷积神经网络的化,原先要求解的是H(x) = F(x)这个值,那么现在假设,在网络中达到某一个深度时已经达到最优状态了,也就是说,此时的错误率是最低的时候,再往下加深网络的化就会出现退化问题(即错误率上升)。现在要更新下一层网络的权值就会变得很麻烦,因为权值得是一个让下一层网络同样也是最优状态才行。
但是采用残差网络就能很好的解决这个问题。仍然假设当前网络的深度能够使得错误率最低,如果继续增加ResNet,为了保证下一层的网络状态仍然是最优状态,只需要令F(x)=0就可以。因为x是当前输出的最优解,为了让它成为下一层的最优解也就是输出H(x)=x的话,只要让F(x)=0就行了。
当然上面提到的只是理想情况,在真实测试的时候x肯定是很难达到最优的,但是总会有那么一个时刻它能够无限接近最优解。这时采用ResNet的话,也只用小小的更新F(x)部分的权重值就行了,而不用像一般的卷积层一样大动干戈。
注意:如果残差映射(F(x))的结果的维度与跳跃连接(x)的维度不同,就没有办法对它们两个进行相加操作的,必须对x进行升维操作,让他俩的维度相同时才能计算。
升维的方法有两种:
- 全0填充
- 采用1*1卷积ResNet实现
总体概述
本项目旨在实现ResNet模型,并且支持多种数据集,目前该模型可以支持单通道的数据集,如:MNIST、KMNIST、FashionMNIST数据集,也可以支持多通道的数据集,如:CIFAR10、SVHN、STL-10数据集。模型最终将数据集分类为10种类别,可以根据需要增加分类数量。训练轮次默认为4轮,同样可以根据需要增加训练轮次。单通道数据集训练4~5轮就可以达到较高的精确度,而对于多通道数据,建议训练轮次在10轮以上,以增大精确度。
项目地址
- 模型仓库:MindSpore/hepucuncao/DeepLearning
项目结构
项目的目录分为两个部分:学习笔记README文档,以及ResNet模型的模型训练和推理代码放在train文件夹下。
├── train # 相关代码目录│ ├── ResNet.py # ResNet模型训练代码│ └── test.py # ResNet模型推理代码└── README.md
训练及推理步骤
- 1.首先运行ResNet.py初始化ResNet网络的各参数
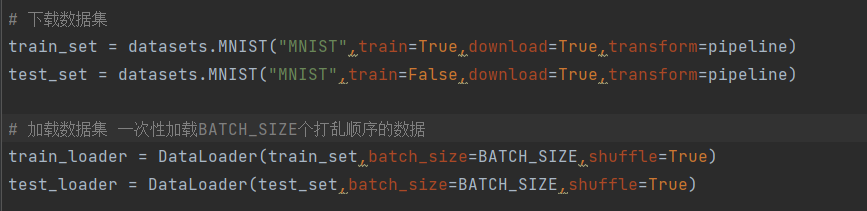
- 2.同时train.py会接着进行模型训练,要加载的训练数据集和测试训练集可以自己选择,本项目可以使用的数据集来源于torchvision的datasets库。相关代码如下:
#下载数据集
train_set = datasets.数据集名称("下载路径",train=True,download=True,transform=pipeline)
test_set = datasets.数据集名称("下载路径",train=False,download=True,transform=pipeline)#加载数据集 一次性加载BATCH_SIZE个打乱顺序的数据
train_loader = DataLoader(train_set,batch_size=BATCH_SIZE,shuffle=True)
