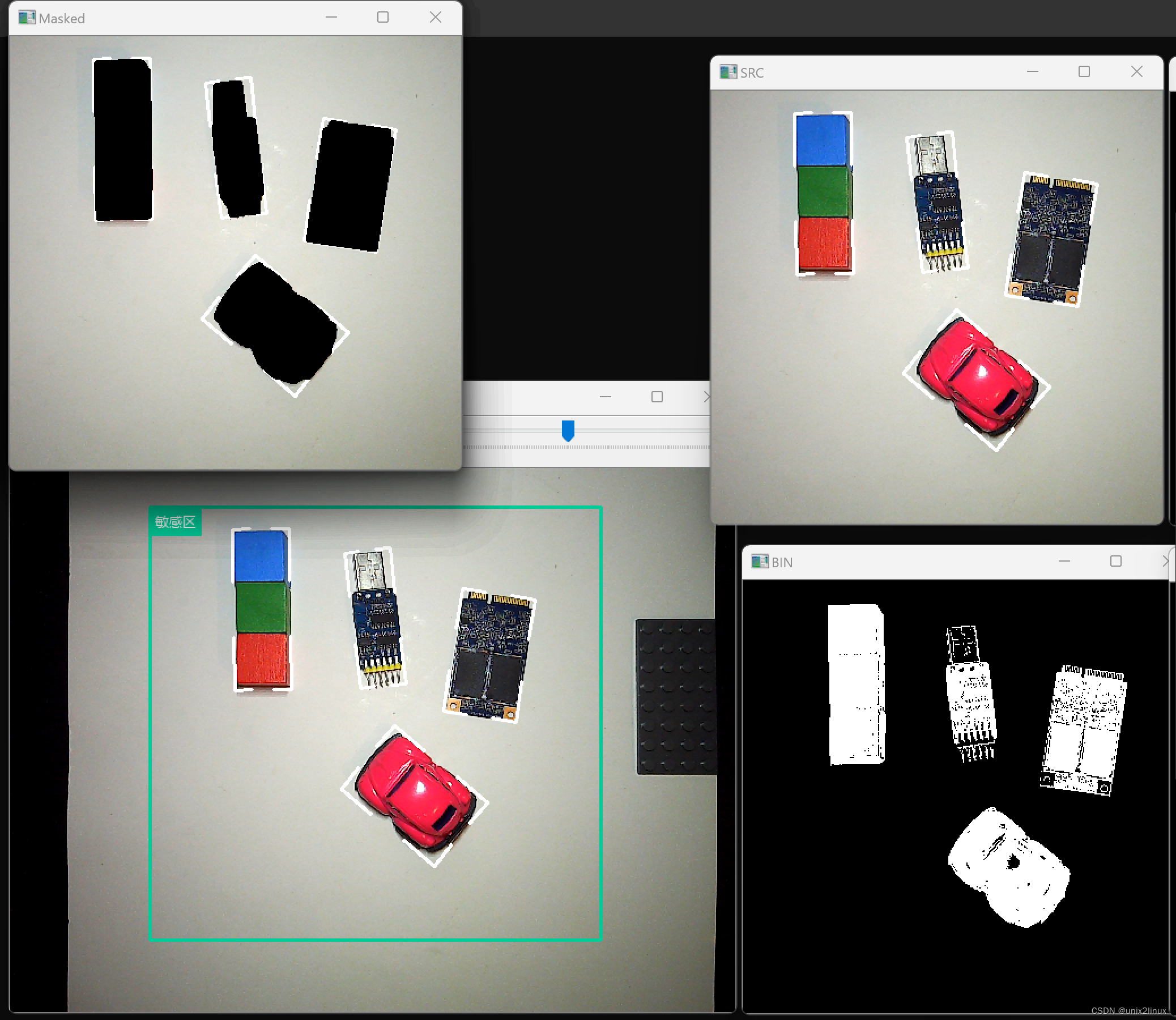
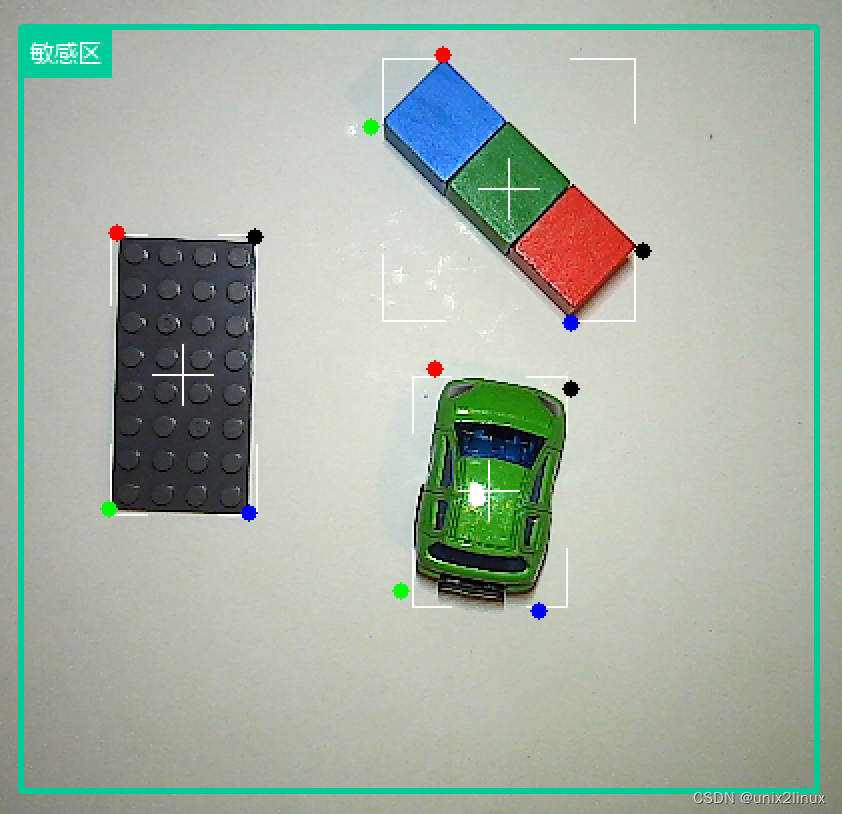
角点
P1 [0] (255, 000, 000)
P2 [1] (000, 255, 000)
P3 [2] (000, 000, 255)
P4 [3] (000, 000, 000)
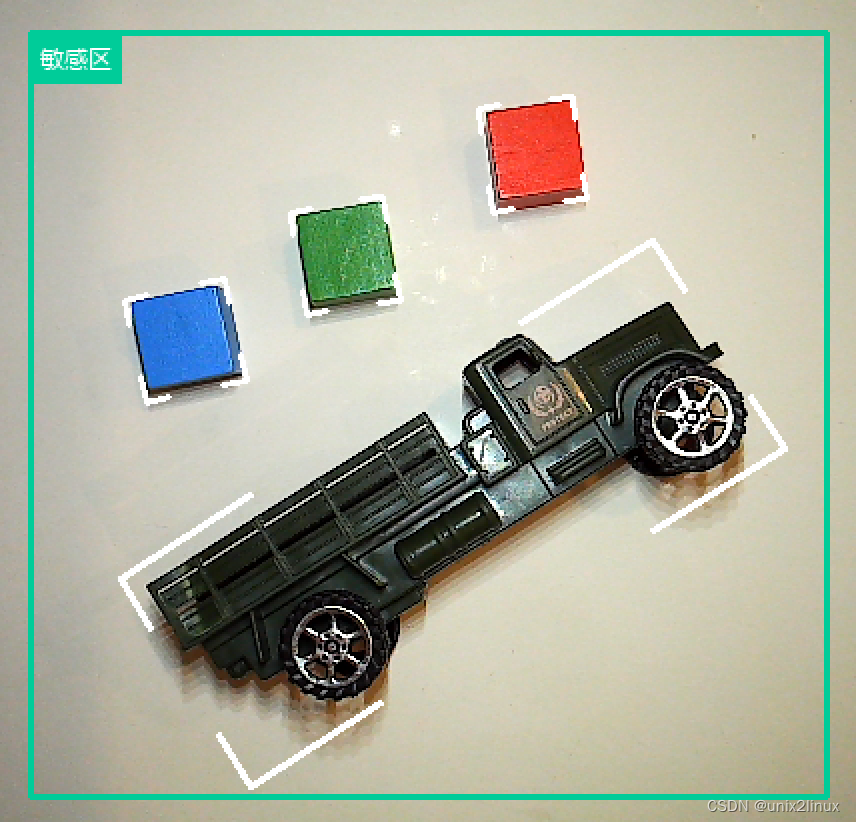
垂直矩形框
rect = cv2.minAreaRect(cnt)targetColor = roi_colortargetThickness = 1targetColor = (255, 255, 255)if lineVerbose:if True:cv2.line(photo, (x, y), (x+w//4, y), targetColor, targetThickness)cv2.line(photo, (x, y), (x, y+h//4), targetColor, targetThickness)cv2.line(photo, (x+3*w//4, y), (x+w, y), targetColor, targetThickness