一、ConcurrentHashMap整体结构
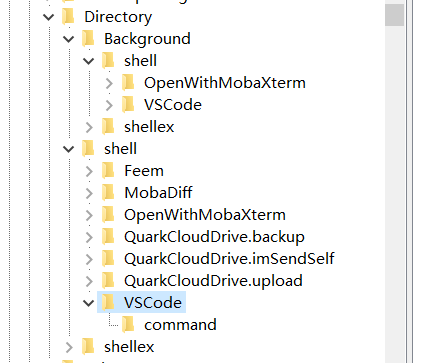
ConcurrentHashMap的数据结构与HashMap差不多,都是Node数组+红黑树+链表;ConcurrentHashMap中table的节点类型有 3 类:
-
Node节点,是链表类型的节点;这类节点hash 大于 0 ;
-
在扩容时ConcurrentHashMap会有一个特殊的标志对象:ForwardingNode;hash值: MOVE(-1)
-
在生成红黑树时,会生成一个TreeBin对象放在table中;hash值:TREEBIN(-2)
因此在put值时,会根据table中node的hash判断节点的类型;
-
hash>=0,Node是链表类型的节点;
-
hash=-2,是TreeBin,表示该table元素是红黑树的节点;
-
hash=-1,是ForwardingNode;容器正在扩容
-
hash = -3,是ReservationNode,在调用computeIfAbsent方法时可能会使用的占位对象(本文不讨论computeIfAbsent方法,因此只关注前三种对象)
ConcurrentHashMap和HashMap的put值过程有些类似,ConcurrentHashMap的结构也是table + 链表+ 红黑树;在put值时,锁粒度是table的元素;也就是说,当put值时定位到table的第 i 个元素,那么就会给table[i]上锁;
其他线程在put值时也定位到 i 时就需要等待获取锁;如果是其他位置则不需要等待锁,可以进行put操作。
二、计算hash值
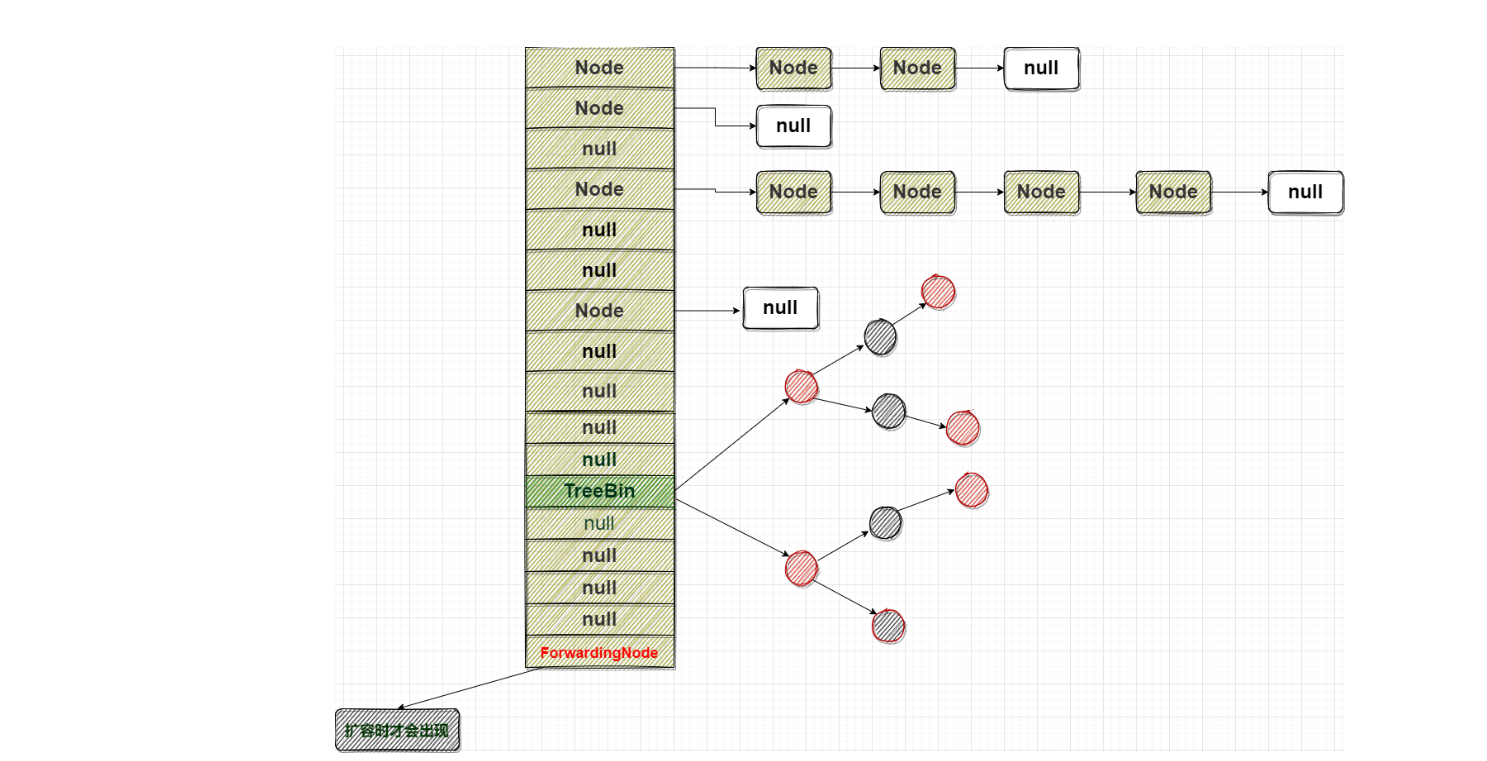
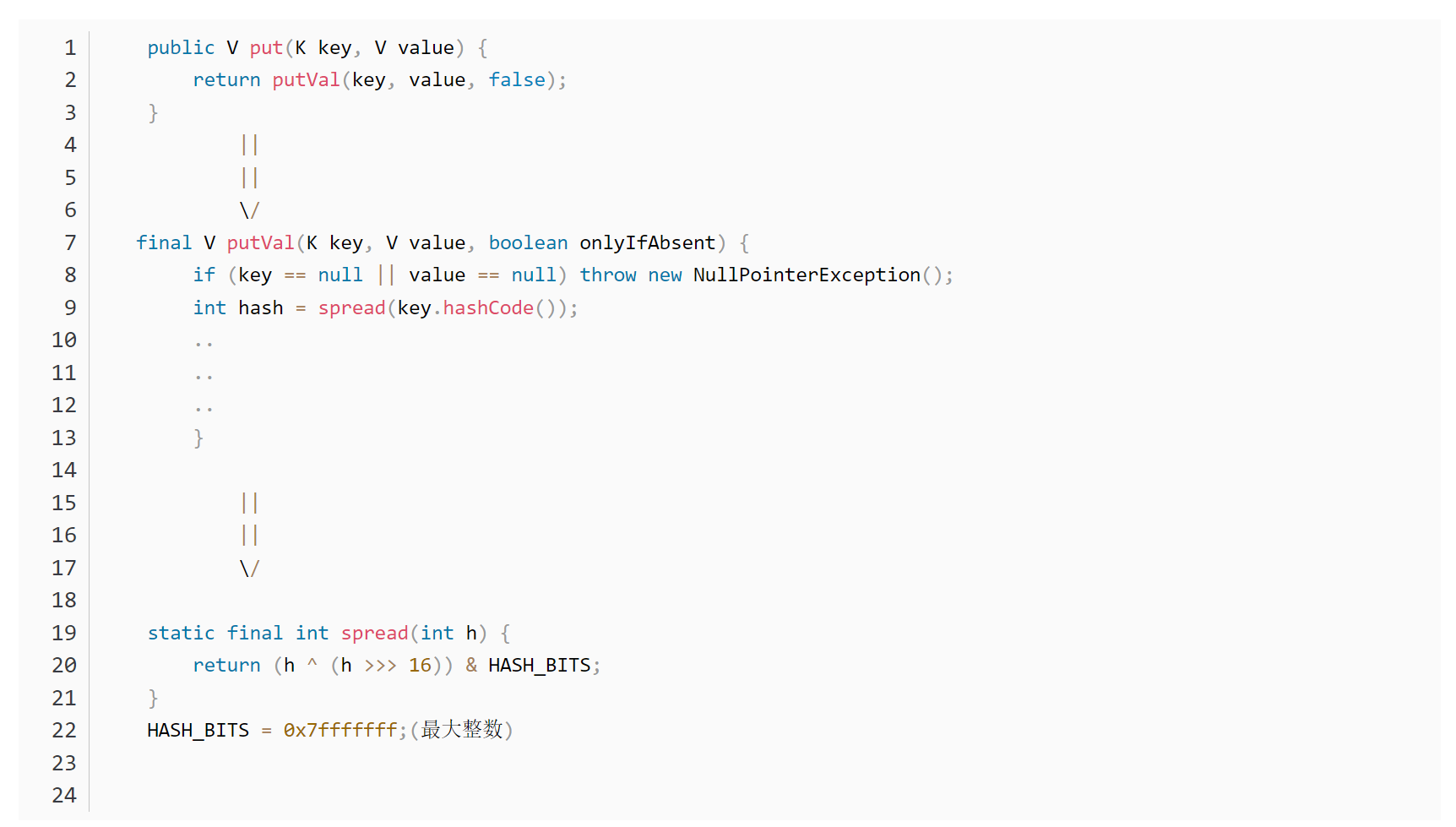
