CloudCompare 二次开发(9)——半径滤波

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/98409.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
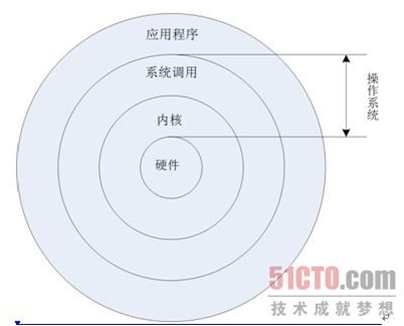
Linux系统的安装
文章目录 1 Linux介绍1.1 Linux是什么1.2 Linux的特点1.3 Linux的应用1.4 Linux的发行版本1.5 Linux的Shell 2 Linux安装2.1 安装方式2.2 什么是VMware2.3 VMware主要功能2.4 什么是CentOS2.5 VMware与CentOS与Linux的关系2.6 VMware安装CentOS的步骤 1 Linux介绍
1.1 Linux是…
面试题查漏补缺 i++和 ++ i哪个效率更高
i 和 i 哪个效率更高? 在这里声明,简单地比较前缀自增运算符和后缀自增运算符的效率是片面的,因为存在很多因素影响这个问题的答案。首先考虑内建数据类型的情况:如果自增运算表达式的结果没有被使用,而是仅仅简单地用于增加一员…
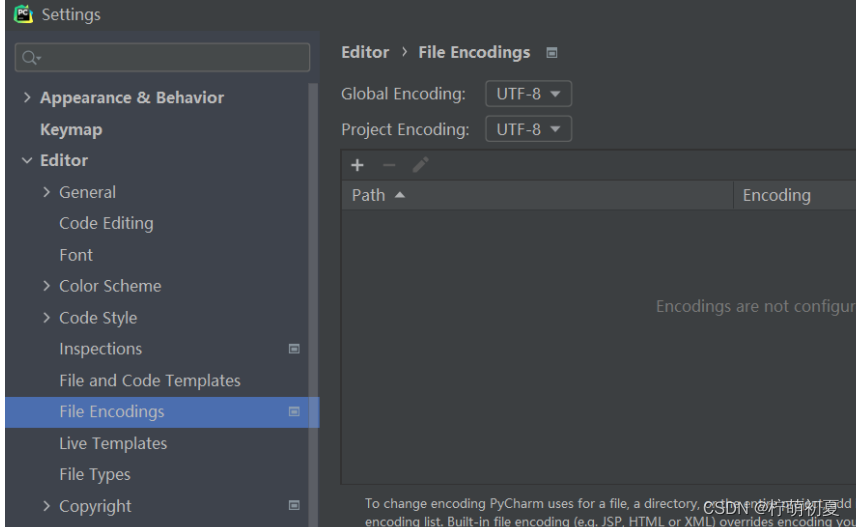
PyQt5报错Process finished with exit code -1073740791 (0xC0000409)
点击按钮之后,就直接退出程序,控制台出现一个提示:解决办法:
在PyCharm中打开Run菜单,找到Edit Configurations进入,勾选Emulate terminal in output console即可。 然后再运行一下程序,就可以…

爬虫项目(二):中国大学排名
《Python网络爬虫入门到实战》京东购买地址,这里讲解了大量的基础知识和实战,由本人编著:https://item.jd.com/14049708.html配套代码仓库地址:https://github.com/sfvsfv/Crawer文章目录 分析第一步:获取源码分析第一…
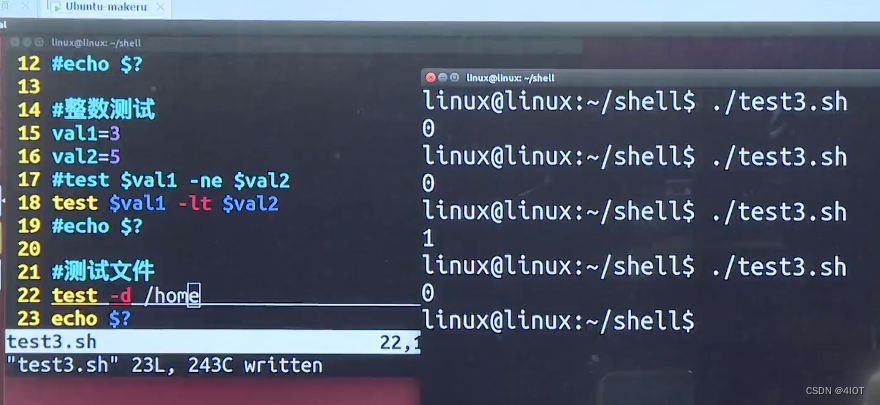
lv3 嵌入式开发-6 linux shell脚本编程(概念、变量、语句)
1 Shell脚本概述
1.1Shell脚本概述 Shell脚本是利用 shell 的功能所写的一个程序。这个程序是使用纯文本文件,将一些 shell 的语法与命令(含外部命令)写在里面,搭配正则表达式、管道命令与数据流重定向等功能 1.2Shell脚本编写流…

