本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第7章 UART
本章目标
- 使用RASC快速操作UART
- 理解它的内部流程,改进程序
7.1 sci_uart模块的使用
7.1.1 使用RASC配置
本节的源码是“0701_UART”。
使用RASC配置UART时,需要进行两方面的配置:引脚配置、UART本身的配置。
首先进行引脚的配置,先打开原理图确认使用哪一个UART,比如引脚使用TXD0/RXD0、TXD1/RXD1、……中的哪一个,电路图如下,它使用TXD7/RXD7,记住这个编号7(TXDn/RXDn使用SCIn):

然后在RASC配置界面点击Pins页面,在左侧找到“Peripherals > Connectivity:SCI”,点击里面的SCI7,配置它工作于UART模式、选择引脚为P613、P614,如下图所示:

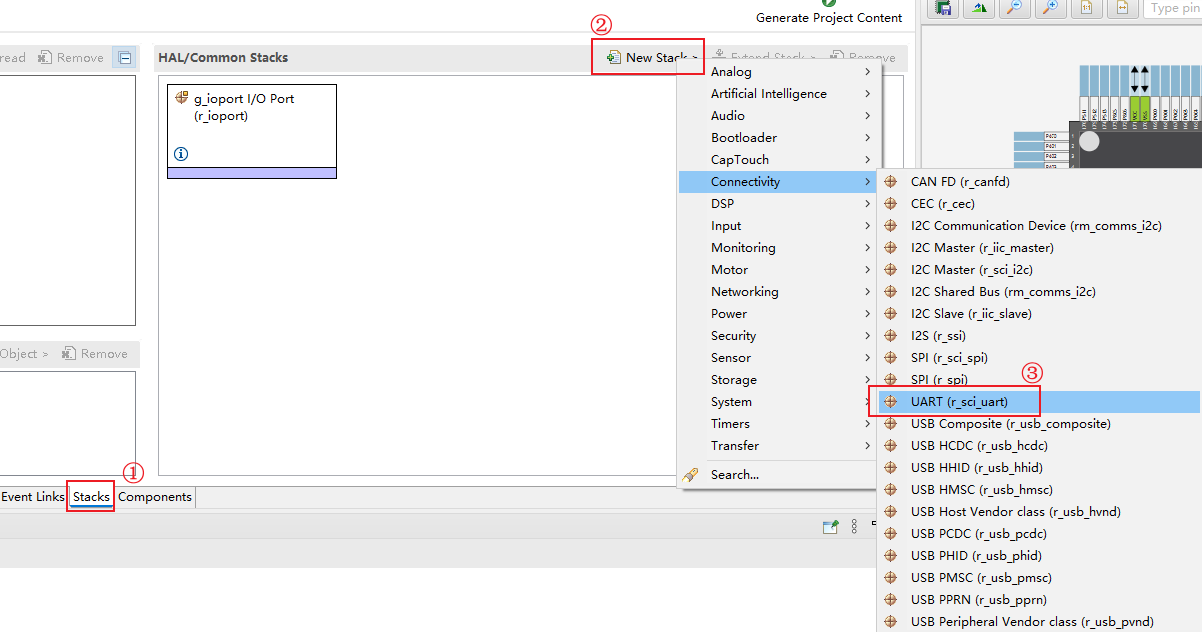
配置好引脚后,就需要配置UART本身了。点击Stack页面,点击“New Stack”然后找到“Connectivity > UART(r_sci_uart)”,添加新的Stack。如下图操作:
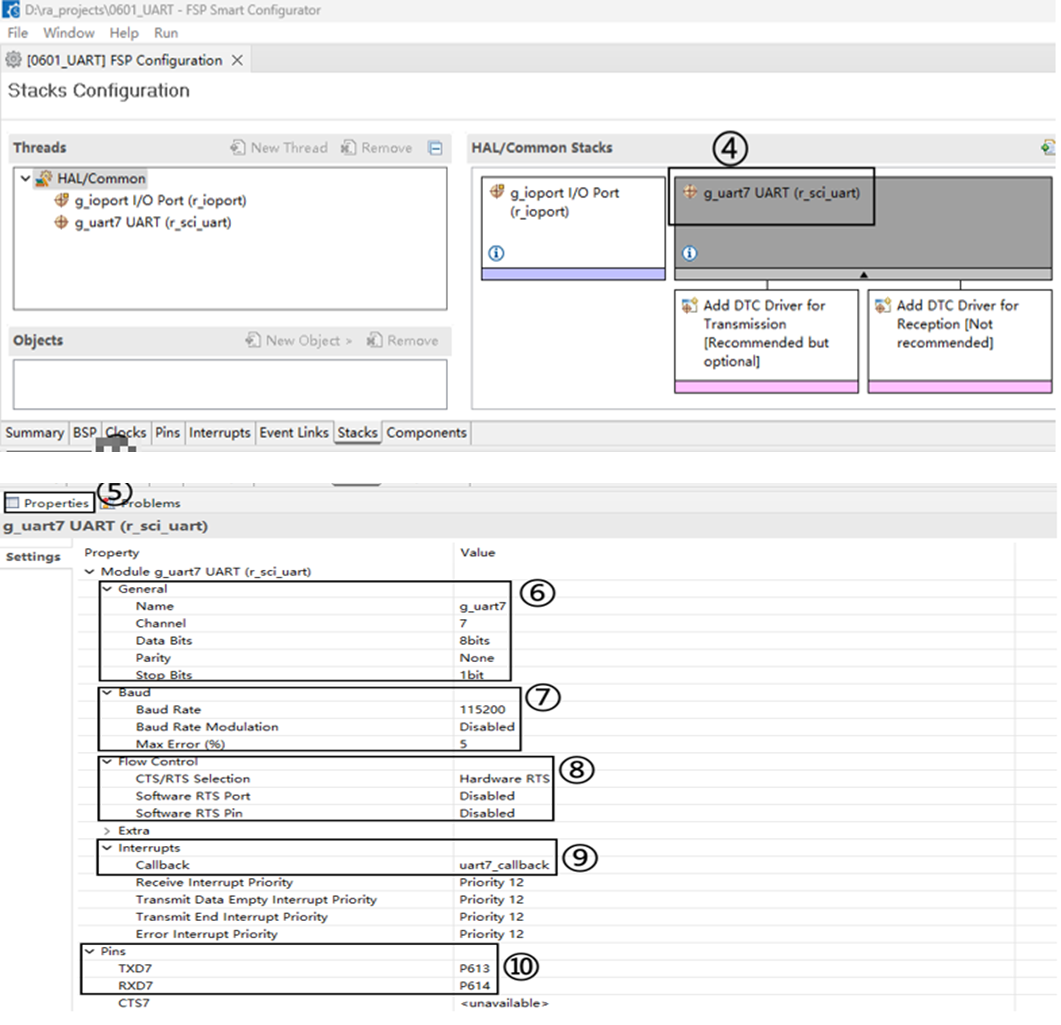
下一步要要配置新添加的r_sci_uart,如下图所示,先选中刚新建的r_sci_uart,点击“Properties”,然后设置:
-
在“General”下,设置变量名称,比如“g_uart7”;选择对应的UART通道,比如把Channel设置为7,然后设置数据位(Data Bits)为8、检验位(Parity)为None、停止位(Stop Bits)为1。
-
在“Baud”下,设置波特率(Baud Rate)为115200。
-
在“Flow Control”下,不要修改默认配置,如果修改了需要按图改回去
-
在“Interrupts”下,指定“Callback”为“uart7_callback”(这个函数需要我们实现)
-
在“Pins”下,确认TXD7、TXD6分别为P613、P614,跟前面在“Pins”页面的设置保持一致。
配置好引脚和UART后,点击右上角的“Generate Project Content”就会生成代码。
7.1.2 配置信息解读
使用RASC配置UART后,生成了引脚配置信息、UART本身的配置信息。
- 引脚配置信息
该信息会在0701_UART\ra_gen\pin_data.c文件里生成。
在RASC里配置的每一个引脚,都会生成一个ioport_pin_cfg_t数组项,里面的内容跟配置时选择的参数一致。代码如下:
const ioport_pin_cfg_t g_bsp_pin_cfg_data[] = {{.pin = BSP_IO_PORT_06_PIN_13,.pin_cfg = ((uint32_t) IOPORT_CFG_PERIPHERAL_PIN
| (uint32_t) IOPORT_PERIPHERAL_SCI1_3_5_7_9)},{.pin = BSP_IO_PORT_06_PIN_14,.pin_cfg = ((uint32_t) IOPORT_CFG_PERIPHERAL_PIN
| (uint32_t) IOPORT_PERIPHERAL_SCI1_3_5_7_9)},
};
-
第3~6行被用来配置P613;
-
第7~10行被用来配置P614。它们都被配置为“IOPORT_CFG_PERIPHERAL_PIN”,也就是要连接到芯片的其它模块(非GPIO);
连接到哪个模块呢?另一个参数“IOPORT_PERIPHERAL_SCI1_3_5_7_9)”表示它们被连接到SCI模块。
- UART配置信息
该信息会在0701_UART\ra_gen\hal_data.c文件里生成。
在RASC里指定了UART使用哪个SCI通道、指定了它的数据格式(数据位/校验位/停止位)、指定了波特率等信息,这些配置信息都被放入一个uart_cfg_t结构体,部分代码摘录如下:
const uart_cfg_t g_uart7_cfg =
