参考资料:
- Vanila Policy Gradient with a Recurrent Neural Network Policy – Abhishek Mishra – Artificial Intelligence researcher
- 动手学强化学习-HandsOnRL,本文中展示的代码都是基于《动手学RL》的代码库。
- rlorigro/cartpole_policy_gradient: a simple 1st order PG solution to the openAI cart pole problem (adapted from @ts1839) and an RNN based PG variation on this
为什么使用RNN
对于一些简单的环境,只需要知道当前时刻的状态以及动作,就可以预测下一个时刻的状态 (即环境满足一元的马尔可夫假设)。比如说车杆环境:

但是:
- 对于一些复杂的环境,可能需要多个时刻的状态才足以预测下一时刻。
- 在部分可观测的环境,我们无从知道环境的真实状态。
在DQN玩雅达利游戏中,作者是将连续几帧的图像作为状态传入网络。一种可能更好的替代方法是使用RNN作为策略网络。
代码
基于动手学强化学习-HandsOnRL的ActorCritic代码进行修改。主要改动:
- 策略网络使用RNN.
- 每次
tack_action的时候就计算log_probs,并且记录下来,而不是最后在update时一起计算。记录log_probs时,应该使用Tensor,保留梯度。 - 每个episode开始的时候,应该清空隐状态
h.
导入包
import gym
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
import rl_utils
from tqdm import tqdm
值网络和RNN策略网络
class ValueNet(torch.nn.Module):def __init__(self, state_dim, hidden_dim):super(ValueNet, self).__init__()self.fc1 = torch.nn.Linear(state_dim, hidden_dim)self.fc2 = torch.nn.Linear(hidden_dim, 1)def forward(self, x):x = F.relu(self.fc1(x))return self.fc2(x)class RNNPolicy(torch.nn.Module):def __init__(self, state_dim, hidden_dim, action_dim):super(RNNPolicy, self).__init__()self.rnn = nn.GRUCell(input_size=state_dim, hidden_size=hidden_dim)self.fc = nn.Linear(hidden_dim, action_dim)def forward(self, x, hidden_state=None): # 传入x和hidden_stateh = self.rnn(x, hidden_state)x = F.leaky_relu(h)return F.softmax(self.fc(x), dim=-1), h
ActorCritic-Agent
class RNN_ActorCritic:def __init__(self, state_dim, hidden_dim, action_dim, actor_lr, critic_lr, gamma, device) -> None:self.actor = RNNPolicy(state_dim, hidden_dim, action_dim)self.critic = ValueNet(state_dim, hidden_dim)self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=actor_lr)self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr=critic_lr)self.gamma = gammaself.device = devicedef take_action(self, state, hidden_state=None):state = torch.tensor([state], dtype=torch.float).to(self.device)action_prob, hidden_state = self.actor(state, hidden_state)action_dist = torch.distributions.Categorical(action_prob)action = action_dist.sample()log_prob = action_dist.log_prob(action)return action.item(), hidden_state, log_prob # 返回action, 隐状态, log_probdef update(self, transition_dict):states = torch.tensor(transition_dict['states'],dtype=torch.float).to(self.device)rewards = torch.tensor(transition_dict['rewards'],dtype=torch.float).view(-1, 