ConcurrentHashMap在put值的时候会计算key的hash值,和HashMap类似;在ConcurrentHashMap计算hash值的是spread方法
-
获取key的hashcode
-
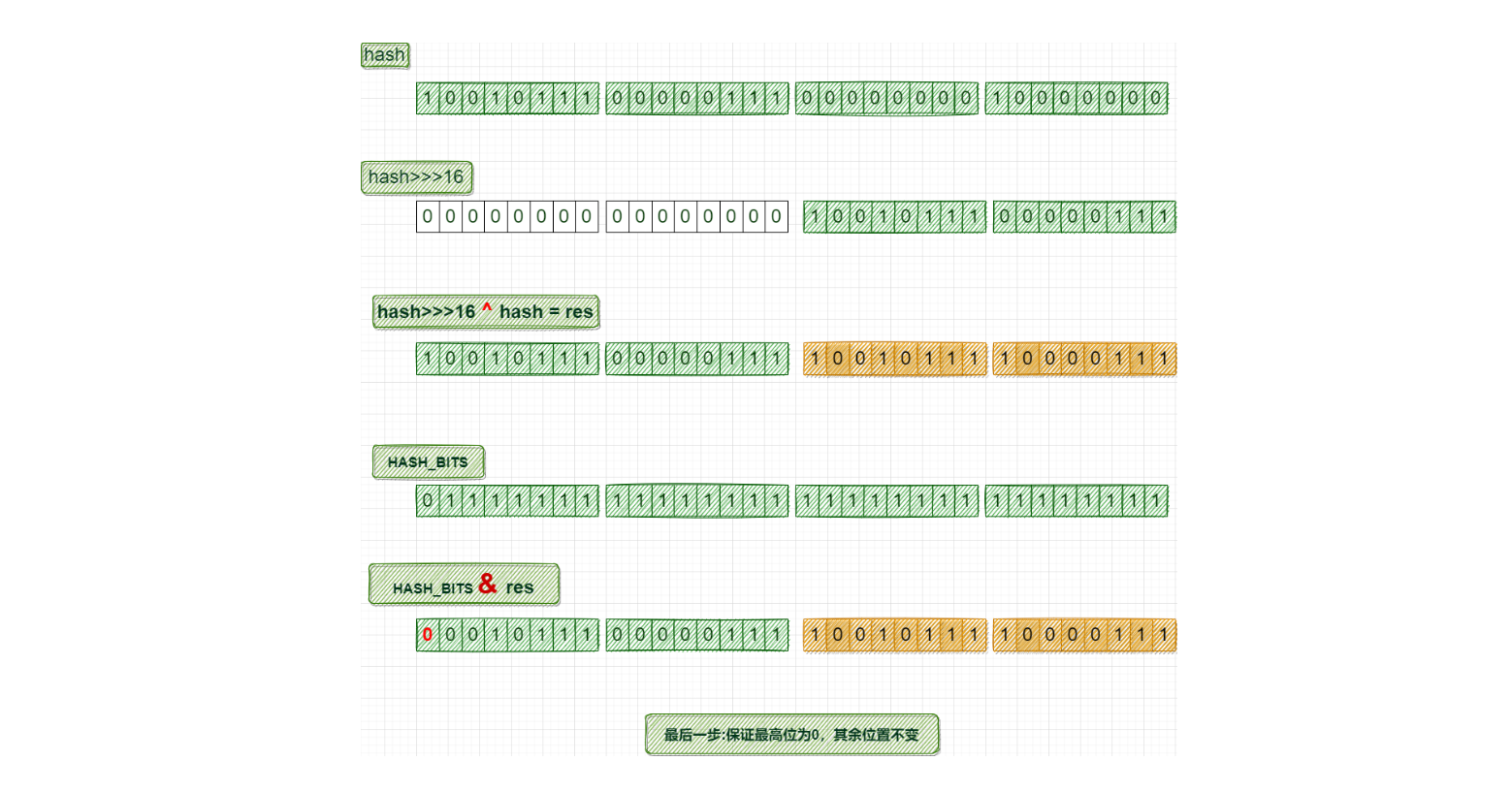
利用hashcode的高16位与低16位做" ^ "位运算,让高位也参与位运算,增加离散型
-
再与HASH_BITS位运算,这是int最大正整数:最高位为0,其余位置为1,用来与hash值做 " & "运算;得到的结果保证最高位为0,其余位置不变;这样就保证得到的hash值是一个非负数;
举个例子:
三、initTable
在put值时有几个判断,与HashMap类似
-
判断table是否已经初始化了;如果是没有初始化,就会先初始化table,再往table中添加值;
-