{.channel = 7,.data_bits = UART_DATA_BITS_8,.parity = UART_PARITY_OFF,.stop_bits = UART_STOP_BITS_1,.p_callback = uart7_callback,......(省略内容)
}
结构体g_uart7_cfg里引用到了另一个结构体g_uart7_cfg_extend,里面含有时钟、FIFO、流量控制等信息,代码如下:
const sci_uart_extended_cfg_t g_uart7_cfg_extend =
{.clock = SCI_UART_CLOCK_INT,.rx_edge_start = SCI_UART_START_BIT_FALLING_EDGE,.noise_cancel = SCI_UART_NOISE_CANCELLATION_DISABLE,.rx_fifo_trigger = SCI_UART_RX_FIFO_TRIGGER_MAX,.p_baud_setting = &g_uart7_baud_setting,.flow_control = SCI_UART_FLOW_CONTROL_RTS,......(省略内容)
}
-
第04~06行指定了数据格式,第07行指定了用户提供的回调函函数。
-
第12~15行指定了时钟等硬件信息;
-
还在第16行引用了另一个结构体g_uart7_baud_setting。在RASC里配置了波特率为115200,RASC会计算出各个寄存器的值,存放在结构体g_uart7_baud_setting里,代码如下:
baud_setting_t g_uart7_baud_setting = {/* Baud rate calculated with 0.469% error. */ .semr_baudrate_bits_b.abcse = 0, .semr_baudrate_bits_b.abcs = 0, .semr_baudrate_bits_b.bgdm = 1, .cks = 0, .brr = 53, .mddr = (uint8_t) 256, .semr_baudrate_bits_b.brme = false };
7.1.3 API接口
在0701_UART\ra\fsp\inc\api\r_uart_api.h中定义了uart模块的接口,它定义了一个结构体类型uart_api_t,内容如下:
typedef struct st_uart_api
{fsp_err_t (* open)(uart_ctrl_t * const p_ctrl, uart_cfg_t const * const p_cfg);fsp_err_t (* read)(uart_ctrl_t * const p_ctrl, uint8_t * const p_dest, uint32_t const bytes);fsp_err_t (* write)(uart_ctrl_t * const p_ctrl, uint8_t const * const p_src, uint32_t const bytes);fsp_err_t (* baudSet)(uart_ctrl_t * const p_ctrl, void const * const p_baudrate_info);fsp_err_t (* infoGet)(uart_ctrl_t * const p_ctrl, uart_info_t * const p_info);fsp_err_t (* communicationAbort)(uart_ctrl_t * const p_ctrl, uart_dir_t communication_to_abort);fsp_err_t (* callbackSet)(uart_ctrl_t * const p_api_ctrl, void (* p_callback)(uart_callback_args_t *),void const * const p_context, uart_callback_args_t * const p_callback_memory);fsp_err_t (* close)(uart_ctrl_t * const p_ctrl);fsp_err_t (* readStop)(uart_ctrl_t * const p_ctrl, uint32_t * remaining_bytes);
