本机环境和实现目标
本机的系统位ubuntu20.04,已安装有ros noetic和PX4_Firmware,能够在Gazebo的环境中进行无人机的仿真。因为后续需要用实验室搭载有realsense D435i相机的无人机进行集群跟踪与避障的实验,准备为Gazebo中的iris无人机搭载上D435i相机先进行仿真验证。
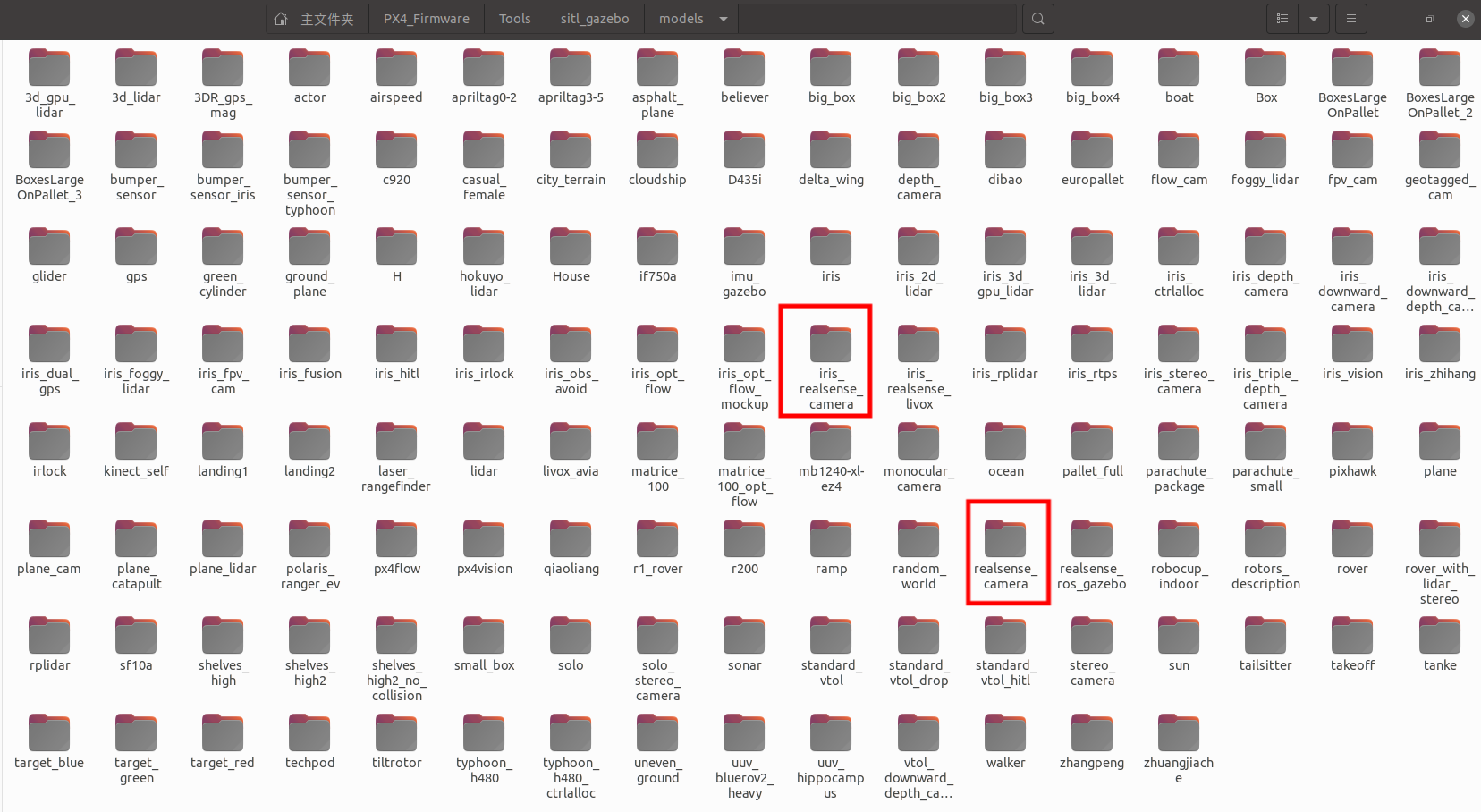
注意:D435i相机是一款深度相机,由左右两个红外摄像头和一个RGB相机组成,能够给用户返回深度图像、左右眼图像和RGB图像。PX4_Firmware的gazebo模型中已有配备realsense相机和搭载有realsense相机的无人机,如下图所示。但为了在心理上觉得仿真更加可靠以及我严重的强迫症,我还是希望自己将realsense开源的D435i相机模型安装到iris无人机上,嫌麻烦的可以直接使用中的iris_realsense_camera模型,该模型同样能返回深度图像、左右眼图像和RGB图像等信息。写文档的时候对比了其中的.sdf文件,两者确实是一样的,区别只在于发布图像话题的名字不同,以及相机外观可能不同。
下载realsense_gazebo_ros功能包并进行编译
新建工作空间,在工作空间中克隆realsense_gazebo_ros功能包并进行编译,过程如下:
