RPN(Region Proposal Network)网络是目标检测算法 Faster R - CNN 中的关键组件,它的提出有效解决了传统目标检测方法中区域建议生成速度慢的问题。下面为你详细介绍:
结构:
共享卷积层:通常使用预训练的卷积神经网络(如 VGG、ResNet 等)对输入图像进行特征提取,得到特征图。这个特征图会作为后续 RPN 网络的输入,共享卷积层的作用是提取图像的通用特征,减少后续网络的计算量。
滑动窗口:在特征图上使用一个固定大小的滑动窗口进行滑动,每个窗口位置可以看作是一个潜在的目标候选区域中心。例如,在一个3×3的滑动窗口中,窗口中心对应着图像中的一个位置。
锚点(Anchors):对于每个滑动窗口位置,会预设一组不同尺度和宽高比的锚点。这些锚点是一系列固定大小和形状的矩形框,用于表示可能的目标边界框。常见的尺度和宽高比组合有多种,例如尺度可以是
128×128、256×25、512×512,宽高比可以是1:1、1:2、2:1等。
分类层和回归层:
分类层:判断每个锚点对应的区域是前景(包含目标)还是背景,通常使用一个二分类器(如 Softmax 分类器)来实现。
回归层:对锚点的位置和大小进行微调,使其更准确地拟合目标的真实边界框。回归层输出的是锚点的偏移量,通过这些偏移量可以对锚点进行修正,得到更精确的候选区域。
工作流程
特征提取:将输入图像传入共享卷积层,得到特征图。
锚点生成:在特征图上的每个滑动窗口位置,生成一组预设的锚点。
特征提取与预测:对每个锚点对应的特征进行提取,并分别输入到分类层和回归层,得到每个锚点的前景 / 背景分类概率和位置偏移量。
候选区域生成:根据分类层的输出,筛选出前景概率较高的锚点,并使用回归层输出的偏移量对这些锚点进行修正,得到最终的候选区域。
非极大值抑制(NMS):对生成的候选区域进行非极大值抑制,去除那些重叠度较高的冗余候选区域,保留得分较高且不重叠的候选区域作为最终的目标建议区域。
作用
提高目标检测效率:RPN 网络能够快速生成高质量的目标候选区域,避免了传统方法中使用选择性搜索等算法生成候选区域的高计算成本,大大提高了目标检测的速度。
与检测网络共享特征:RPN 网络和后续的检测网络(如 Fast R - CNN 中的分类和回归网络)共享卷积层提取的特征,减少了重复计算,进一步提高了整体检测效率。
提高检测精度:通过使用锚点机制和回归微调,RPN 网络能够生成更准确的目标候选区域,为后续的目标分类和定位提供更好的基础,从而提高了目标检测的精度。
