顾名思义,最短路算法,就是求一个图中所有的点距某一个点的最短距离,常见的有Dijkstra算法、Bellman-Ford算法、Johnson算法与Floyd算法。
Dijkstra
Dijistra算法实际上是一种由贪心与动态规划结合的算法,我们每次都贪心地选择到某个点的最近距离,又动态地更新着距离数组d的数据,直到完成对每一个点的操作。
但它也存在着缺陷,Dijkstra算法并不能处理负权图,因为这与其核心算法贪心相悖,因为如果存在负权边,按照贪心的写法就只能选择那条负权边,从而陷入死循环。
- 算法拆解
为了减少时间复杂度,我们把每一个父节点及其邻接表存入堆(小根堆)中,这样堆顶的元素就始终是该节点的子节点中权值最小的,为了实现小根堆,我们还需要重载小于号,代码如下:
struct Edge
{int x, w;//x是节点的编号,w是节点的权值bool operator < (const Edge&u)const{if(w != u.w) return w > u.w;//由于堆是利用小于号来实现大根堆(堆顶是最大值)的,所以我们只要更改小于号的规则,就能实现小根堆。}
}
为了避免重复操作,我们可以创建一个bool数组(或创建bitset,两者的作用在这儿是相同的),来标记已操作过的父节点;由于我们要得到的是最短路,为了避免出错,我们应该把d距离数组的值都初始化为当前使用的数据类型的最大值。完成以上操作后,我们就该对每个点进行操作了,完成操作后,再把当前节点的子节点存入堆中,以便实现对所有点的操作,示例代码如下:
void dijkstra(int st)
{for(int i = 1;i <= n;i++) d[i] = inf;//首先对d(每个点到起点的距离)数组进行初始化,其中inf是long long的近似最大值priority_queue<Edge> pq;pg.push({st, d[st] = 0});bitset<N> vis;//N,是点个数的上限while(pq.size()){int x = pq.top(),pq.pop();if(vis[x])continue;//操作过的节点,直接跳过for(auto &t : g[x]){int v = t.x, w = t.w;if(d[x] + w < d[v]){d[v] = d[x] + w;//找到更小的路径,更新pq.push({v,d[v]});//把子节点放入堆中}}}//如果堆非空,也就是说没有遍历所有点,就继续操作
}
例题1 星码Starrycoding P70 【模板】最短路(2)
本题是dijkstra算法的模版题,依照上文所说的思路写出代码即可,代码如下:
#include<bits/stdc++.h>
using namespace std;
using ll = long long;
const int N = 2e5 + 5;
const ll inf = 2e18;
int n, m;
ll d[N];
//用一个数组存储各个点到起点的距离
struct edge
{ll x, w;//x是某一个点所连接的点,w是权值bool operator < (const edge& u)const{if (w != u.w)return w > u.w;//堆默认是以<实现大根堆的,所以我们用>就可以实现小根堆}//重载<以实现小根堆,最短路的核心思想就是贪心和dp,既然求最短路,那么就需要选权值(距离)最小的
};
vector<edge> g[N];
//创建邻接表,存储每个点的子节点与每条边的权值
void dijkstra(int st)
{for (int i = 1; i <= n; i++) d[i] = inf;//首先将所有节点距起点的距离为(ll的)最大值,默认除起点外的点都无法到达priority_queue<edge>pq;//使用堆(小根堆)来实现权值最小点的快速寻找bitset<N>vis;//标记以处理过的父节点pq.push({ st,d[st] = 0 });//把起点放入堆中while (pq.size()){int x = pq.top().x; pq.pop();if (vis[x])continue;//跳过已经入堆的节点,防止重复vis[x] = true;//将该点标记为已走过for (const auto &t : g[x]){int v = t.x, w = t.w;if (d[x] + w < d[v]){d[v] = d[x] + w;pq.push(edge{ v,d[v] });}//遍历x这一点的所有子节点,如果有一个子节点可以让距离缩短,那么就更新距离,并把更新后的点放入堆中}}//如果堆非空就一直进行