根据hash值,计算出key-value在table的位置i,判断table[i]是否已经插入了值;如果没有插入值,就将该key-value插入到table[i]中;
-
判断table[i]的hash值是否是MOVE,如果是MOVE表示正在扩容(ForwardingNode的hash值就是MOVE),需要该线程帮忙将旧容器的值移动到新容器中
-
将key-value插入到链表或者红黑树中
-
判断是否需要扩容
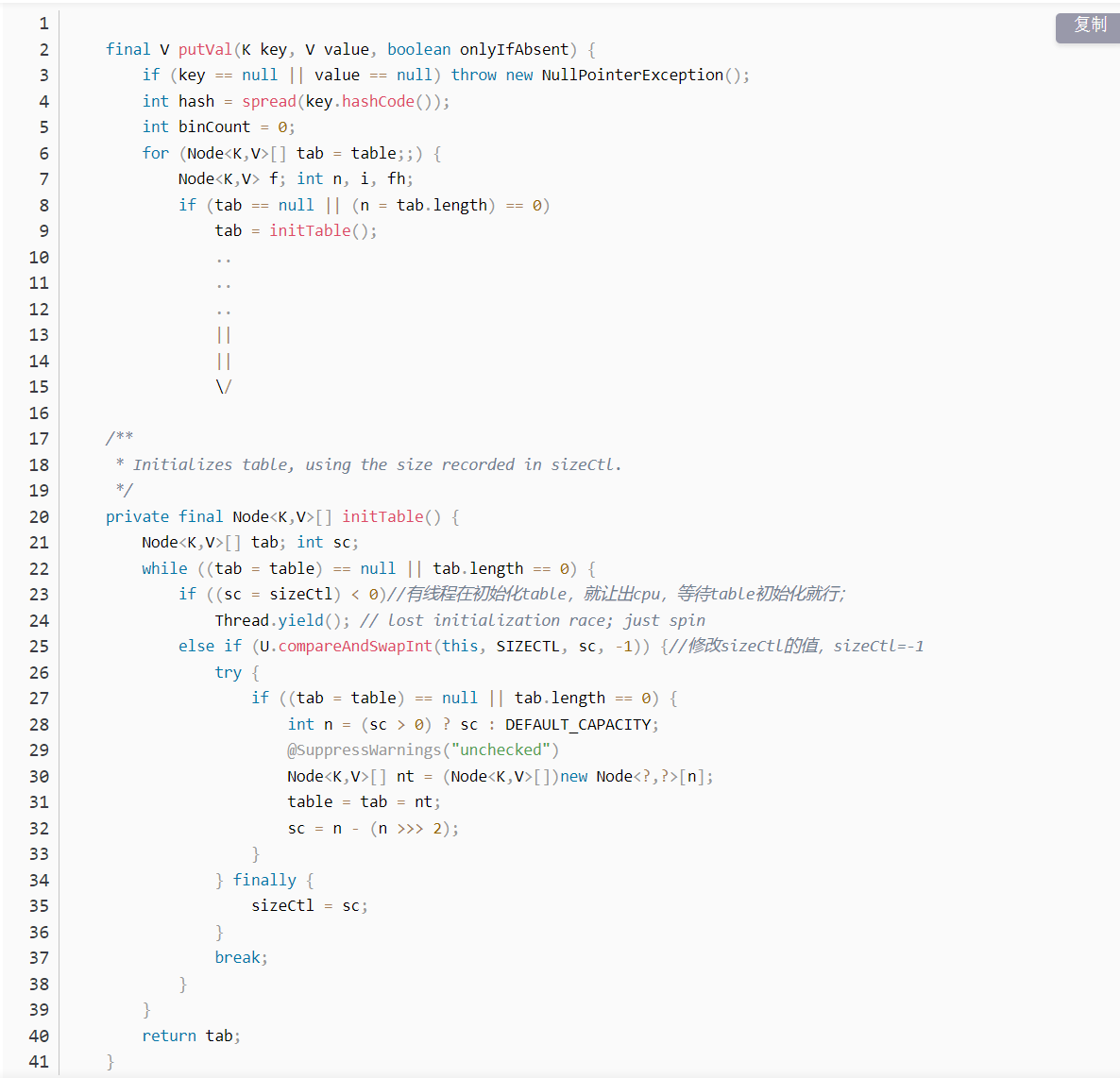
3.1、初始化table
因为是多线程环境,就需要考虑到如果有多个线程同时初始化table的情况;假如现在有三个线程:A、B、C 同时判断到table == null。这个时候三个线程都会同时试图来初始化table,如果一个线程抢先修改了 sizeCtl,
他就可以初始化table,其余线程只需要等待初始化完成即可;
-
