已知当前的rt矩阵,和未来下一帧的rt矩阵和未来下一帧的5个点pts,求把pts对齐到当前帧。
import numpy as npdef align_points(rt_current, rt_future, pts_future):# 计算从未来帧到当前帧的相对变换矩阵rt_relative = np.linalg.inv(rt_current) @ rt_future# 将点转换为齐次坐标pts_future_homo = np.hstack((pts_future, np.ones((pts_future.shape[0], 1))))# 对点进行变换pts_current_homo = (rt_relative @ pts_future_homo.T).T# 转换回 3D 坐标pts_current = pts_current_homo[:, :3] / pts_current_homo[:, 3, np.newaxis]return pts_current# 示例输入
rt_current = np.array([[1, 0, 0, 1],[0, 1, 0, 2],[0, 0, 1, 3],[0, 0, 0, 1]]) # 当前帧的RT矩阵rt_future = np.array([[0.866, -0.5, 0, 4],[0.5, 0.866, 0, 5],[0, 0, 1, 6],[0, 0, 0, 1]]) # 未来帧的RT矩阵pts_future = np.array([[1, 1, 1],[2, 2, 2],[3, 3, 3],[4, 4, 4],[5, 5, 5]]) # 未来帧的点# 对齐点到当前帧
pts_current = align_points(rt_current, rt_future, pts_future)
print("Aligned points to current frame:\n", pts_current)
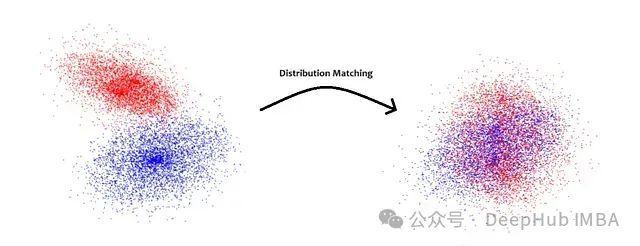
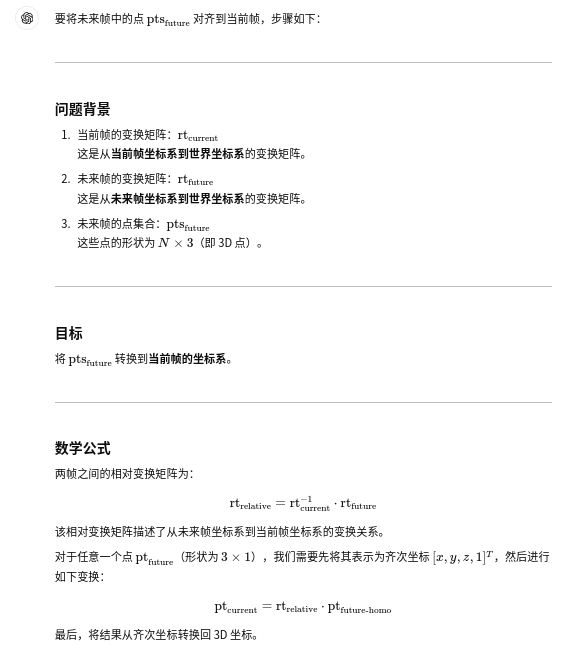
要将未来帧中的点 ( \text{pts}_\text{future} ) 对齐到当前帧,步骤如下:
问题背景
-
当前帧的变换矩阵:( \text{rt}_\text{current} )
这是从当前帧坐标系到世界坐标系的变换矩阵。 -
未来帧的变换矩阵:( \text{rt}_\text{future} )
这是从未来帧坐标系到世界坐标系的变换矩阵。 -
未来帧的点集合:( \text{pts}_\text{future} )
这些点的形状为 ( N \times 3 )(即 3D 点)。
目标
将 ( \text{pts}_\text{future} ) 转换到当前帧的坐标系。
数学公式
两帧之间的相对变换矩阵为:
[
\text{rt}\text{relative} = \text{rt}\text{current}^{-1} \cdot \text{rt}_\text{future}
]
该相对变换矩阵描述了从未来帧坐标系到当前帧坐标系的变换关系。
对于任意一个点 ( \text{pt}\text{future} )(形状为 ( 3 \times 1 )),我们需要先将其表示为齐次坐标 ( [x, y, z, 1]^T ),然后进行如下变换:
[
\text{pt}\text{current} = \text{rt}\text{relative} \cdot \text{pt}\text{future-homo}
]
最后,将结果从齐次坐标转换回 3D 坐标。
实现代码
import numpy as npdef align_points(rt_current, rt_future, pts_future):# 计算从未来帧到当前帧的相对变换矩阵rt_relative = np.linalg.inv(rt_current) @ rt_future# 将点转换为齐次坐标pts_future_homo = np.hstack((pts_future, np.ones((pts_future.shape[0], 1))))# 对点进行变换pts_current_homo = (rt_relative @ pts_future_homo.T).T# 转换回 3D 坐标pts_current = pts_current_homo[:, :3] / pts_current_homo[:, 3, np.newaxis]return pts_current# 示例输入
rt_current = np.array([[1, 0, 0, 1],[0, 1, 0, 2],[0, 0, 1, 3],[0, 0, 0, 1]]) # 当前帧的RT矩阵rt_future = np.array([[0.866, -0.5, 0, 4],[0.5, 0.866, 0, 5],[0, 0, 1, 6],[0, 0, 0, 1]]) # 未来帧的RT矩阵pts_future = np.array([[1, 1, 1],[2, 2, 2],[3, 3, 3],[4, 4, 4],[5, 5, 5]]) # 未来帧的点# 对齐点到当前帧
pts_current = align_points(rt_current, rt_future, pts_future)
print("Aligned points to current frame:\n", pts_current)
运行结果
运行上述代码后,pts_current 将是未来帧中的点 ( \text{pts}_\text{future} ) 对齐到当前帧坐标系后的点集合。
说明
- 公式推导:从未来帧到当前帧,需要相对变换矩阵 ( \text{rt}_\text{relative} ),其计算依赖于两个帧的绝对变换矩阵。
- 适用范围:此方法适用于常见的刚体变换场景,尤其是在 3D 点云处理和计算机视觉任务中。