mkdir -p realsense_ws/src
cd realsense_ws/src
git clone https://gitee.com/nie_xun/realsense_ros_gazebo.git
cd realsense_ws
catkin_make
source devel/setup.sh
编译过后我们在该工作空间的/devel/lib目录下得到了librealsense_gazebo_plugin.so共享库,在加载D435i相机模型时会调用到该共享库。
接下来查询Gazebo插件的位置,打开终端输入:
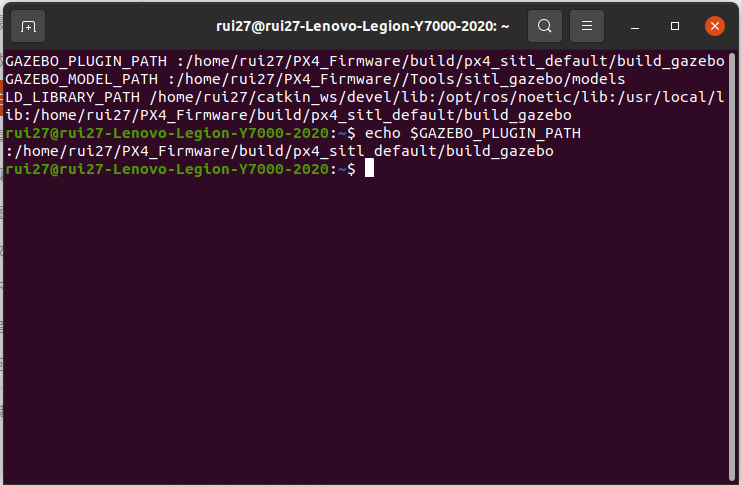
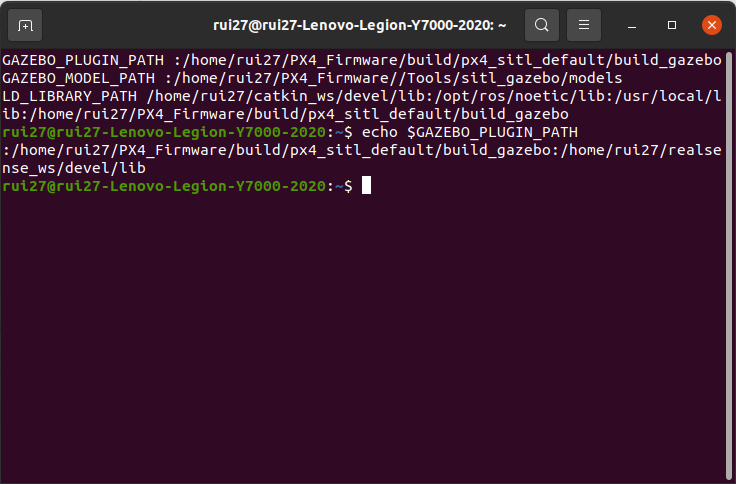
echo $GAZEBO_PLUGIN_PATH
终端返回Gazebo插件的路径,运行Gazebo时系统会到下面的路径中寻找需要用到的.so共享库,如下图所示,我Gazebo插件的路径是/home/rui27/PX4_Firmware/build/px4_sitl_default/build_gazebo。