} uart_api_t;
在具体的C文件中,需要实现一个uart_api_t结构体,比如在r_sci_uart.c里实现了如下结构体:
/* UART on SCI HAL API mapping for UART interface */
const uart_api_t g_uart_on_sci =
{.open = R_SCI_UART_Open,.close = R_SCI_UART_Close,.write = R_SCI_UART_Write,.read = R_SCI_UART_Read,.infoGet = R_SCI_UART_InfoGet,.baudSet = R_SCI_UART_BaudSet,.communicationAbort = R_SCI_UART_Abort,.callbackSet = R_SCI_UART_CallbackSet,.readStop = R_SCI_UART_ReadStop,
};
要使用UART收发数据时,可以调用结构体g_uart_on_sci里的各个函数指针,也可以直接调用r_sci_uart.c里实现的各个函数(比如R_SCI_UART_Open、R_SCI_UART_Read)。
7.1.4 中断回调函数
操作一个UART引脚时,要先打开它(open),open函数会配置UART;然后再调用read、write函数读、写串口。需要注意的是,sci_uart模块里的读、写函数,只是“启动”读、写功能,这些函数返回时并不表示读、写已经完成。后续的读、写操作是由中断函数实现的。在传输过程中,中断函数会调用回调函数来处理各种状态(传输完成?出错?)。
回调函数原型在0701_UART\ra_gen\hal_data.h中定义,如下:
void uart7_callback(uart_callback_args_t * p_args);
它的p_args参数是uart_callback_args_t结构体类型,如下:
typedef struct st_uart_callback_arg
{uint32_t channel; /// 哪一个UART通道uart_event_t event; /// event,什么原因/** 当event是UART_EVENT_RX_CHAR或UART_EVENT_ERR_PARITY时,data为刚接收到的字符* 当event是UART_EVENT_ERR_FRAMING或UART_EVENT_ERR_OVERFLOW时,data未被使用 */uint32_t data;void const * p_context; ///< Context provided to user during callback
} uart_callback_args_t;
回调函数被调用时,参数里的event表示原因,它是一个uart_event_t枚举类型,取值如下:
/** UART Event codes */
typedef enum e_sf_event
{UART_EVENT_RX_COMPLETE = (1UL << 0), /// 使用read函数启动接收后,接收完毕UART_EVENT_TX_COMPLETE = (1UL << 1), /// 发送完毕UART_EVENT_RX_CHAR = (1UL << 2), /// 未调用read启动接收,但是接收到了数据UART_EVENT_ERR_PARITY = (1UL << 3), /// 校验错误UART_EVENT_ERR_FRAMING = (1UL << 4), /// < Mode fault error eventUART_EVENT_ERR_OVERFLOW = (1UL << 5), /// FIFO溢出UART_EVENT_BREAK_DETECT = (1UL << 6), /// < Break detect error eventUART_EVENT_TX_DATA_EMPTY = (1UL << 7), /// 最后一个字节已经发送出去了,但是还没发送完毕
} uart_event_t;
