目录
一、Arxml文件
二、各类ARXML文件
一、Arxml文件
arxml文件是AUTOSAR(Automotive Open System Architecture)标准定义的XML文件,用于描述汽车电子系统中的软件组件、通信接口和参数配置等信息。
arxml文件的主要作用是在AUTOSAR架构下实现软件组件的配置和集成。它提供了一种统一的规范,使得不同供应商开发的软件组件可以在相同的汽车电子系统中互相配合工作。同时,arxml文件还可用于工具之间的数据交换和自动化相关操作,如代码生成、配置验证等。
arxml文件的内容包括以下几个主要部分:
- 软件组件描述:定义了软件组件的名称、类型、版本等信息,以及该组件所提供的服务和功能。
- 接口描述:定义了软件组件之间的通信接口,包括提供的服务接口和需要的服务接口。
- 参数配置:定义了软件组件的配置参数,包括初始值、范围限制等。
- 通信描述:定义了不同软件组件之间的通信方式,包括消息传输方式、信号类型、数据长度等。
- 系统描述:定义了整个汽车电子系统的架构和组件之间的关系。
简而言之,arxml就是AUTOSAR规定的一种通用配置文件的格式,用于整个AUTOSAR开发过程的数据交互。
二、各类ARXML文件
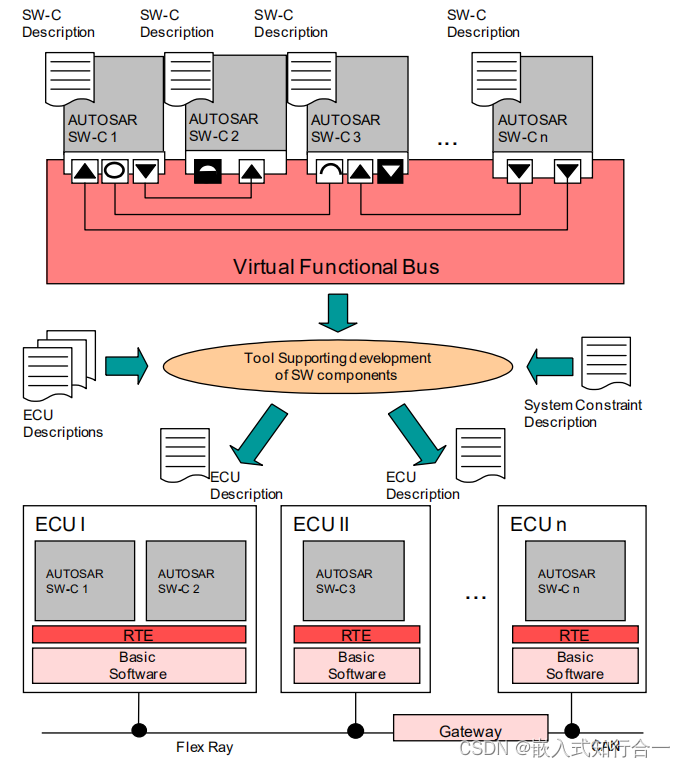
在整个AUTOSAR开发过程,根据描述文件ARXML所描述的内容和用途不同,将其分为关注软件构件本身的属性和接口的SWC描述文件、关注整个系统级的约束条件的系统约束描述文件、关注ECU的资源和能力的ECU资源描述文件、集合整个系统的配置信息的系统配置描述文件、以及从系统配置描述文件中提取的具体ECU配置信息的ECU萃取文件。
| 文件类型 | 文件说明 | 主要内容 |
| SWC描述文件 | SWC描述文件用于定义软件组件的功能、接口、属性等信息。SWC描述文件可能有多个文件。 |
|
| 系统约束描述文件 | 系统约束描述文件是用于描述系统级约束条件,如硬件资源限制、通信协议要求等。是对整车的公共信息的描述。网络拓扑 |
|
| ECU资源描述文件 | 描述哪些ECU能实现哪些具体的功能(SWC),具有哪些资源。 |
|
| 系统配置描述文件 | 系统配置描述文件是用于描述整个系统的配置信息,包括软件构件的部署、软硬件之间的连接关系等。 | 包含了整车的上述所有信息,是以下三种文件的汇总:
|
| ECU萃取描述文件 | 就是将系统配置描述文件的信息分配给单个ECU,使得单个ECU得到其需要的信息,不需要的信息就过滤掉了。ECU通过这些信息就能搭建起来自己的软件 |
|
根据AUTSOAR方法论的工作流程来说,上述描述文件一般由OEM配置完成,最后将系统配置描述文件的信息分配给单个ECU,萃取不同的ECU萃取文件交接给TIER1,TIER1拿到文件后便可以根据上面的信息来设计和开发ECU。
需要注意的是ECU萃取文件(本质就是一个arxml文件)可以SWC、通信矩阵、ECU资源全部信息,也可以简单到只包含通信矩阵的内容,这取决于OEM与TIRE1的分工以及ECU的具体需求。
| 名称 | 解释 | OEM/TIRE1分工说明 |
| Communication | 通信矩阵 | OEM提供给TIRE1的最基本输入物,即一定是由OEM实现 |
| ECU Composition | 就是需要哪些SWC | 目前OEM在AUTOSAR软件开发深度参与,开始负责APP SWC的设计工作,这样的好处就是能使得整车设计更加协调一致,更加容易把控。 |
| Data Mapping | Network Signals与SWCs的数据映射 | |
| Compositions | 每个SWC上需要哪些Port、连接器之类的 | |
| Atomics | 功能的具体实现 | 有些OEM甚至参与了部分主要的功能设计与实现,但实际上这部分的工作大部分还是有Tire1自己去实现 |
| Service Mapping | 连接SWCs和Service Components | 基础软件的集成、基础软件服务与SWC之间的数据映射实现工作一直都是由Tire1负责。 |
| Service Components | 为SWCs提供实际使用的BSW服务的接口(需要在BSW中配置过了) |