1).to(self.device)next_states = torch.tensor(transition_dict['next_states'],dtype=torch.float).to(self.device)dones = torch.tensor(transition_dict['dones'],dtype=torch.float).view(-1, 1).to(self.device)# 使用torch.stack()将log_probs转换为tensor,可以保留梯度log_probs = torch.stack(transition_dict['log_probs']).to(self.device)td_target = rewards + self.gamma * self.critic(next_states) * (1 - dones)td_delta = td_target - self.critic(states) actor_loss = torch.mean(-log_probs * td_delta.detach())critic_loss = torch.mean(F.mse_loss(self.critic(states), td_target.detach()))self.actor_optimizer.zero_grad()self.critic_optimizer.zero_grad()actor_loss.backward() critic_loss.backward() self.actor_optimizer.step() self.critic_optimizer.step()
训练过程
def train_on_policy_agent(env, agent, num_episodes, render=False):return_list = []for i in range(10):with tqdm(total=int(num_episodes/10), desc='Iteration %d' % i) as pbar:for i_episode in range(int(num_episodes/10)):episode_return = 0transition_dict = {'states': [], 'next_states': [], 'rewards': [], 'dones': [], 'log_probs': []}state = env.reset()# 初始化hidden_statehidden_state = Nonedone = Falsewhile not done:action, hidden_state, log_prob = agent.take_action(state, hidden_state)next_state, reward, done, _ = env.step(action)if render:env.render()transition_dict['states'].append(state)transition_dict['next_states'].append(next_state)transition_dict['rewards'].append(reward)transition_dict['dones'].append(done)# 无需记录action, 因为记录action是为了计算log_prob,而我们已经算好了log_probtransition_dict['log_probs'].append(log_prob)state = next_stateepisode_return += rewardreturn_list.append(episode_return)agent.update(transition_dict)if (i_episode+1) % 10 == 0:pbar.set_postfix({'episode': '%d' % (num_episodes/10 * i + i_episode+1), 'return': '%.3f' % np.mean(return_list[-10:])})pbar.update(1)return return_list
训练
actor_lr = 1e-3
critic_lr = 1e-2
num_episodes = 1000
hidden_dim = 128
gamma = 0.98
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")env_name = 'CartPole-v0'
env = gym.make(env_name)
env.seed(0)
torch.manual_seed(0)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = RNN_ActorCritic(state_dim, hidden_dim, action_dim, actor_lr, critic_lr,gamma, device)
return_list = train_on_policy_agent(env, agent, num_episodes)
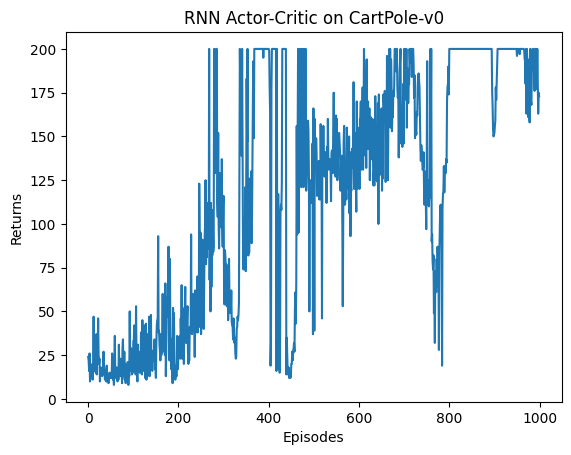
CartPole结果
这是使用RNN策略网络的结果:
这是使用普通MLP的结果 (Hands-On-RL原来的结果):
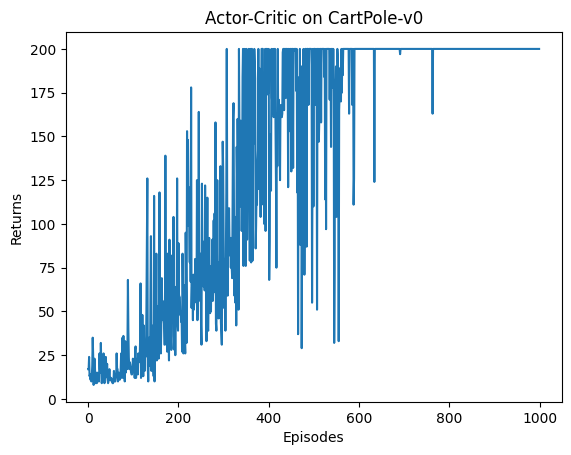
用RNN效果相对差的可能原因:
- 环境太简单。
- RNN要学习的参数更多,收敛速度更慢。