循环状态空间模型(Recurrent State Space Models, RSSM)最初由 Danijar Hafer 等人在论文《Learning Latent Dynamics for Planning from Pixels》中提出。该模型在现代基于模型的强化学习(Model-Based Reinforcement Learning, MBRL)中发挥着关键作用,其主要目标是构建可靠的环境动态预测模型。通过这些学习得到的模型,智能体能够模拟未来轨迹并进行前瞻性的行为规划。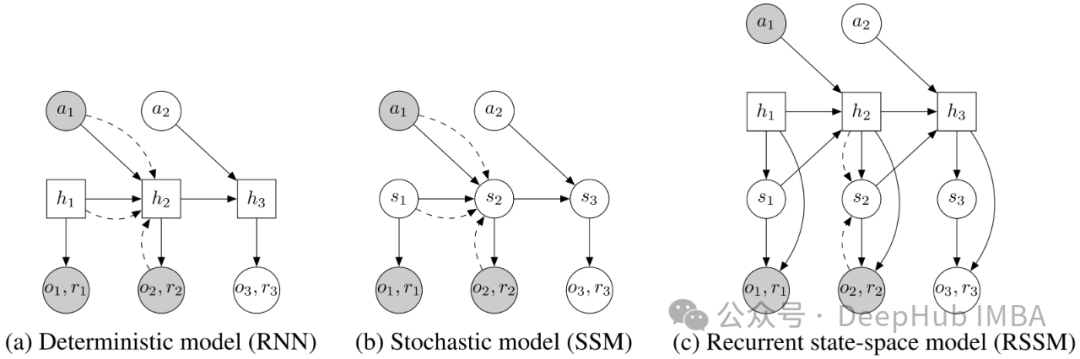
下面我们就来用一个实际案例来介绍RSSM。
https://avoid.overfit.cn/post/8d8412f5ef6544e4ba097547a38830ac