RPN 网络
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/903614.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

浅说线性差分和树上差分
目录线性差分正常思路差分思路二维差分的定义二维差分的解释例题1 地毯树上差分引入点差分例题1——wwx的出玩分析与解答例题2——松鼠的新家分析与解答边差分例题1——边差分模版分析与解答例题2——运输计划分析与解答
线性差分
当我们这里有\(n\)个数,现在我要对其中一段进…
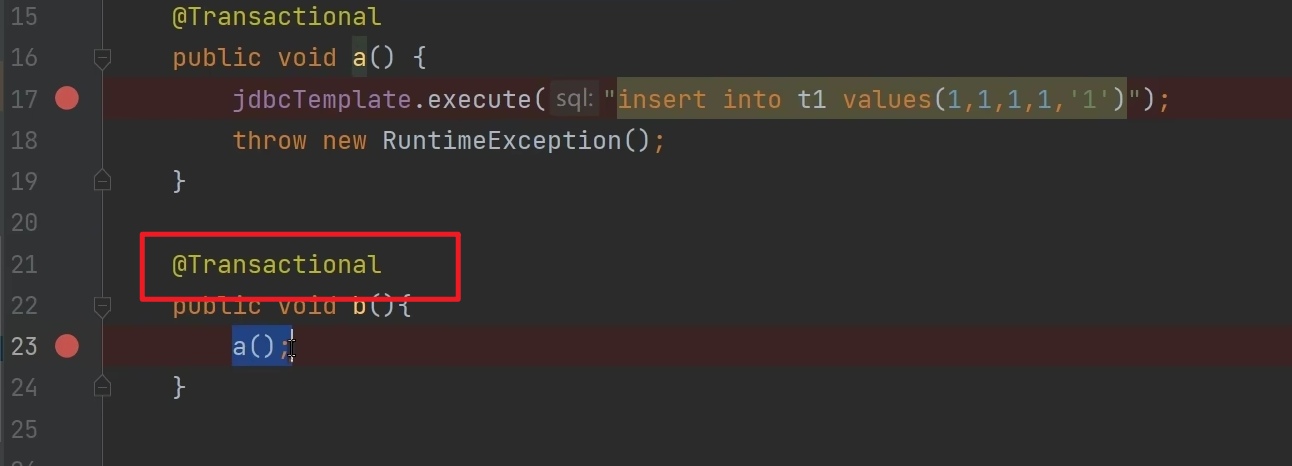
Spring 事务失效
场景1:代码:执行结果:异常抛出,但是数据没有回滚。
代理对象调用 b() 方法 没有开启事务:普通对象调用a() 方法开启事务:在b() 方法上加入事务注解,开启事务就没问题:本文来自博客园,作者:chuangzhou,转载请注明原文链接:https://www.cnblogs.com/czzz/p/18787133
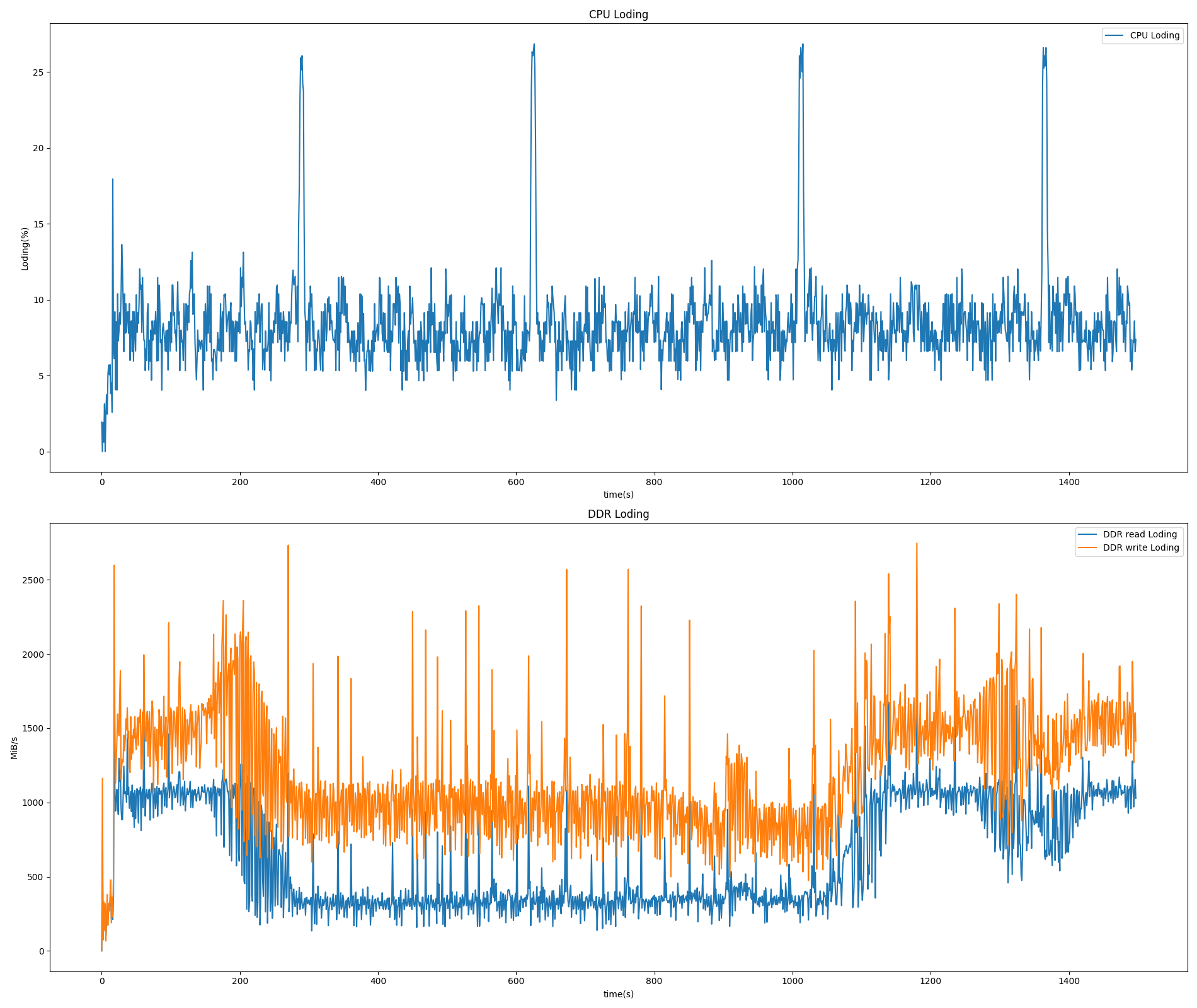