)cv2.line(photo, (x+w, y), (x+w, y+h//4), targetColor, targetThickness)cv2.line(photo, (x, y+h), (x+w//4, y+h), targetColor, targetThickness)cv2.line(photo, (x, y+h), (x, y+3*h//4), targetColor, targetThickness)cv2.line(photo, (x+w, y+h), (x+3*w//4, y+h), targetColor, targetThickness)cv2.line(photo, (x+w, y+h), (x+w, y+3*h//4), targetColor, targetThickness)crossLength = 15cv2.line(photo, (x+w//2-crossLength, y+h//2), (x+w//2+crossLength, y+h//2), targetColor, targetThickness)cv2.line(photo, (x+w//2, y+h//2-crossLength), (x+w//2, y+h//2+crossLength), targetColor, targetThickness)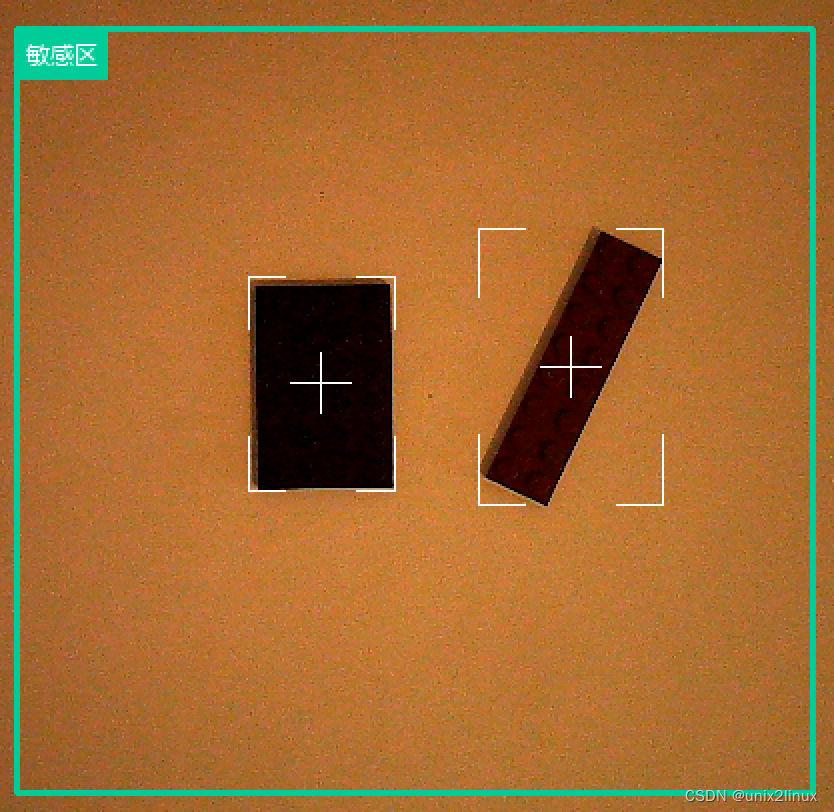
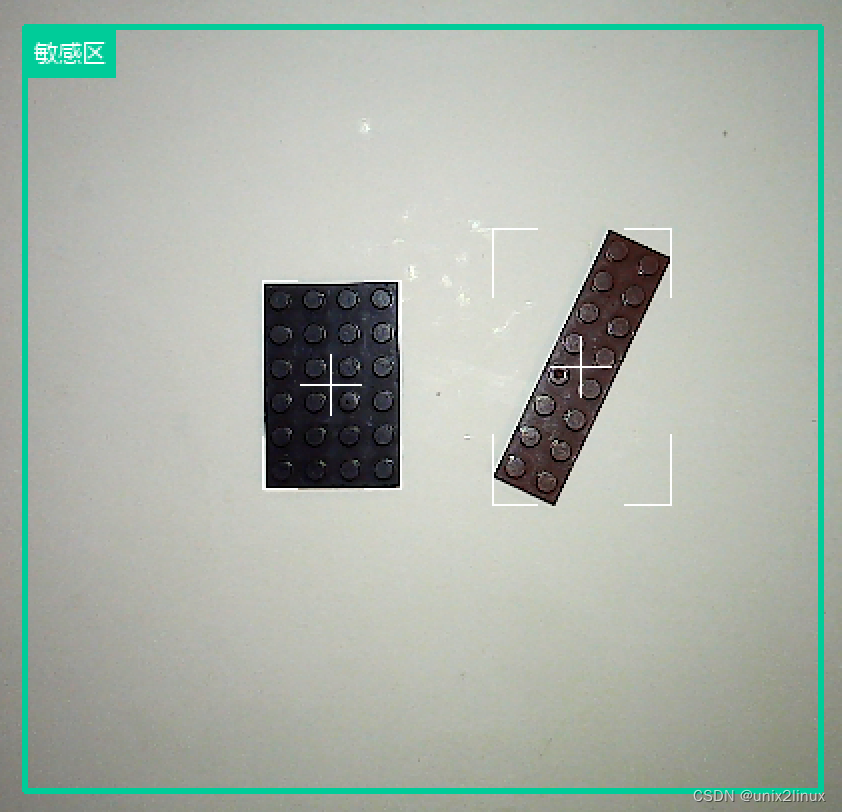
倾斜矩形框
def lineByAngle(photo, p1, p2, length, color, thickness):slope = 0 + (p2[1] - p1[1]) / (p2[0] - p1[0])theta = np.arctan(slope)degree = int(theta * 57.29577) % 360length = getDistance(p1, p2) // 4if (p2[0] < p1[0]):pp = (int(p1[0] - length * np.cos(theta)),int(p1[1] - length * np.sin(theta)))else:pp = (int(p1[0] + length * np.cos(theta)),int(p1[1] + length * np.sin(theta)))cv2.line(photo, p1, pp, color, thickness)