1、sizeCtl判断是否已经有线程初始化table,如果sizeCtl=-1,表示已经有线程对table初始化;这个时候会调用yield()让出cpu执行权
-
2、通过CAS修改sizeCtl=-1,初始化table
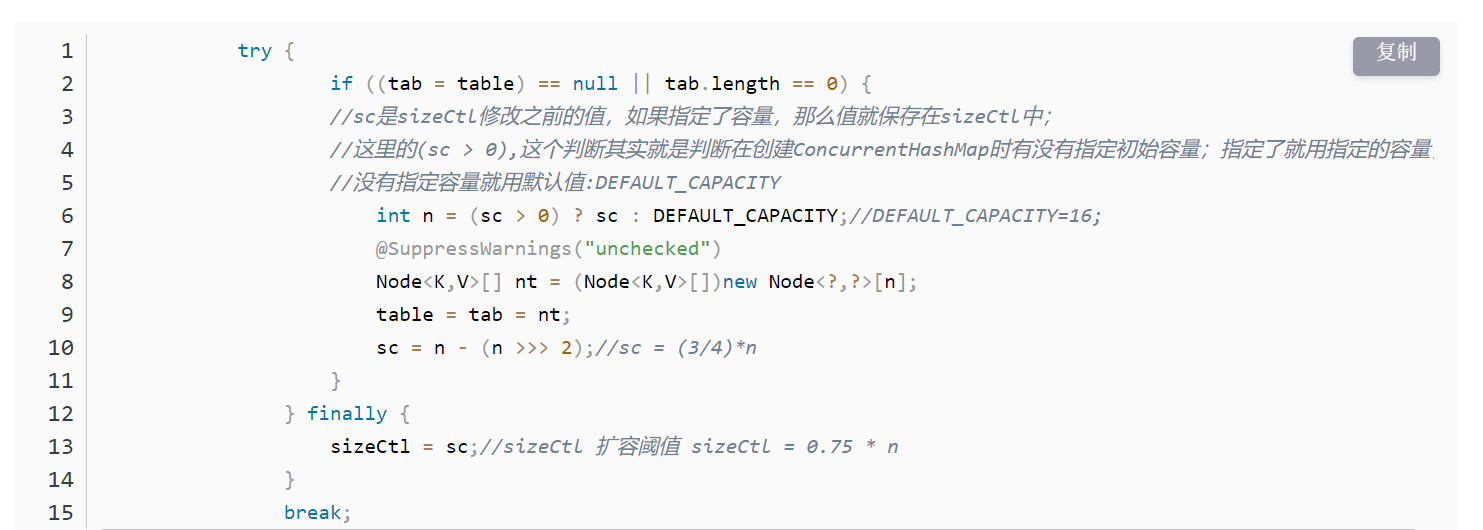
这段代码,有意思的是进入到初始化table的分支时 try{} finally{} 代码块还要判断 table==null,为什么呢 ?
可能是对应这样一个场景:现在有 A ,B,C三个线程都判断table=null进入到initTable,A,B线程先获取到sizeCtl =0,此时A抢先修改到sizeCtl =-1开始初始化,而B线程修改失败,再次通过循环获取sizeCtl =-1,
调用yield()放弃cpu执行权,等待A线程初始化table;A线程初始化完成之后修改sizeCtl 的值,修改后的sizeCtl >0;