征程 6X CAMSYS 性能测试方案介绍
1.性能测试方法原理
CAMSYS 其性能指标主要包括:帧率、延迟,以及系统的 DDR 带宽、CPU 占用率等。
对于帧率、延迟,通过在驱动中创建 trace event,分别记录通路上的每个 IP,每帧开始处理(frame_start)和结束处理(frame_end)的时间戳信息和帧信息,来实现帧率计算和延迟…

day7 刷牛客华为机试题+学java
https://www.nowcoder.com/exam/oj/ta?page=1&tpId=37&type=37
字符串
第一题:第二题:
省行版:逻辑版:java网课学习:
多态调用成员变量,编译看左边,运行也看左边。调用成员方法时,编译看左边,运行看右边。if(a instanceof Dog d)
导包final 修饰引用类型地址…
【Docker】MySQL、Reids、Mongodb、Nacos、RabitMQ安装指南
1 docker的下载
建议通过 火绒应用商店 或者 联想应用商店 下载
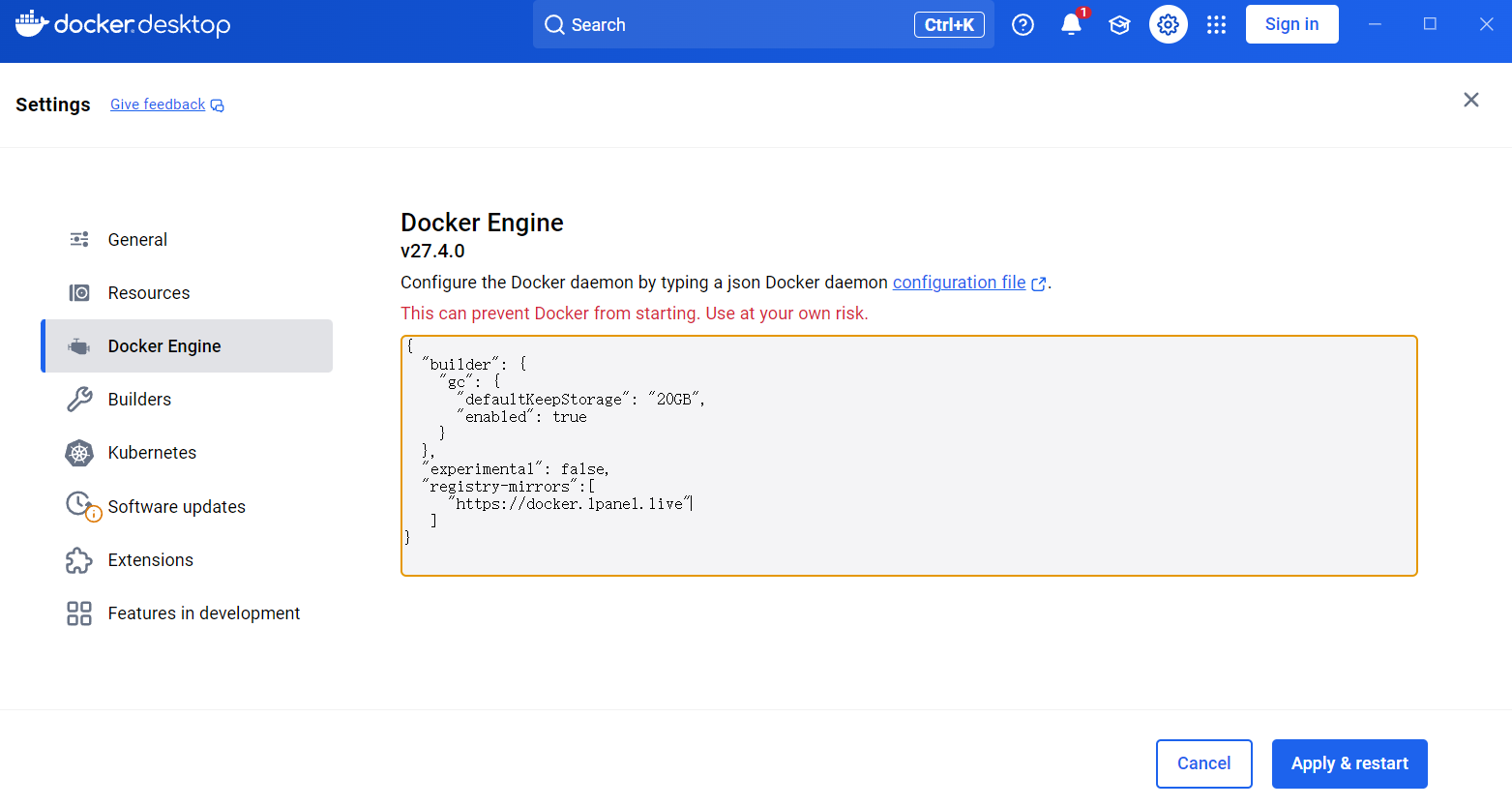
2 配置Docker
配置镜像站 https://docker.1panel.live