}void solve()
{cin >> n >> m;for (int i = 1; i <= m; i++){ll x, y, w; cin >> x >> y >> w;g[x].push_back({ y,w });}dijkstra(1);cout << (d[n] == inf ? -1 : d[n]) << "\n";//如果最后一个点的值仍是最大值,说明不存在从1到n的最短路径
}int main()
{ios::sync_with_stdio(false), cin.tie(0), cout.tie(0);int _ = 1;while (_--) solve();return 0;
}
例题2 星码Starrycoding P113 小鱼吃虾米
本题仍是一个明显的最短路问题,但不一样的是我们需要求的是其它点到某一点的距离,与dijkstra算法正好想反,如果直接对每一点进行求解,时间复杂度将会非常之大,所以我们不妨把思路逆转过来,我们仍然把它看做一个从某一点到其它所有点的最短距离的题,为了做到这一点,我们需要把图的指向全都翻转过来(只需要在读入邻接表时倒转一下即可),代码如下。
#include<bits/stdc++.h>
using namespace std;
using ll = long long;
const ll N = 1e4+5,inf = LLONG_MAX;
ll v[N],d[N],n,m,k;struct Edge
{ll x,w;bool operator < (const Edge&u)const{if(w != u.w)return w > u.w;}
};//重载小于号,实现小根堆
vector<Edge> g[N];
//邻接表 void dijkstra(int st)
{for(int i = 1;i<=n;i++)d[i] = inf;bitset<N> vis;priority_queue<Edge> pq;pq.push({st,d[st] = 0});while(pq.size()){int x = pq.top().x;pq.pop();if(vis[x])continue;vis[x] = true;for(auto &t : g[x]){int v = t.x,w = t.w;if(d[x] + w < d[v]){d[v] = d[x] + w;pq.push({v,d[v]});}}}
}void solve()
{cin >> n >> m >> k;for(int i = 1;i<=k;i++)cin >> v[i];for(int i = 1;i<=m;i++) g[i].clear();//测试样例不止一个,所以别忘了清空邻接表。 while(m--){int a, b, c;cin >> a >> b >> c;g[b].push_back({a,c});}dijkstra(1);ll ans = inf;for(int i = 1;i <= k;i++) ans = min(ans, d[v[i]]);//求所有路径中的最小值 cout << (ans==inf ? -1 : ans) << "\n";
}int main()
{ios::sync_with_stdio(false),cin.tie(0),cout.tie(0);int _;cin >> _;while(_--)solve();return 0;
}Bellman-Ford
相比于Dijkstra算法,Bellman-Ford算法的最大优点就是能够处理存在负权的图,它能够在求得最短路的同时检测出负权环。
Bellman-Ford算法的核心思想就是“松弛”,比如下面这样。
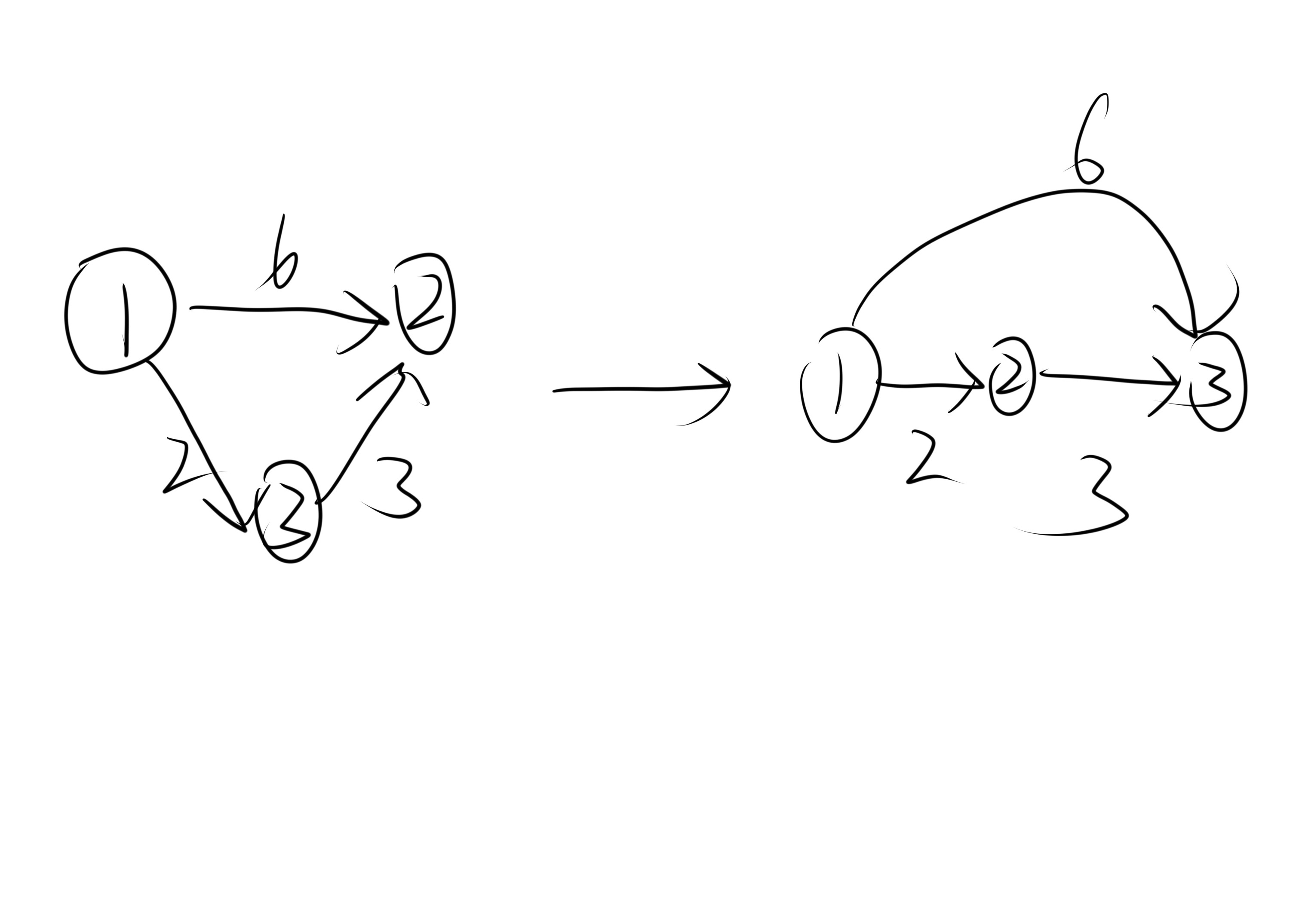
所以,如果一个图如果在进行n-1次松弛操作后仍然可以进行松弛操作,说明该图一定存在负权环,代码实现如下:
星码Starrycoding P97
#include<bits/stdc++.h>
using namespace std;
using ll = long long;
const ll N = 1e4+5,inf = LLONG_MAX;