为了确保加载相机模型时能找到刚刚编辑的librealsense_gazebo_plugin.so共享库,我们可以把刚编译得到的librealsense_gazebo_plugin.so存放到上面的路径中,也可以将目前librealsense_gazebo_plugin.so所在的目录添加进Gazebo插件的路径中。
1、将librealsense_gazebo_plugin.so存放到GAZEBO_PLUGIN_PATH中
直接复制过去即可,若权限不够,则可以用sudo nautilus命令打开文件夹再进行复制。
2、将librealsense_gazebo_plugin.so所在的添加为GAZEBO_PLUGIN_PATH
在文件夹右上角勾选”显示隐藏文件“,在主目录找到并打开.bashrc文件,在底部添加librealsense_gazebo_plugin.so所在的路径:
export GAZEBO_PLUGIN_PATH=$GAZEBO_PLUGIN_PATH:/home/rui27/realsense_ws/devel/lib
保存.bashrc文件后打开终端,输入以下指令刷新环境变量,并再次查询GAZEBO_PLUGIN_PATH,能发现新添加的路径:
source ~/.bashrc
echo $GAZEBO_PLUGIN_PATH
将D435i模型安装在iris无人机上
首先将D435i的模型放入Gazebo的模型库中。
官方给出的添加相机的方式是基于.xacro格式的,但iris无人机是基于.sdf格式的,两者并不兼容,所以我们要将.sdf格式的D435i相机放入Gazebo的模型库中,再进行相机的安装。
打开终端输入以下指令:
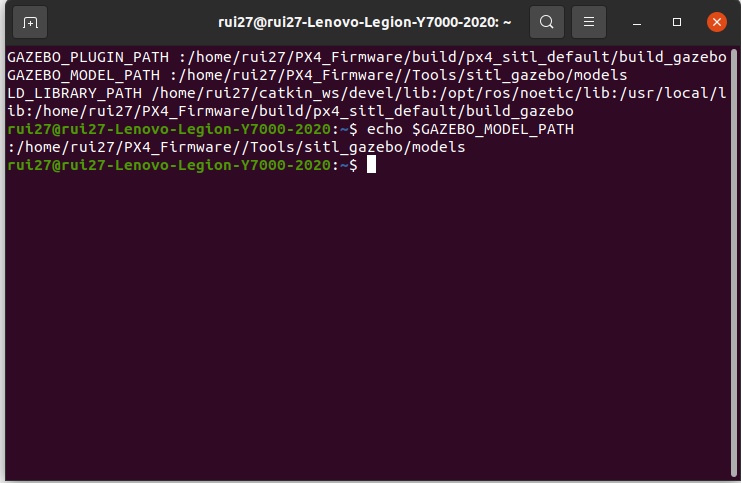
echo $GAZEBO_MODEL_PATH
终端会显示Gazebo中模型的路径,如下图所示:
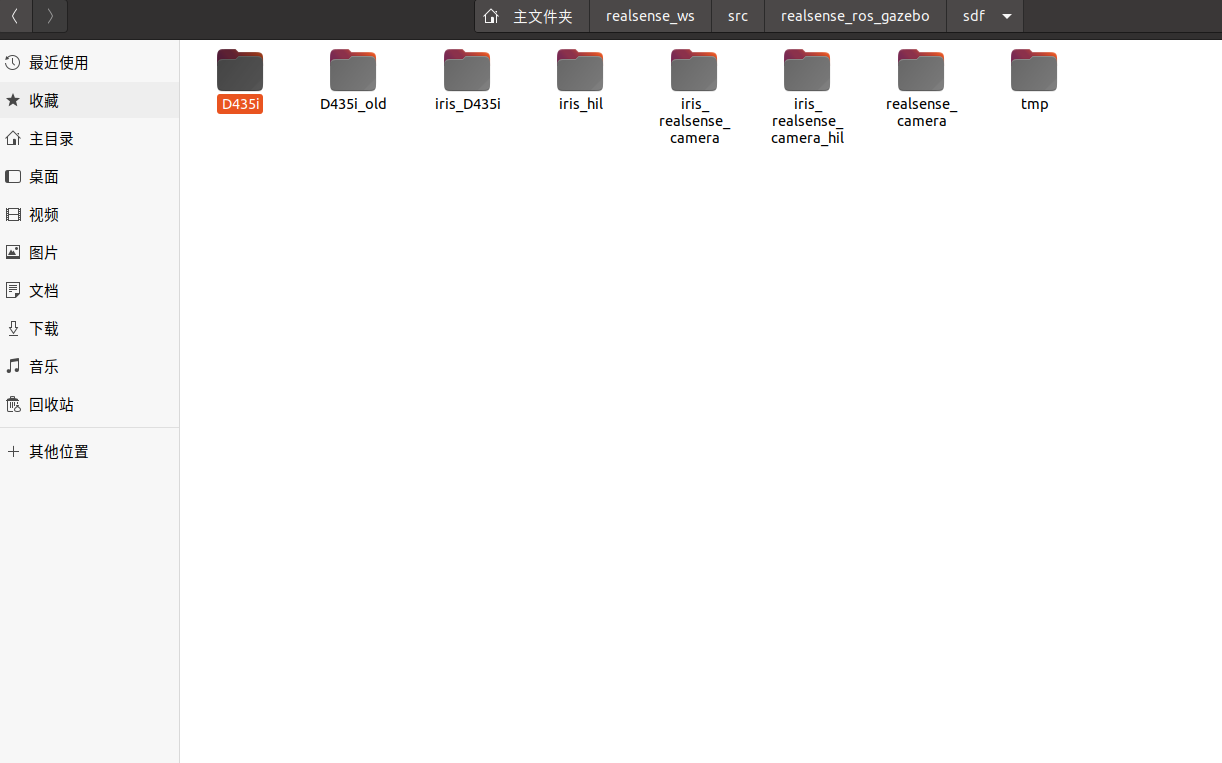
接下来将下图中的D435i文件夹复制到中
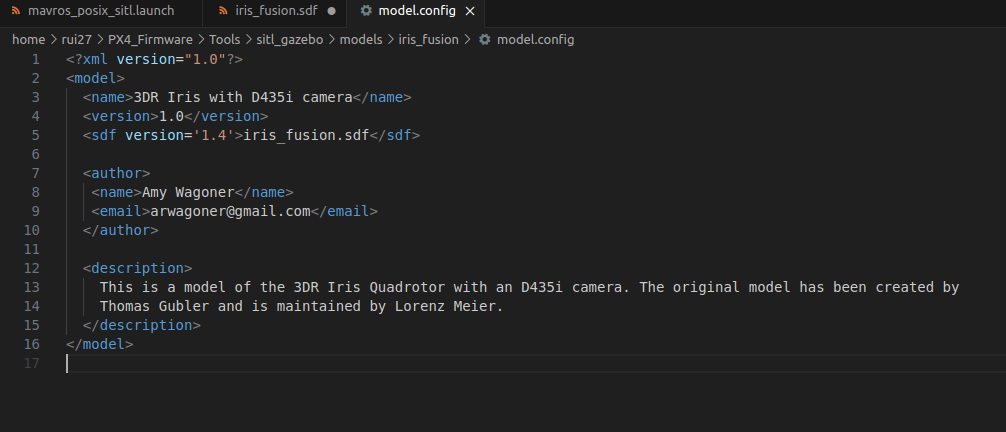
随后在该路径下创建iris_fusion文件夹,在文件夹中添加iris_fusion.sdf文件和model.config文件,文件内容如下:
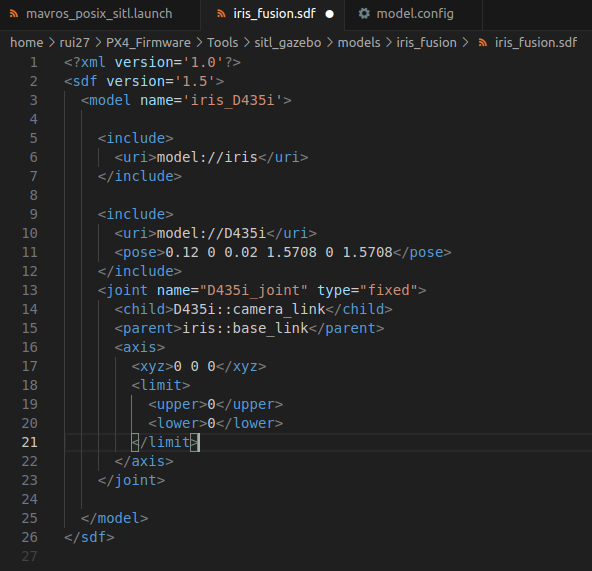
<?xml version='1.0'?>
<sdf version='1.5'><model name='iris_D435i'><include><uri>model://iris</uri> //引入model中的模型iris</include><include><uri>model://D435i</uri> //引入model中的模型D435i<pose>0.12 0 0.02 