- 对于接收,有2个event:UART_EVENT_RX_COMPLETE、UART_EVENT_RX_CHAR。前者被调用的时机是:调用read后接收到所有数据时;后者被调用的时机是:未调用read函数,但是接收到了数据。
- 对于发送,有2个event:UART_EVENT_TX_DATA_EMPTY、UART_EVENT_TX_COMPLETE。以发送2个字节的数据为例,前者被调用的时机是:第1个字节已经成功发送完毕,第2个字节已经被移入发送器但是还没发送完毕;后者被调用的时机是:这2个字节都发送完毕。前者先被调用,在“最后一个字节被发送,但是未发送完毕”时被调用;后者在“最后一个字节也完全发送完毕后”被调用。
对于普通的读写操作,可以在回调函数里设置状态标记,用来表示读、写是否已经完成。这样,使用read、write函数启动读、写操作后,就可以轮询这些状态以等待操作完成。示例代码在0701_UART\src\hal_entry.c文件中,如下:
static volatile int g_uart7_tx_complete = 0;
static volatile int g_uart7_rx_complete = 0;void uart7_callback(uart_callback_args_t * p_args)
{switch (p_args->event){case UART_EVENT_TX_COMPLETE:{g_uart7_tx_complete = 1;break;}case UART_EVENT_RX_COMPLETE:{g_uart7_rx_complete = 1;break;}default:{break;}}
}void uart7_wait_for_tx(void)
{while (!g_uart7_tx_complete);g_uart7_tx_complete = 0;
}
void uart7_wait_for_rx(void)
{while (!g_uart7_rx_complete);g_uart7_rx_complete = 0;
}
- 第8~12行,在回调函数里设置全局变量g_uart7_tx_complete,表示发送完毕。用户程序在调用write启动UART发送后,就可以调用第25行的uart7_wait_for_tx以等待发送完毕。
- 第13~17行,在回调函数里设置全局变量g_uart7_rx_complete,表示接收完毕。用户程序在调用read启动UART接收后,就可以调用第31行的uart7_wait_for_rx以等待接收完毕。
7.1.5 API接口用法
sci_uart模块的接口在文件0701_UART\ra\fsp\inc\api\r_uart_api.h中定义。
- 打开UART设备
此函数用于配置UART,并且标记转态为“已经打开”。函数原型:
fsp_err_t (* open)(uart_ctrl_t * const p_ctrl, uart_cfg_t const * const p_cfg);
此函数指针有两个参数,p_ctrl是一个uart_ctrl_t指针,它的定义如下:
typedef void uart_ctrl_t;
所以在r_uart_api.h文件里,p_ctrl实际上是一个void指针,它可以指向任意类型的数据类型,这是一种良好的编程思想:封装内部实现的细节。在r_sci_uart.h里,这个参数实际的类型是sci_uart_instance_ctrl_t结构体,定义如下:
/** UART instance control block. */
typedef struct st_sci_uart_instance_ctrl
{/* Parameters to control UART peripheral device */uint8_t fifo_depth; // FIFO深度uint8_t rx_transfer_in_progress; // 1表示当前正在处理一个“接收传输”……uint32_t open; // 表示状态,当前UART是否已经被打开、被配置……/* 发数据时的源数据buffer */uint8_t const * p_tx_src;/* 还有多少数据未发送 */uint32_t tx_src_bytes;/* 收数据时的目的buffer */uint8_t const * p_rx_dest;/* 还有多少数据未接收 */uint32_t rx_dest_bytes;/* 这个UART通道的寄存器基地址 */R_SCI0_Type * p_reg;void (* p_callback)(uart_callback_args_t *); // 回调函数……