权限提升-Linux提权-环境变量文件配合SUID提权
LINUX系统提权项目介绍 一个综合类探针: Linux:https://github.com/liamg/traitor 一个自动化提权: Linux:https://github.com/AlessandroZ/BeRoot 两个信息收集: Linux:https://github.com/rebootuser/Lin…
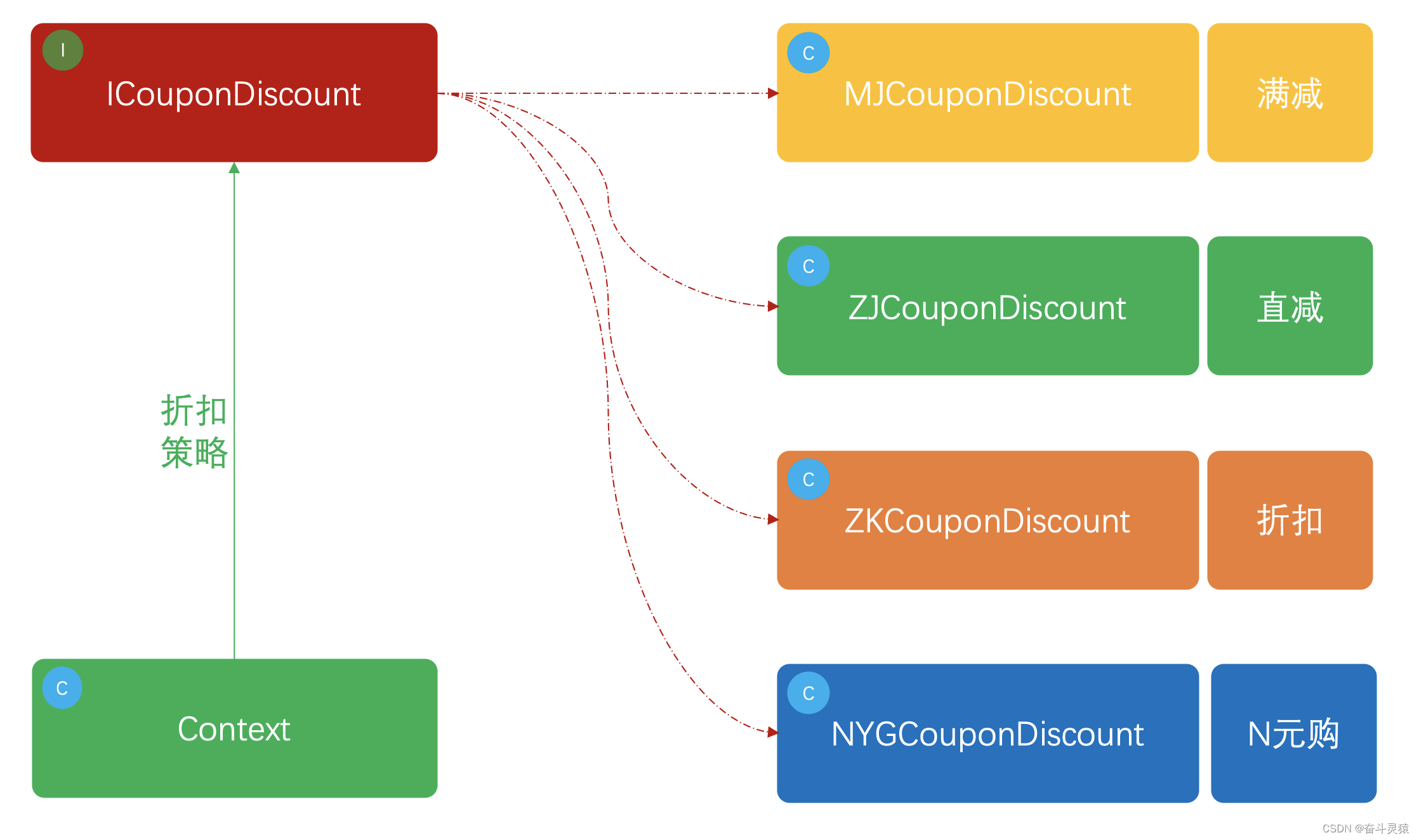
Java设计模式:四、行为型模式-08:策略模式
文章目录 一、定义:策略模式二、模拟场景:策略模式三、违背方案:策略模式3.0 引入依赖3.1 工程结构3.2 优惠券折扣计算类3.3 单元测试 四、改善代码:策略模式4.1 工程结构4.2 策略模式结构图4.3 优惠券折扣实现4.3.1 定义优惠券接…