test_loader = DataLoader(test_set,batch_size=BATCH_SIZE,shuffle=True)只需把数据集名称更换成你要使用的数据集(datasets中的数据集),并修改下载数据集的位置(默认在根目录下,如果路径不存在会自动创建)即可,如果已经提前下载好了则不会下载,否则会自动下载数据集。同时,程序会将每一个训练轮次的训练过程中的损失值打印出来,并给出每一轮训练的进度条以及损失值变化,损失值越接近0,则说明训练越成功。同时,每一轮训练结束后程序会打印出本轮测试的平均损失值和平均精度。
- 3.由于ResNet.py代码会将精确度最高的模型权重保存下来,以便推理的时候直接使用最好的模型,因此运行ResNet.py之前,需要设置好保存的路径,相关代码如下:
torch.save(model.state_dict(),'保存路径')默认保存路径为根目录,可以根据需要自己修改路径,该文件夹不存在时程序会自动创建。- 4.保存完毕后,我们可以运行test.py代码,同样需要加载数据集(和训练过程的数据相同),步骤同2。同时,我们应将保存的最好模型权重文件加载进来,相关代码如下:
model.load_state_dict(torch.load("文件路径"))文件路径为最好权重模型的路径,注意这里要写绝对路径,并且windows系统要求路径中的斜杠应为反斜杠。另外,程序中创建了一个classes列表来获取分类结果,分类数量由列表中数据的数量来决定,可以根据需要来增减,相关代码如下:
classes=["0","1",..."n-1",
]要分成n个类别,就写0~n-1个数据项。- 5.最后是推理步骤,程序会选取测试数据集的前n张图片进行推理,并打印出每张图片的预测类别和实际类别,若这两个数据相同则说明推理成功。同时,程序会将选取的图片显示在屏幕上,相关代码如下:
for i in range(n): #取前n张图片X,y=test_dataset[i][0],test_dataset[i][1]show(X).show()#把张量扩展为四维X=Variable(torch.unsqueeze(X, dim=0).float(),requires_grad=False).to(device)model.eval() # 设置模型为评估模式with torch.no_grad():pred = model(X)predicted,actual=classes[torch.argmax(pred[0])],classes[y]print(f'predicted:"{predicted}",actual:"{actual}"')推理图片的数量即n取多少可以自己修改,但是注意要把显示出来的图片手动关掉,程序才会打印出这张图片的预测类别和实际类别。实例
这里我们以最经典的MNIST数据集为例:
运行ResNet.py之前,要加载好要训练的数据集,如下图所示:
以及训练好的最好模型权重best_model.pth的保存路径:

这里我们设置训练轮次为4,由于没有提前下载好数据集,所以程序会自动下载在/data目录下,运行结果如下图所示:
最好的模型权重保存在设置好的路径中:

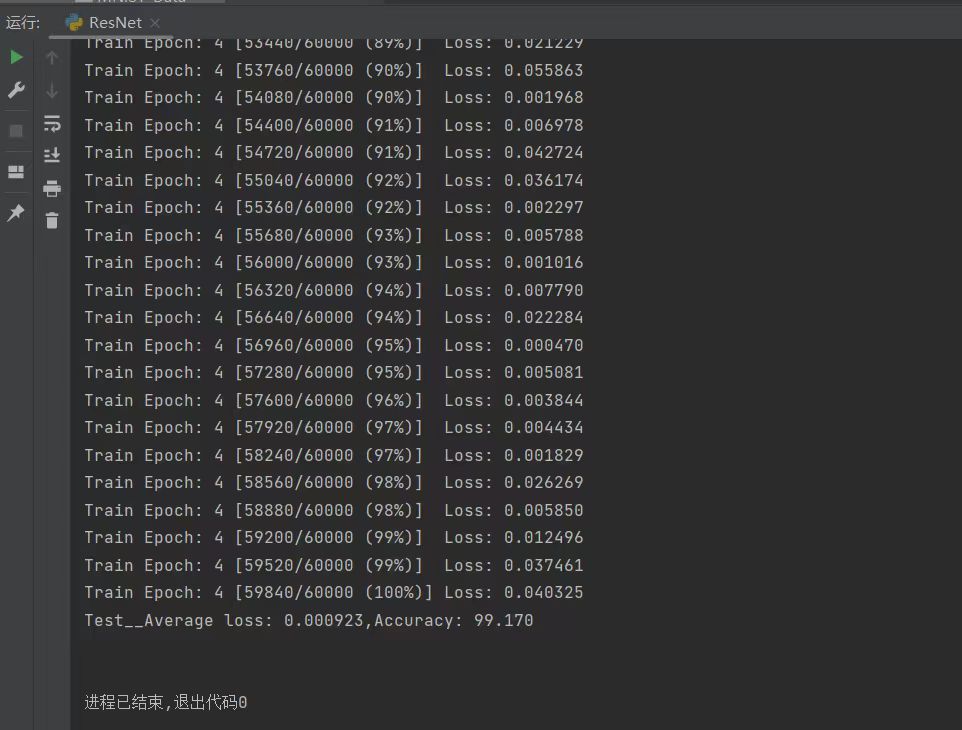
从下图最后一轮的损失值和精确度可以看出,训练的成果已经是非常准确的了!