而C线程比A,B线程慢一点,当C线程获取到sizeCtl的值时,A线程已经完成了table的初始化sizeCtl >0,C线程获取到的sc=sizeCtl >0,因此不会进入到休眠状态,会尝试修改sizeCtl 的值,这个时候没有其他线程竞争修改值,
因此会修改成功;又会将sizeCtl 的值修改为 -1 ,【此时:sc=A线程初始化之后sizeCtl 的值;sizeCtl =-1】
进入到try代码块,判断table!=null,不会再重新初始化table,进入finally块,sizeCtl =sc;将sizeCtl 的值还原到A线程初始化时候的值;
添加的table=null的判断保证了只会有一个线程能初始化table;
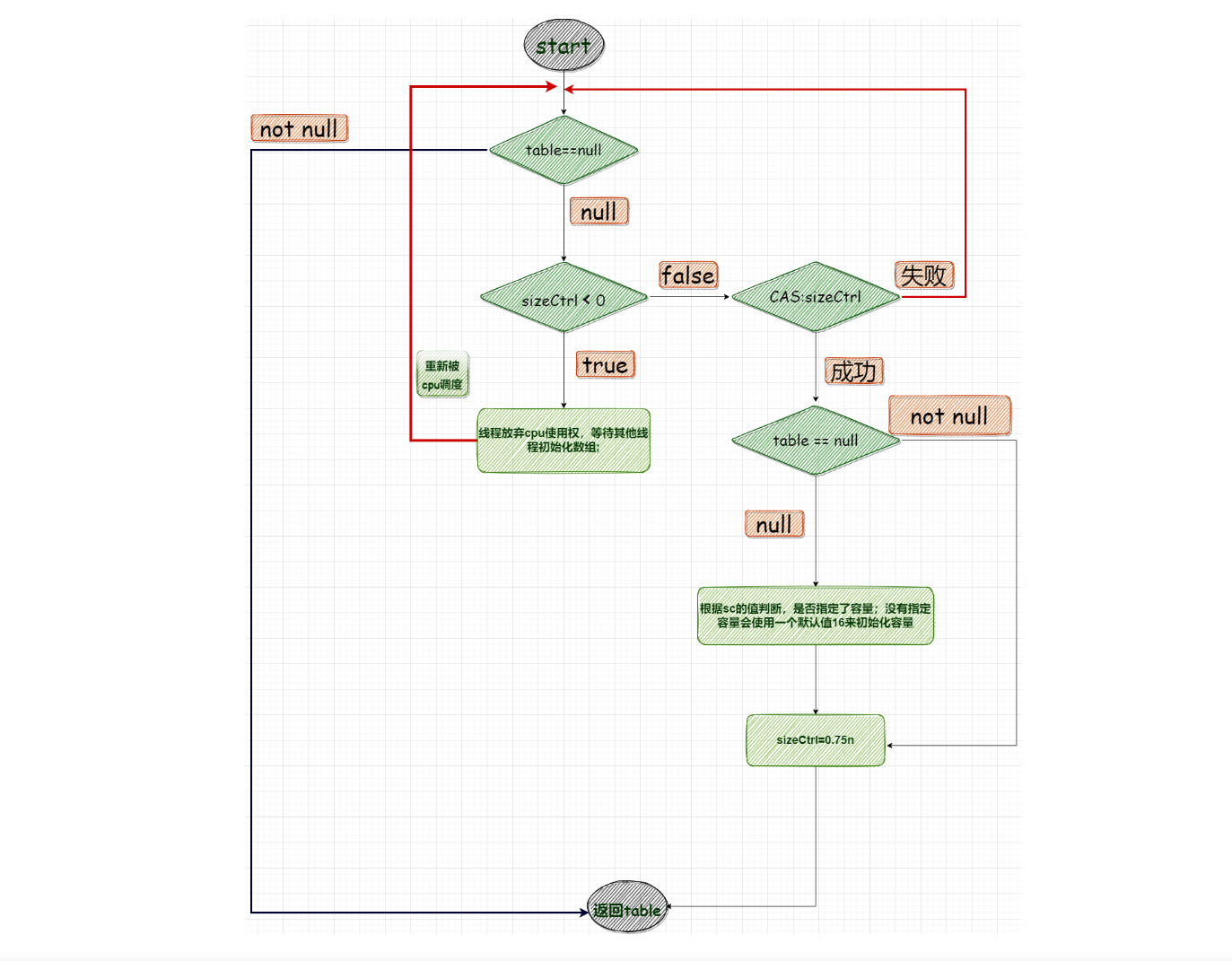
流程:
3.2、思考
在try代码块中判断table是否已经初始化保证了只有一个线程能初始化table,这个 和 DCL(双重检测枷锁,差不多);这段代码能修改吗 ?