} sci_uart_instance_ctrl_t;
结构体sci_uart_instance_ctrl_t的open成员被用来表示串口的状态,其他成员被用来实现读、写函数。比p_tx_src指向数据buffer,tx_src_bytes等于要发送的数据长度,每发送完n个数据中断函数里会把tx_src_bytes减去n,当中断函数发现tx_src_bytes等于0时,就会调用p_callback(它指向RASC里指定的回调函数)。
第二个参数p_cfg是一个uart_cfg_t结构体指针,在《7.1.2配置信息解读》里有详细描述。
- 关闭UART设备
关闭UART设备的函数指针是close,传入的参数是uart_ctrl_t结构体变量:
fsp_err_t (* close)(uart_ctrl_t * const p_ctrl);
这个函数指针在使用FSP生成到工程中会指向R_SCI_UART_Close,代码如下:
fsp_err_t R_SCI_UART_Close (uart_ctrl_t * const p_api_ctrl)
{sci_uart_instance_ctrl_t * p_ctrl = (sci_uart_instance_ctrl_t *) p_api_ctrl;……/* 修改状态位0,表示已经关闭 */p_ctrl->open = 0U;/* 禁止UART通道: 关闭中断、关闭时钟等 */p_ctrl->p_reg->SCR = 0U;……/* 禁止中断 */R_BSP_IrqDisable(p_ctrl->p_cfg->rxi_irq);R_BSP_IrqDisable(p_ctrl->p_cfg->eri_irq);/* 关闭这个UART通道的电源 */R_BSP_MODULE_STOP(FSP_IP_SCI, p_ctrl->p_cfg->channel);……;return FSP_SUCCESS;
}
- 发送数据
使用write函数来“启动”发送,函数返回时并不表示数据已经全部发送完毕。原型如下:
fsp_err_t (* write)(uart_ctrl_t * const p_ctrl, uint8_t const * const p_src, uint32_t const bytes);
- 读取数据
使用read函数来“启动”接收,函数返回时并不表示数据已经全部接收完毕。原型如下:
fsp_err_t (* read)(uart_ctrl_t * const p_ctrl,uint8_t * const p_dest, uint32_t const bytes);
如果在调用read函数来“启动接收”之前,UART已经接收到了数据,中断函数也会调用回调函数(event为UART_EVENT_RX_CHAR)。
7.2 UART读写实验
本实验的源码是“0701_UART”,使用串口工具给开发板发送字符,开发板接收到后把字符加1,再发给PC。
7.2.1 配置UART
参考《7.1.1使用RASC配置》进行配置,参考《7.1.4中断回调函数》添加代码。
7.2.2 应用程序
在hal_entry.c文件中的hal_entry()函数里添加如下代码:
/* TODO: add your own code here */
fsp_err_t err;
uint8_t c;/* 配置串口 */
err = g_uart7.p_api->open(g_uart7.p_ctrl, g_uart7.p_cfg);
/* 启动发送字符 */
g_uart7.p_api->write(g_uart7.p_ctrl, "100ask\r\n", 8);
/* 等待发送完毕 */
uart7_wait_for_tx();
while (1)