1.5708 0 1.5708</pose> //设置D435i模型的位置,分别是x y z yaw pitch roll</include><joint name="D435i_joint" type="fixed"> //创建相机关节,类型为固定关节<child>D435i::camera_link</child> //关节的子关节为D435i的camera_link关节(camera_link关节在D435i文件夹的.sdf文件中定义)<parent>iris::base_link</parent> //关节的父关节为iris的base_link关节<axis><xyz>0 0 0</xyz><limit><upper>0</upper><lower>0</lower></limit></axis></joint></model>
</sdf><?xml version="1.0"?>
<model><name>3DR Iris with D435i camera</name><version>1.0</version><sdf version='1.4'>iris_fusion.sdf</sdf><author><name>Amy Wagoner</name><email>arwagoner@gmail.com</email></author><description>This is a model of the 3DR Iris Quadrotor with an D435i camera. The original model has been created byThomas Gubler and is maintained by Lorenz Meier.</description>
</model>
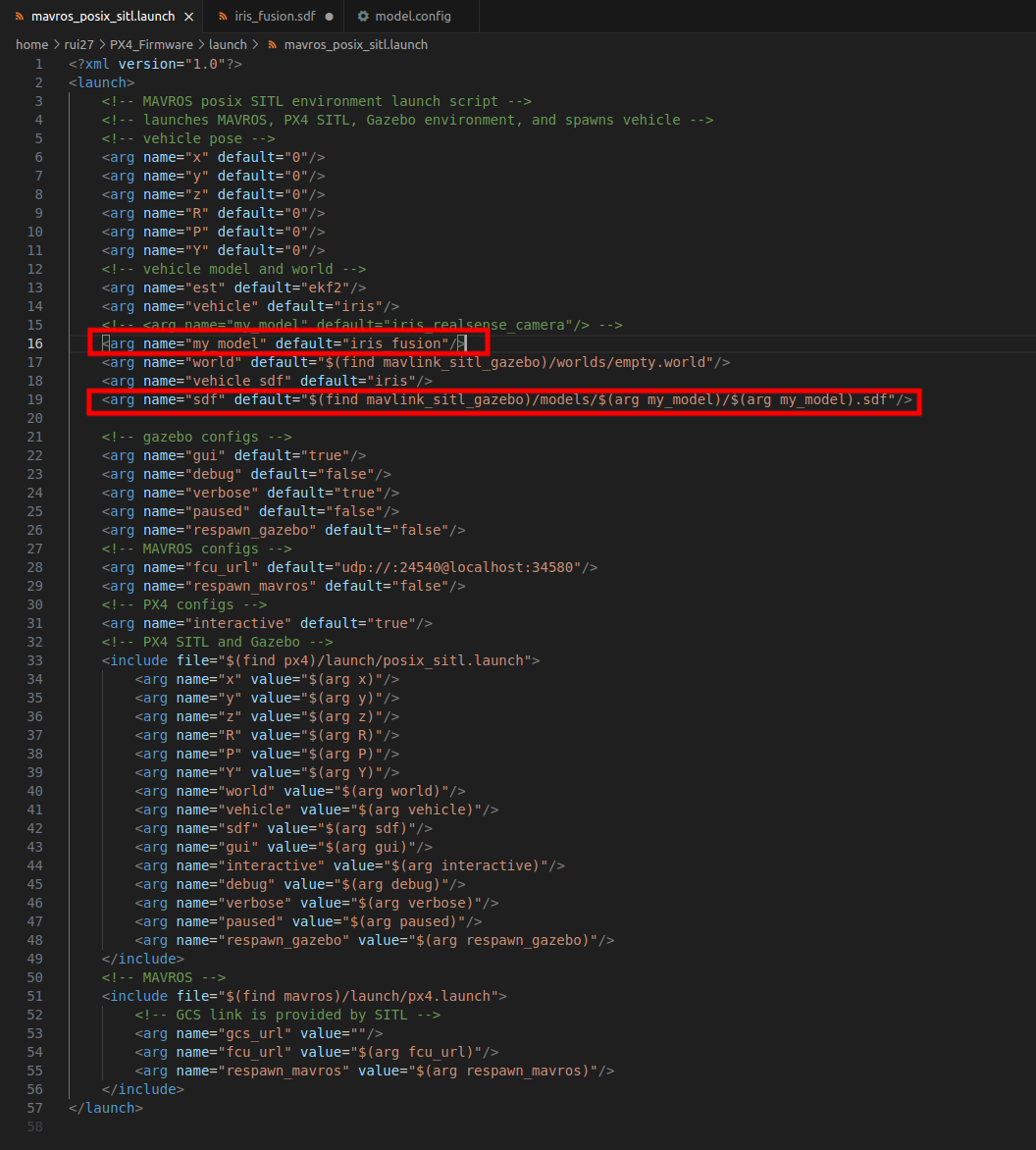
随后修改PX4_Firmware中的launch文件,打开mavros_posix_sitl.launch,添加或修改如下内容:
此时若直接修改并运行launch会报错找不到.config文件,这是因为还有必要的config文件不在D435i文件夹中,我们还需要将前面克隆的realsense_ros_gazebo文件夹整个丢进GAZEBO_MODEL_PATH中
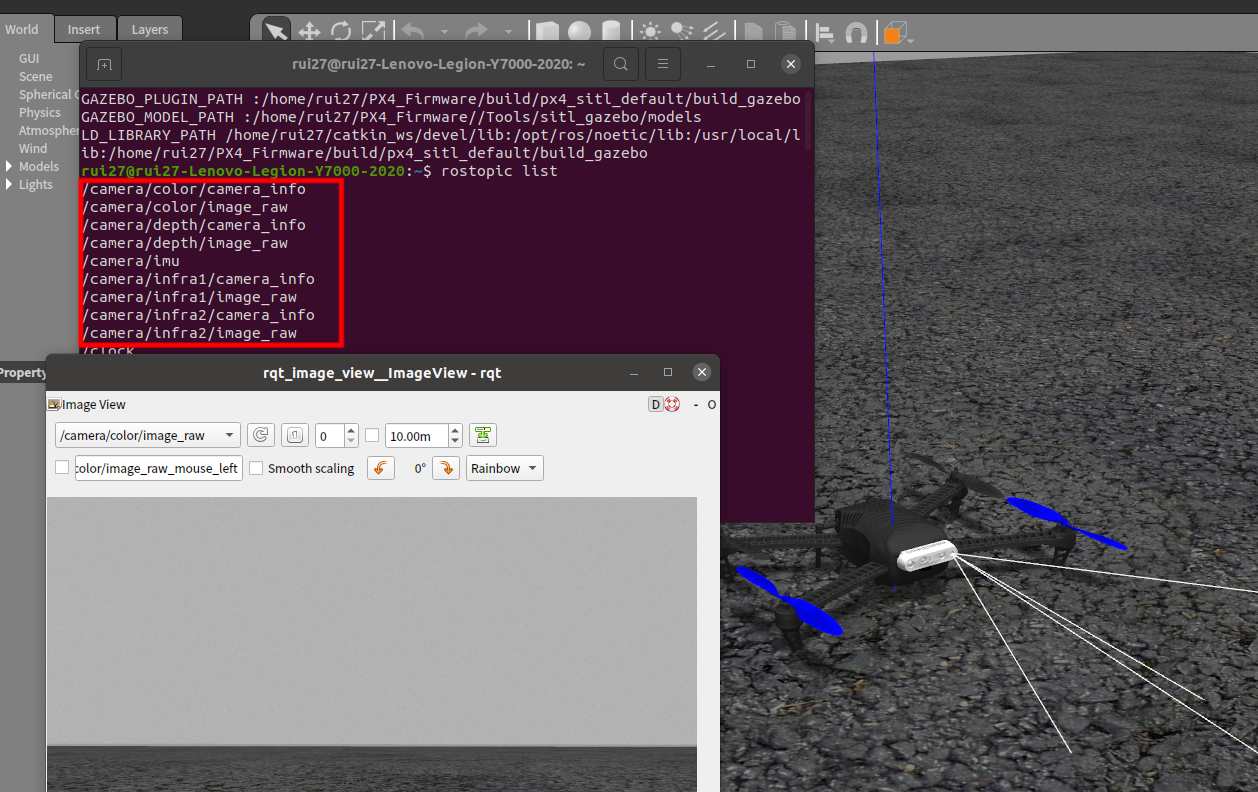
最后运行该launch文件,Gazebo启动并出现带有D435i的iris无人机,此时可以看到相机发布的图像话题,并能用rqt显示图像
roslaunch px4 mavros_posix_sitl.launch
rostopic list
rqt_image_view