【LeetCode】剑指 Offer <二刷>(7)
目录
题目:剑指 Offer 14- I. 剪绳子 - 力扣(LeetCode)
题目的接口:
解题思路:
代码:
过啦!!!
题目:剑指 Offer 14- II. 剪绳子 II - 力扣(…
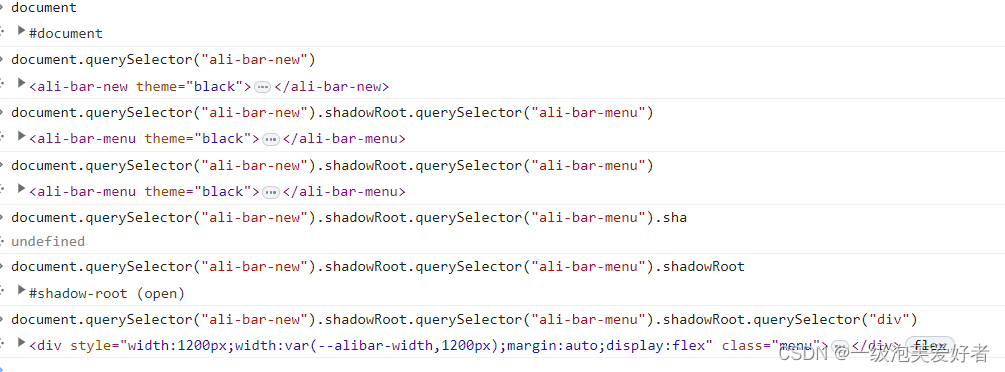
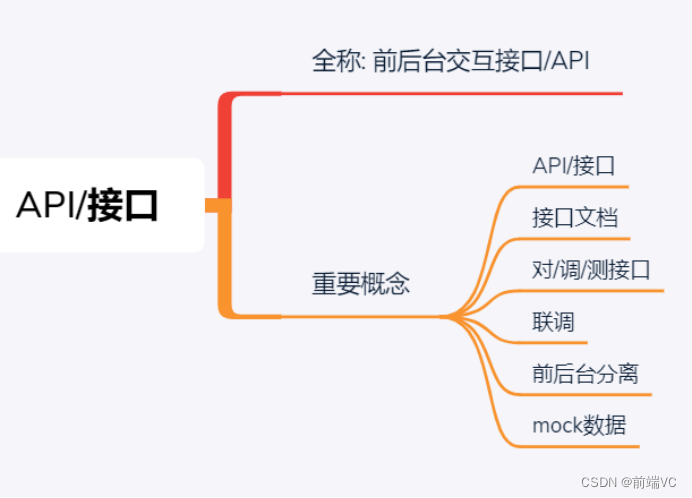
selenium中定位shadow-root,以及获取shadow-root内部的数据
通过shadow-root的父级定位到shadow-root,再通过语句进行操作 两种方法: 第一种,Python种JS实现 第二种,selenium实现
1.0 案例网站
参考某橘色网站
2.0 js语句定位
可在控制台进行测试 测试语句
document.querySelector("ali-ba…

uni-app点击复制指定内容(点击复制)
官方api
uni.setClipboardData(OBJECT) uni.setClipboardData({data: 要被复制的内容,success: function () {console.log(success);}
});

文件上传漏洞全面渗透姿势
0x00 文件上传场景
(本文档只做技术交流)
文件上传的场景真的随处可见,不加防范小心,容易造成漏洞,造成信息泄露,甚至更为严重的灾难。
比如某博客网站评论编辑模块,右上角就有支持上传图片的功能,提交带…