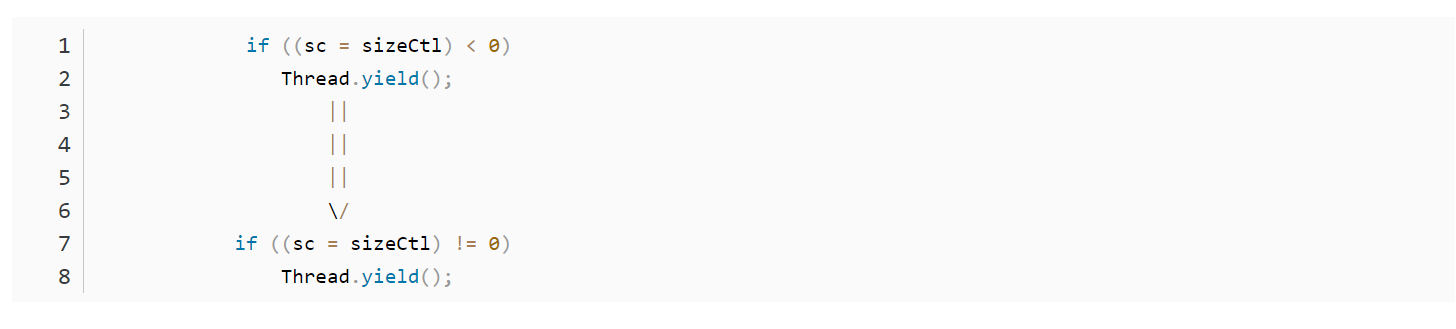
因为只要sizeCtl != 0,就说明已经有线程在初始化table,其余线程都可以等待带线程初始化完成,这样当线程获初始化table的时就不用再判断table是否为null了,因为只能有一个线程能进入这个分支,对table进行初始化;
这样看起来似乎没什么问题,但是忽略了一个问题,在ConcurrentHashMap的构造对象中有一个构造方法可以指定初始容量,而保存初始容量的变量就是sizeCtl ,也就是说如果指定了初始容量sizeCtl 值就 大于0;
而指定初始容量时并不会初始化一个数组;因此不能修改成:(sc = sizeCtl) != 0,如果修改成这样,那么在指定初始容量之后,所有线程都不能初始化table了;同时也可以看到在初始化时利用了sizeCtl的值:
四、通过hash值定位key-value位置

这个分支其实就是判断table[i] = null,就将key-value值包装程成Node对象,放到table[i]中即可;
-
i = (n - 1) & hash;与HashMap一样,定位存储下标,因为使用了 & 运算,因此要求table的容量n一定是2的幂次倍;
-
casTabAt()将hash-key-value包装成node添加到table中,添加成功:返回true,进入分支break,结束put操作;不成功:进入下一次循环,继续put操作直到成功为止;
五、判断ConcurrentHashMap是否正在扩容

在上一个分支,如果table[i] != null,就会在接下来的分支中,首先通过node节点的hash值判断,table是否处于扩容状态,如果是扩容状态: hash == MOVE;
当判定在扩容时,会要求这个线程帮忙完成扩容:
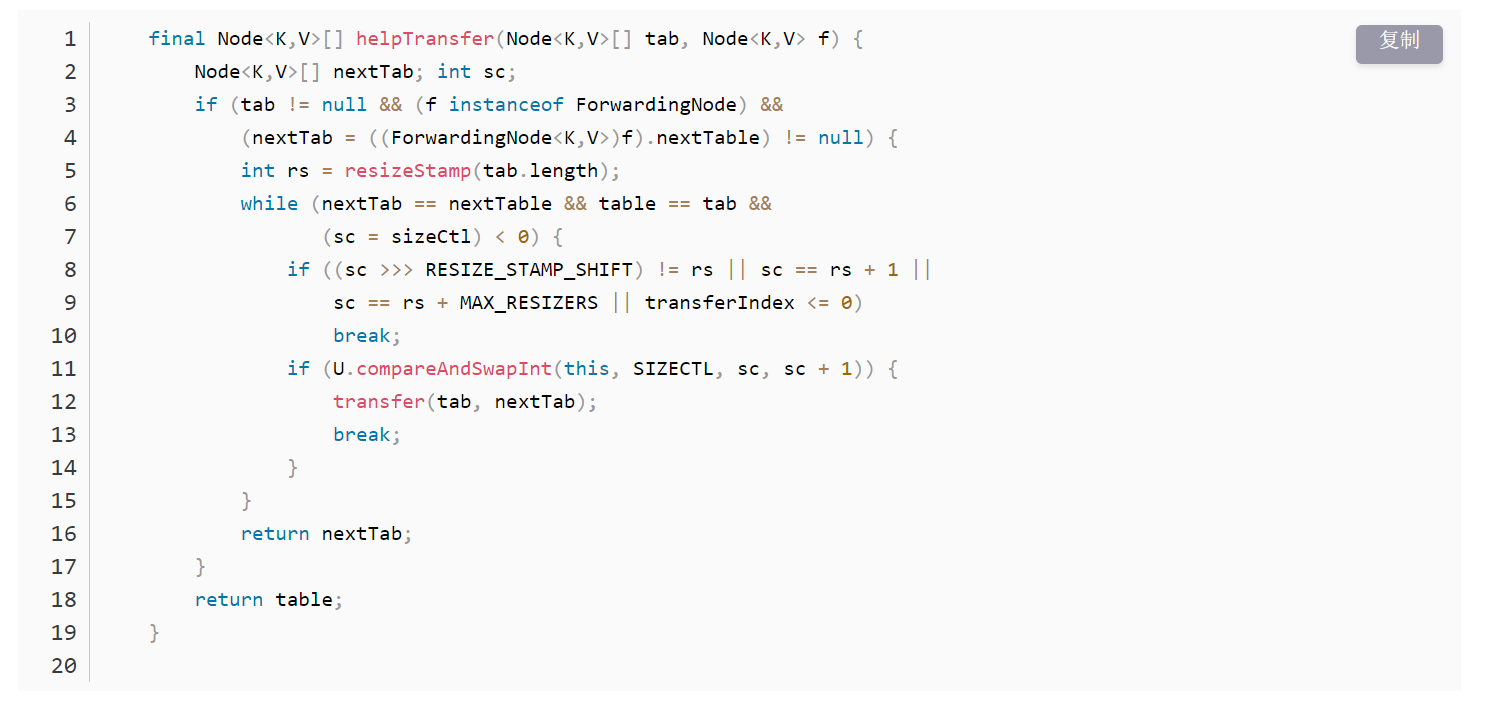
扩容暂时在这里不分析,在后面会讲到;因为扩容是添加node导致,在添加元素之后会判断是否需要扩容;在前面提到过,在扩容时会产生:ForwardingNode;它的hash值就是MOVE(-1);由于扩容实在太复杂,
并且扩容的原因并不在这里;扩容触发条件是添加node之后size到达扩容阈值触发扩容;因此把扩容的部分放在最后;
六、判断节点的类型,并添加节点;
判断节点类型,并添加值:
-
如果是链表,就将值打包成Node,添加到链表中;
-
如果是红黑树,就将值打包成TreeNode添加到红黑树中
这个过程和 HashMap一样;唯一的区别是,在多线程环境下,在确定table的下标之后,会获取table[i]对象的锁,只能有一个线程在table[i]所在的链表或者红黑树put值;其他线程要在table[i]中put值需要等待获取锁;
// f = tabAt(tab, i = (n - 1) & hash)else {V oldVal = null;synchronized (f) {//获取table[i]的对象锁if (tabAt(tab, i) == f) {//判断是否被修改if (fh >= 0) {//根据node的hash值判断是链表还是红黑树binCount = 1;for (Node<K,V> e = f;; ++binCount) {K