{/* 启动接收字符 */err = g_uart7.p_api->read(g_uart7.p_ctrl, &c, 1);if (!err){/* 等待接收完毕 */uart7_wait_for_rx();c++; /* 加1 *//* 启动发送字符 */g_uart7.p_api->write(g_uart7.p_ctrl, &c, 1);/* 等待发送完毕 */uart7_wait_for_tx();}
}
7.2.3 上机实验
先使用串口工具打开开发板自带的USB串口,波特率设置为115200,数据位为8,停止位为1,无校验位,不使用流控。
程序运行后,在串口工具里可以看到打印出“100ask”,然后输入“1234abc”会显示出“2345bcd”,示例如下:
100ask
2345bcd
7.3 stdio实验
本实验的源码是“0702_stdio”,它的功能是:使用printf、scanf。
7.3.1 实现思路
printf、scanf本身的代码来自于C库,或者MicroLIB库。要在串口上使用printf、scanf,实现串口相关的fputc、fgetc函数即可。
在使用scanf时,使用“回显功能”体验更好。“回显”就是:在PC机上使用串口工具发送一个字符给开发板,开发板接收到后把同样的字符发回给PC机,这样串口工具就会显示出这个字符。如果不使用回显功能,我们在串口工具上输入时没有任何显示,相当于“盲打”。
如何实现“回显”?在fgetc函数里,接收到PC发来的字符后,再使用fputc把它发送给PC即可。如果发现接收到回车字符(‘\r’),则还需要发送换行字符(’\n’),否则我们在串口工具上按下回车键时,光标只会回到行首而不会调到下一行。
7.3.2 编写程序
“0702_stdio”是在“0701_UART”的基础上修改的。在src\hal_entry.c中实现了fputc、fgetc函数,代码如下:
/* 重写这个函数,重定向printf */
int fputc(int ch, FILE * f)
{(void)f;/* 启动发送字符 */g_uart7.p_api->write(g_uart7.p_ctrl, (uint8_t const * const)&ch, 1);/* 等待发送完毕 */uart7_wait_for_tx();return ch;
}/* 重写这个函数,重定向scanf */
int fgetc(FILE *f)
{uint8_t ch;(void)f;/* 启动接收字符 */g_uart7.p_api->read(g_uart7.p_ctrl, &ch, 1);/* 等待接收完毕 */uart7_wait_for_rx();/* 回显 */{fputc(ch, NULL);/* 回车之后加换行 */if (ch == '\r'){fputc('\n', NULL);;}}return (int)ch;
}
示例代码如下,从串口上读入两个整数,求和后输出:
void hal_entry(void)
{/* TODO: add your own code here */fsp_err_t err;uint32_t a, b;/* 配置串口 */err = g_uart7.p_api->open(g_uart7.p_ctrl, g_uart7.p_cfg);printf("www.100ask.net\r\n");while (1){printf("Please enter two number:\r\n");scanf("%d%d", &a, &b);printf("%d+%d=%d\r\n", a, b, a+b);}
}
7.3.3 上机实验
在Keil工程里,确保选择了MicroLIB,如下图确认:

程序烧写、运行后,在串口工具上看到“Please enter two number:”时,输入一个数值并回车,再输入第2个数值并回车,即可看到效果。如下图:
www.100ask.net
Please enter two number:
12
34
12+34=46
Please enter two number:
7.4 接收大量数据
本实验的源码是“0703_circle_buffer”,它的能接收大量的串口数据。板子使用串口连接其他模块(比如WIFI模块)时,这些模块有可能突然发来大量的数据。怎样确保数据不丢失?