ll d[N], n, m;
//d数组就是每个点到起点的距离
struct Edge
{ll x,w;
};
vector<Edge> g[N];
//存储子节点以及其权值的邻接表
void solve()
{cin >> n >> m;while(m--){int x,y,z;cin >> x >> y >> z;g[x].push_back({y,z});//读取邻接表 }for(int i = 2;i <= n;i++)d[i] = inf;//将除第一个点外的其它点到第一个点的距离设为ll的最大值,以防止后续出错 bool circle = false;//负权的判断 for(int i = 1;i<=n;i++){circle = false;for(int j = 1;j<=n;j++){for(const auto &t : g[j]){int u = t.x,w = t.w;if(d[j] + w < d[u]){d[u] = d[j] + w;circle = true;}}}}//有n个点的图有n-1条边,所以如果无负权环,在n-1次松弛操作后,就不能再进行松弛操作了。 if(circle) cout << -1 <<"\n";else {for(int i = 1;i<=n;i++)cout << d[i] <<" ";cout << "\n";}
}int main()
{ios::sync_with_stdio(false),cin.tie(0),cout.tie(0);int _ = 1;while(_--)solve();return 0;
}松弛过程中的暴力枚举会导致时间复杂度较高,所以我们可以对该算法进行队列优化,以便显著改善某些场景下的时间复杂度。
SPFA算法(Bellman-Ford算法的路径优化版本)
SPFA算法可以显著改善某些只能用Bellman-Ford算法解决的问题大的时间复杂度,与Dijkstra算法的优化版本类似,SPFA算法是利用队列来减少冗余操作的,只处理操作过的节点的子节点。代码实现如下:
#include<bits/stdc++.h>
using namespace std;
using ll = long long;
const int N = 1e5+5,inf = 2e18;
ll n, m, d[N], cnt[N]; struct Edge
{int x,w;
};
vector<Edge> g[N];
//创建邻接表
bool SPFA(int st)
{for(int i = 2;i <= n;i++) d[i] = inf;queue<int> q;bitset<N> inq;//标记顶点是否在队列中 d[st] = 0;q.push(st);while(q.size()){int x = q.front();q.pop();inq[x] = false;//弹出队列元素,并将该节点标记为false; for(const auto &t : g[x]){int u = t.x,w = t.w;if(d[x]+w<d[u]){d[u] = d[x] + w;cnt[u] = cnt[x] + 1;//cnt是记录到i的路径边数,如果要经过超过n-1条边(n个顶点,n-1条边)才能到达,说明存在负权环 if(cnt[u]>=n) return false;if(!inq[u])q.push(u),inq[u] = true;//将未操作过的节点放入队列中 }} //遍历该节点的子节点并进行松弛操作 }return true;
}
//SPFA算法实现返回true说明无负权环,否则有负权环
void solve()
{cin >> n >> m;while(m--){int x, y, z;cin >> x >> y >> z;g[x].push_back({y, z});}if(SPFA(1)) for(int i = 1;i <= n;i++) cout << d[i] << " ";else cout << -1 << " ";}int main()
{ios::sync_with_stdio(false),cin.tie(0),cout.tie(0);int _ = 1;while(_--)solve();return 0;
}Johnson最短路径
Floyd
Floyd算法与Dijkstra算法的不同之处就在于Floyd算法可以求任意两点间的最短路,相比Dijkstra算法更加灵活。