AVM(Around View Monitor),中文:全景环视系统。
在自动驾驶领域,AVM属于自动泊车系统的一部分,是一种实用性极高、可大幅提升用户体验和驾驶安全性的功能。利用车身四周摄像头,拼接出以车身为中心的360°环视画面,直接鸟瞰车身周边情况。支持多种车型,具有4路、6路、或前3/后3等多种方案可供选择。同时,算法具有平衡不同摄像头画面亮度、无视摄像头安装倾角的能力,使得最终呈现的环视画面亮度统一,效果更真实。
传统的基于图像的倒车影像系统只在车尾安装摄像头,只能覆盖车尾周围有限的区域,而车辆周围和车头的盲区无疑增加了安全驾驶的隐患,在狭隘拥堵的市区和停车场容易出现碰撞和刮蹭事件。为扩大驾驶员视野,360度全景环视系统能够与视觉传感器相互协同配合,形成全车周围的一整套的视频图像,显示在中控台的屏幕上,让驾驶员清楚查看车辆周边是否存在行人、移动物体、非机动车、障碍物并了解其相对方位(转向、停车)与距离,帮助驾驶员轻松停泊车辆。不仅非常直观,而且不存在任何盲点,可以提高驾驶员从容操控车辆泊车入位或通过复杂路面,有效减少刮蹭、碰撞、陷落等事故的发生。
鱼眼相机畸变模型
我们知道普通相机和广角相机的投影方式一般为透视投影,即通过三角形相似原理,将相机坐标系下三维世界中的物体投影到平面上,这是基于理想的透视投影模型(无畸变)。但实际情况是我们得到的最终图像与理想的透视投影模型有一些区别,即径向畸变(桶形、枕型)、切向畸变。因此相机标定中都会对畸变做矫正。鱼眼相机的投影方式有很多种假设,例如等距投影、等立体角投影、正交投影、体视投影、线性投影。但是真实的鱼眼相机镜头并不完全遵循上述的这些模型假设。因此Kannala-Brandt提出了一种一般形式的估计,适用于不同类型的鱼眼相机: 这个也是纳入opencv中的鱼眼相机畸变模型。
这个也是纳入opencv中的鱼眼相机畸变模型。
下图是通过标定算法得出的鱼眼相机的参数:
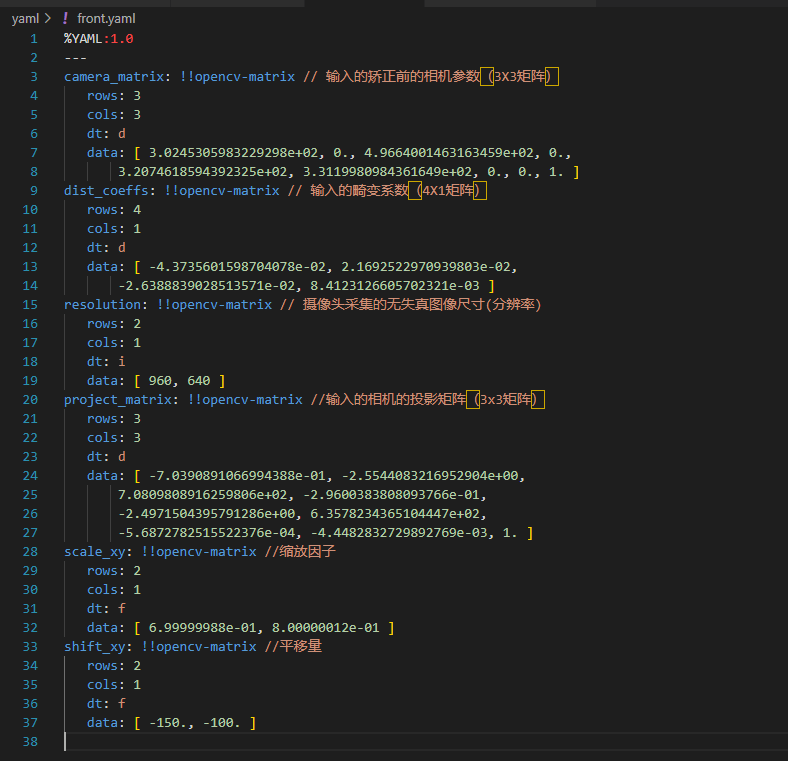
基于厂家畸变表的鱼眼图像去畸变
相机厂家都有专业的光学工程师,大厂提供的畸变表通常情况下比较准确。因此我们根据厂家提供的畸变表录入上图需要的矩阵参数,即可实现鱼眼图像的去畸变效果。