7.4.1 问题与解决思路
使用sci_uart模块接收串口数据时,有两种方法:
- 程序调用read函数“启动接收”,中断回调函数里确定参数event等于UART_EVENT_RX_COMPLETE,表示接收到指定数目的数据了
- 程序没有调用read函数,中断回调函数确定参数event等于UART_EVENT_RX_CHAR,然后保存数据
假设函数A读取串口数据、处理,示例代码如下:
void A(void)
{while (1){/* 启动接收字符 */err = g_uart7.p_api->read(g_uart7.p_ctrl, &c, 1);/* 等待接收完毕 */uart7_wait_for_rx();/* 处理 */process_data();}
}
考虑这个场景:
- 第6行代码启动“接收”,在第8行等待接收成功
- 第10行的process_data函数非常耗时
- 在第10行的函数执行期间,外接的模块继续发来大量的数据,这个时候就会出现问题
中断程序得到其他字符时会调用回调函数:event为UART_EVENT_RX_CHAR,而不是UART_EVENT_RX_COMPLETE:因为process_data未执行完,导致第6行的代码还没有被调用。
所以,我们需要在回调函数里处理event为UART_EVENT_RX_CHAR的情况:以存储“来不及处理的字符”。既然如此,干脆把所有接收到的字符存入一个buffer,同时修改fgetc让它直接返回buffer里的数据。
对于这个buffer,中断函数的回调函数从UART得到数据后写入buffer,程序从中读取数据,非常适合使用环形缓冲区。
7.4.2 环形缓冲区
环形缓冲区特别适合这种场景:
- 一方写buffer
- 另一方读buffer。
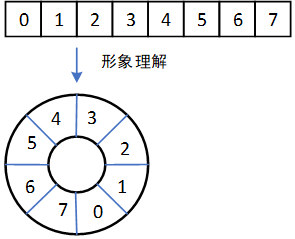
环形缓冲区实际上还是一维数组,假设有N个数组项,从第0个数组项开始遍历,访问完第N-1个数组项后,再从0开始——这就是“环形”的含义,如下图所示:
环形缓冲区的工作原理如下图所示:
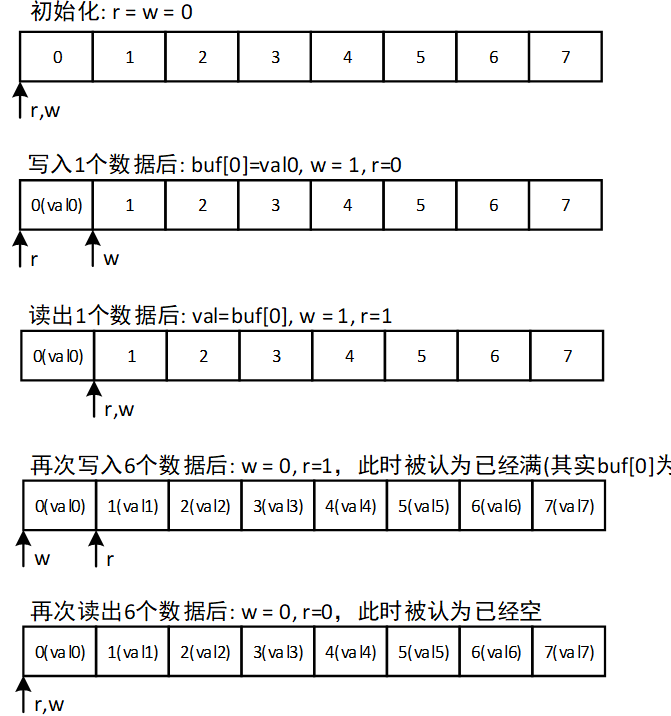
① 有读位置、写位置:r、w,它们表示“下一个要读的位置”、“下一个要写的位置”。初始值都是0。
② 写数据时:把数据写入buffer[w],然后调整w指向下一个位置(当w越界后要从0开始)。
③ 读数据时:从buffer[r]读出数据,然后调整r指向下一个位置(当r越界后要从0开始)。
④ 判断buffer为空:r等于w时表示空
⑤ 判断buffer为满:“下一个写位置”等于当前读位置
7.4.3 环形缓冲区编程
以面向对象的编程思想,针对环形缓冲区先定义一个结构体类型,代码在0703_circle_buffer\src\circle_buf.h文件中,如下:
typedef struct circle_buf {uint32_t r;uint32_t w;uint32_t max_len;uint8_t *buffer; int32_t (*put)(struct circle_buf *pcb, uint8_t v);int32_t (*get)(struct circle_buf *pcb, uint8_t *pv);
}circle_buf_t;
- 第2~5行分别是读位置、写位置、buffer大小、buffer指针。
- 第6、7行是两个函数指针:写buffer、读buffer。
在0703_circle_buffer\src\circle_buf.c中,定义并初始化了一个环形缓冲区结构体,代码如下:
static uint8_t rx_buf[64];
circle_buf_t g_rx_buf;void circlebuf_init(void)
{g_rx_buf.r = g_rx_buf.w = 0;g_rx_buf.buffer = rx_buf;g_rx_buf.max_len = sizeof(rx_buf);g_rx_buf.get = circlebuf_get;g_rx_buf.put = circlebuf_put;
}
- 第01行定义了一个buffer,在第50行里它被赋给环形缓冲区结构体。
- 第02行定义了一个全局的环形缓冲区结构体变量g_rx_buf,以后会直接使用这个变量。
- 第04行的circlebuf_init函数被用来初始化g_rx_buf。
- 第09、10行给g_rx_buf设置了两个函数,这是环形缓冲区的核心操作函数。
-
写环形缓冲区的代码