{"builder": {"gc": {"defaultKeepStorage": "20GB","enabled": true}},"experimental": fa…

Web前端入门第 22 问:CSS 选择器一览
HTML 在语法上并无大小限制,所以其结构可以浩瀚无边,CSS 选择器的作用则是在这些复杂的 HTML 结构中进行元素定位。
示例代码
记住此代码,后面所有的 css 选择器都是基于此代码。
注意:代码中存在两个一样的 id="p1" 元素,仅为了演示效果,正常编码中请保证 id …

曼哈顿距离和切比雪夫距离
曼哈顿距离(Manhattan Distance)
解释:只能横着或竖着走,坐标上两点的距离
假设存在两点 \(A(x_1, y_1)\) \(B(x_2, y_2)\)
\(dis(A, B) = |x_1 - x_2| + |y_1 - y_2|\)对于上方求曼哈顿距离的式子,有四种情况
\(
\begin{cases}
x_1 > x_2 & y_1 > y_2 & {…
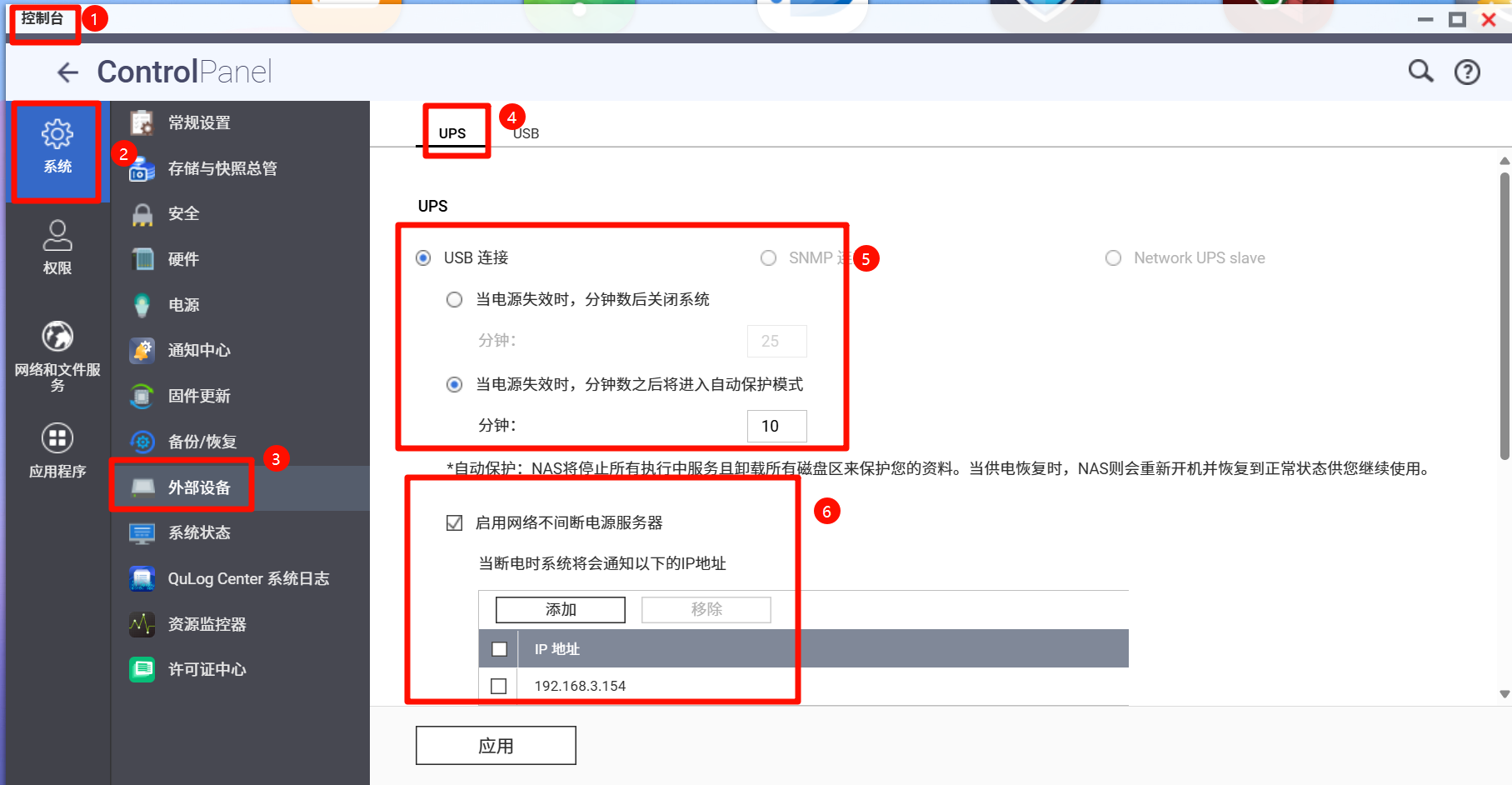
如何设置家用威联通 NAS UPS 断电后自动关机并通知其他设备?