最后我们运行test.py程序,首先要把train.py运行后保存好的best_model.pth文件加载进来,设置的参数如下图所示:

这里我们设置推理测试数据集中的前20张图片,每推理一张图片,都会弹出来显示在屏幕上,要手动把图片关闭才能打印出预测值和实际值:
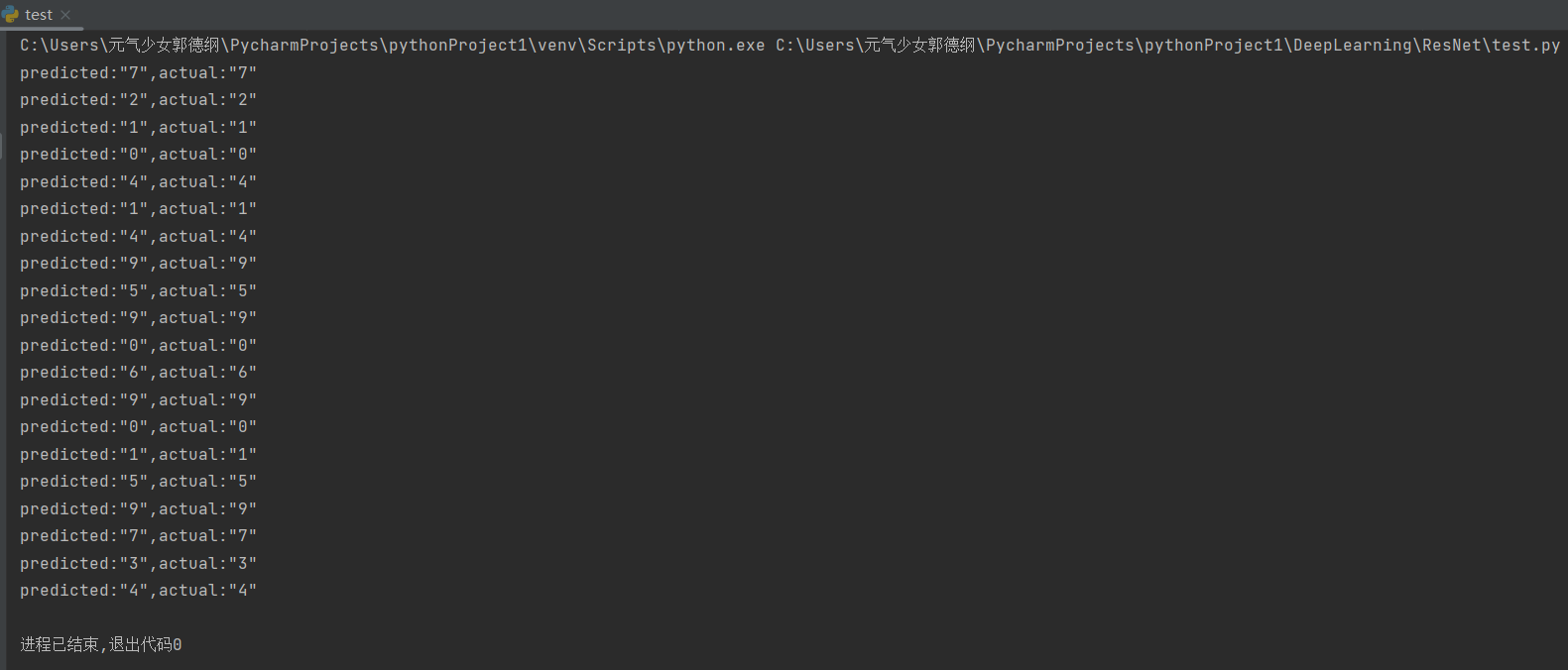
由下图最终的运行结果我们可以看出,推理的结果是较为准确的,大家可以增加推理图片的数量以测试模型的准确性。
其他数据集的训练和推理步骤和MNIST数据集大同小异。


![[QT] MAC使用Qt Creator运行程序如何仅运行一个进程?](https://images.cnblogs.com/cnblogs_com/RioTian/2326543/o_241212043953_image-20241212123730665.png)