static int32_t circlebuf_put(struct circle_buf *pcb, uint8_t v) {uint32_t next_w;/* 计算"下一个写位置的下一个", 如果越界就要设置为0 */next_w = pcb->w + 1;if (next_w == pcb->max_len)next_w = 0;/* 未满? */if (next_w != pcb->r){/* 写入数据 */pcb->buffer[pcb->w] = v;/* 设置下一个写位置 */pcb->w = next_w;return 0;}return -1; } -
读环形缓冲区的代码
static int32_t circlebuf_get(struct circle_buf *pcb, uint8_t *pv){/* 不空? */if (pcb->w != pcb->r){/* 读出数据 */*pv = pcb->buffer[pcb->r];/* 计算"下一个读位置", 如果越界就要设置为0 */pcb->r++;if (pcb->r == pcb->max_len)pcb->r = 0;return 0;}return -1;}
7.4.4 改造程序
使用环形缓冲区后,应用程序无需调用UART的read函数来“启动读取”,只需要读取环形缓冲区即可。
谁给环形缓冲区提供数据?板子接收到串口数据时,中断函数被调用,中断函数会调用回调函数,回调函数里把数据写入环形缓冲区。
在0703_circle_buffer\src\hal_entry.c里,回调函数代码如下:
static volatile int g_uart7_tx_complete = 0;void uart7_callback(uart_callback_args_t * p_args)
{switch (p_args->event){case UART_EVENT_TX_COMPLETE:{g_uart7_tx_complete = 1;break;}case UART_EVENT_RX_CHAR:{g_rx_buf.put(&g_rx_buf, (uint8_t)p_args->data);break;}default:{break;}}
}
- 第12~16行,把接收到在字符放入环形缓冲区g_rx_buf里。
现在可以修改fgetc函数了,代码在0703_circle_buffer\src\console.c里,如下:
/* 重写这个函数,重定向scanf */
int fgetc(FILE *f)
{uint8_t ch;(void)f;while (g_rx_buf.get(&g_rx_buf, &ch)){};/* 回显 */{fputc(ch, NULL);/* 回车之后加换行 */if (ch == '\r'){fputc('\n', NULL);;}}return (int)ch;
}
- 第07行从环形缓冲区中得到数据:如果失败则再次读取。
- 第09~18行是回显操作。
为了测试“唤醒缓冲区可以不丢数据”,修改应用程序代码在0703_circle_buffer\src\hal_entry.c,如下:
void hal_entry(void)
{/* TODO: add your own code here */fsp_err_t err;int a = 1, b =2 ;/* 初始化环形缓冲区 */circlebuf_init();/* 配置串口 */err = g_uart7.p_api->open(g_uart7.p_ctrl, g_uart7.p_cfg);printf("www.100ask.net\r\n");printf("waiting 10 seconds, you can enter datas too.\r\n");// 延时10秒R_BSP_SoftwareDelay(1, 10*BSP_DELAY_UNITS_SECONDS);while (1){printf("Please enter two number:\r\n");scanf("%d%d", &a, &b);printf("%d + %d = %d\r\n", a, b, a+b);}
}
- 第16行里故意延时10秒,你可以在这个时间里输入字符。
7.4.5 上机实验
当程序打印出“waiting 10 seconds, you can enter datas too.”时,可以输入1并回车、输入2并回车(盲打,这时没有回显),然后等待。最后可以看到打印后续结果:
www.100ask.net
waiting 10 seconds, you can enter datas too.
Please enter two number:
1
2
1 + 2 = 3
Please enter two numbe