场景📝备注:
求轻喷, 求放过. 😅
我真的是个理线方面的白痴. 这已经是我的极限了. 😂我的家庭实验室 Homelab 服务器集群配置如下.上半部分之前已经介绍过了, 这里就不再赘述了. 今天重点介绍介绍 UPS 和 NAS 部分.1台 UPS, 型号为 APC Back-UPS 650. 插座插着: NAS 和 插…
![[扫描线] 数据结构测试(2025.3.22)](https://nh.51goc.com/static/problemImage/26242/1742616827806.png/)
[扫描线] 数据结构测试(2025.3.22)
暴力大赛,赛时暴力打满喜提80pts,可惜T1没想到暴力。
难度:T2<T1<T3.T1
第1题 团队 查看测评数据信息有n个工人,第i个工人的能力是v[i], 他只与能力在L[i]到R[i]之间的人在一起工作,问最多能选出多少人在一起工作。输入格式第一行,一个整数n, 1 <= n <…
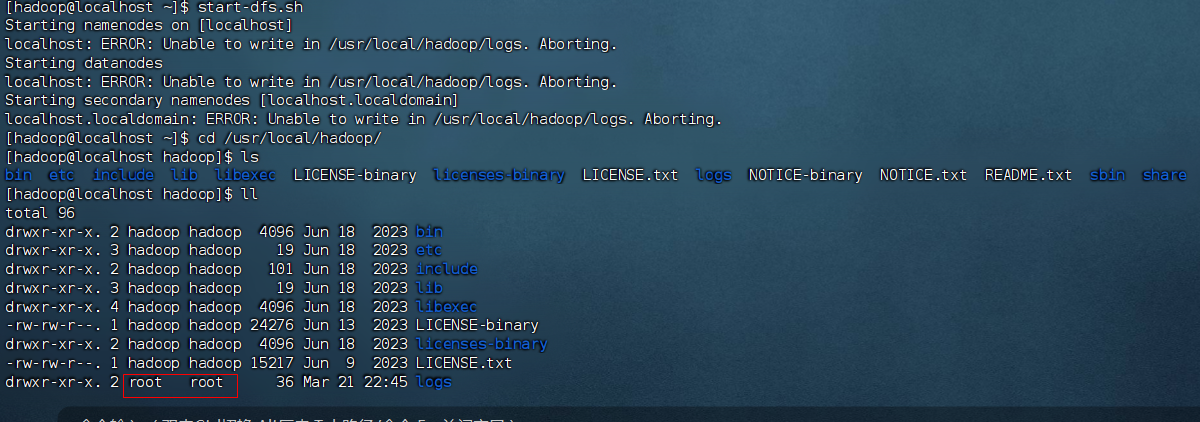
centOS 上部署hadoop+mysql+hive 服务之hadoop安装
以下安装的hadoop版本是3.3.6 ,由于hadoop是运行于java环境,因此,需要提前安装java jdk并配置环境变量。
jdk的安装及配置:
jdk8 国内下载路径:https://repo.huaweicloud.com/java/jdk/8u202-b08/ 可根据实际需要选择对应的jdk版本
1、下载jdkwget https://repo.huaweicl…
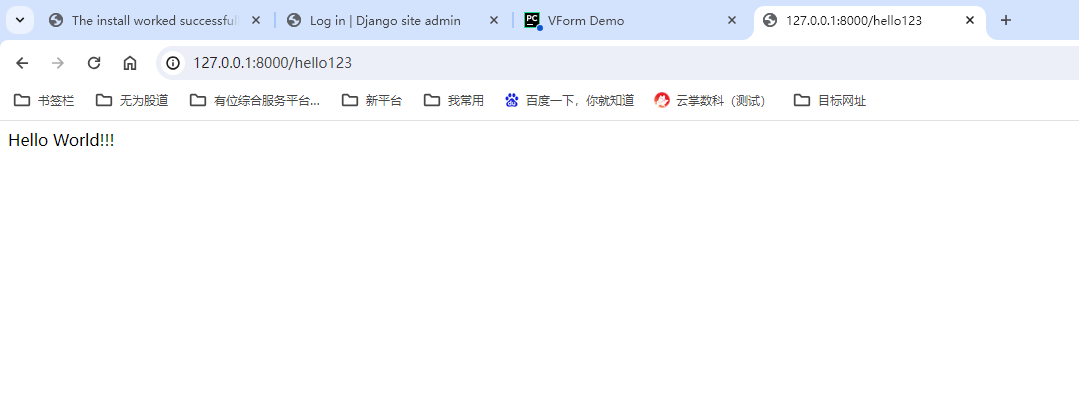
创建django视图和路由
第一个视图
from django.shortcuts import render
from django.http import HttpResponse# Create your views here.
def hello(request):msg = Hello World!!!return HttpResponse(msg)第一个路由
from django.urls import path
from .views import hellourlpatterns = [path(…