ek;// 已经存在key,更新val,返回旧valueif (e.hash == hash &&((ek = e.key) == key ||(ek != null && key.equals(ek)))) {oldVal = e.val;if (!onlyIfAbsent)e.val = value;break;}Node<K,V> pred = e;// key在链表中不存在,将key-value打包成Node插入到链表表尾if ((e = e.next) == null) {pred.next = new Node<K,V>(hash, key,value, null);break;}}}else if (f instanceof TreeBin) {//红黑树Node<K,V> p;binCount = 2;if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,value)) != null) {oldVal = p.val;//p !=null ,说明在红黑树中已经存在key,只是更新了value;if (!onlyIfAbsent)p.val = value;}}}}if (binCount != 0) {if (binCount >= TREEIFY_THRESHOLD)treeifyBin(tab, i);if (oldVal != null)return oldVal;break;}}}
为了更好的看清上面代码的整体逻辑,去掉部分代码,留下一个大的框架:
//当有一个线程 : A ,锁定table[i]时,其余线程如果也是锁定这个位置,就必须等A线程,put完成之后;//获取到table[i]的锁,才能在这个位置put值;synchronized (f) {//判断节点没有变动;如果变动了,就计入下一次循环;//f发生改变的几种情况://1:有可能链表变成红黑树,//2:可能容器在扩容;//3:如果其他线程在之前进行了remove操作,导致f被删除,这种情况也不能直接put;//还有一种情况:就是key-value的值被修改,这种情况对下一个线程put值没有影响;//因此可以看到在很多地方,对节点进行操作前,都会先判断节点有没有改变;if (tabAt(tab, i) == f) {if(fh>=0){binCount=1;链表,会将新node添加到链表末尾,在这个过程中binCount会记录链表的长度,用来判断是否需要将链表修改为红黑树;还有一种情况是这个key已经存在,就直接更新value;}else if(f instanceof TreeBin){binCount=2;红黑树,这里的binCount就是只用来表示该线程抢到锁,已经put值了;}}}//说明已经添加了node;binCount=0是因为线程没有put值,//f已经被其他线程删除,或者是正在扩容,或者是由链表改成了红黑树。。if (binCount != 0) {if (binCount >= TREEIFY_THRESHOLD)//这里是用来判断链表需不需要改成红黑树;treeifyBin(tab, i);if (oldVal != null)//key已经存在了,会将value更新;并返回旧值oldValuereturn oldVal;break;}