本文总结一些工作中在使用PID控制时积累的经验。
文章目录
- 1 引入
- 2 PID控制的应用
- 2.1 动态PID参数
- 2.2 前馈-反馈控制
- 2.3 积分饱和
- 3 总结
1 引入
之前已经写过两篇关于PID控制的文章,主要从建模的角度描述如何搭建出来PID控制算法。在实际工程项目中,PID的调试可能会比仿真更加麻烦。因此,博主希望专门写一篇用来总结一下自己开发调试的经验,以供日后参考,或者其他同行参考。
由于不同工程师所面对的被控对象的特性不同,博主的一些经验不一定适合所有的应用场景。
2 PID控制的应用
对于基础的三个PID参数的理解,已经有很多资料(包括控制理论教科书上的推导公式),博主不再赘述。这一章主要讲讲在工程中对PID算法进行的一些延申和调试经验,以适应复杂的工程问题。
2.1 动态PID参数
假设在实车车速为30km/h的时候通过调整PID参数使得制动模块达到了性能需求,但是车速在60km/h的时候这套参数又不满足需求,经调试后又获得一套不同的PID参数可以满足60km/h的速度。
针对上面的情况,就可以通过以车速为断点,查表得到不同车速下的PID参数,满足不同车速下的控制性能指标。模型示意如下:
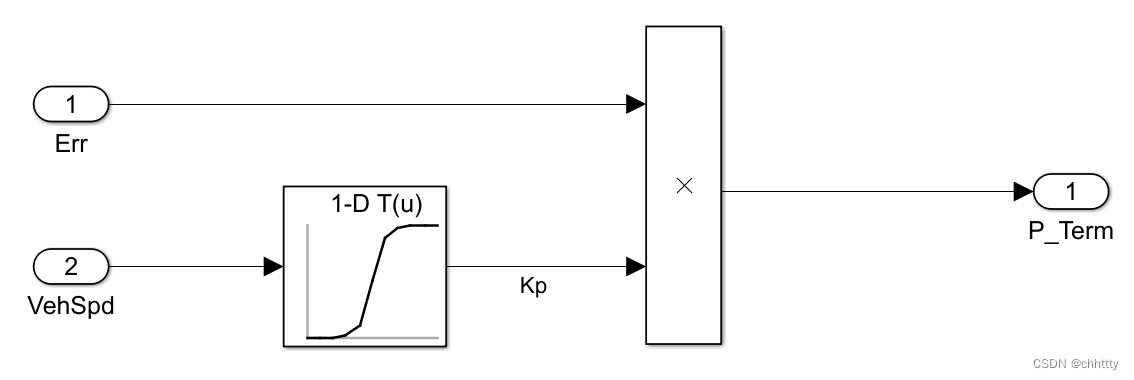
图中的Kp信号不再是一个固定的标定量,而是随着车速变化的Kp值,也就是动态参数,是非常实用的调参手段。
博主还见过一种动态调参方式是通过偏差值查表得出参数,如下图所示。
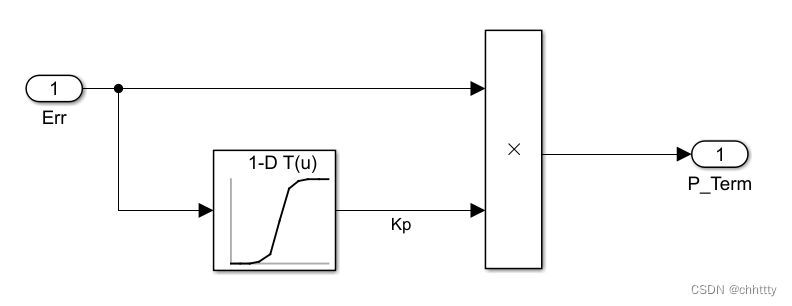
该项目试图通过这种方式,解决偏差值较小的情况下响应迟缓的问题,可以取得较好的效果。
2.2 前馈-反馈控制
PID是反馈控制,也就是需要根据偏差来进行控制,这就造成了一定会有延迟。如果在产生偏差之前就预判到应该大致发出多少的控制量,在这个基础上再通过PID的反馈控制来弥补一些偏差,就能响应得更快。
例如ADAS的车道居中功能,在进入弯道之前没有横向位移的偏差。如果进入弯道之后产生了偏差再去利用PID的反馈控制,就会有延迟,会有偏离车道的风险。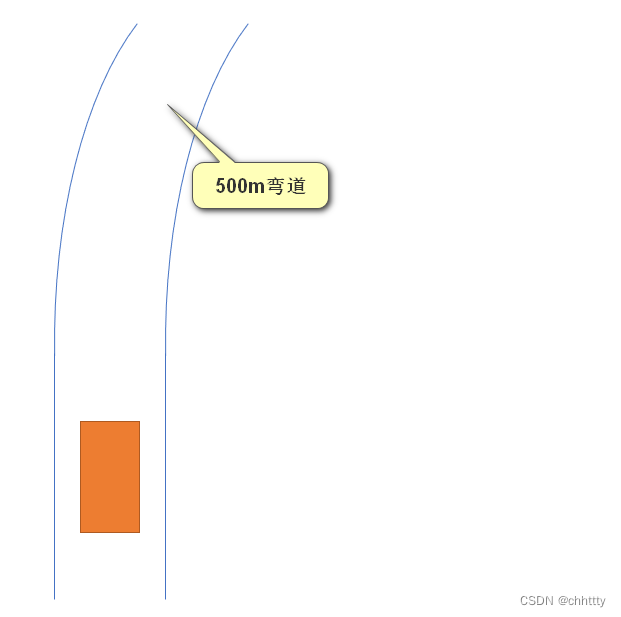
如果结合前馈控制就能很好地解决上述问题。当摄像头检测到前方弯道时,可以根据预定好的弯道-方向盘转角关系表提前请求方向盘打一个角度(就像老司机开车的预判一样),在这个基础上如果有微小的横向位移偏差或者角度方向偏差,再反馈控制弥补。
模型示意如下:
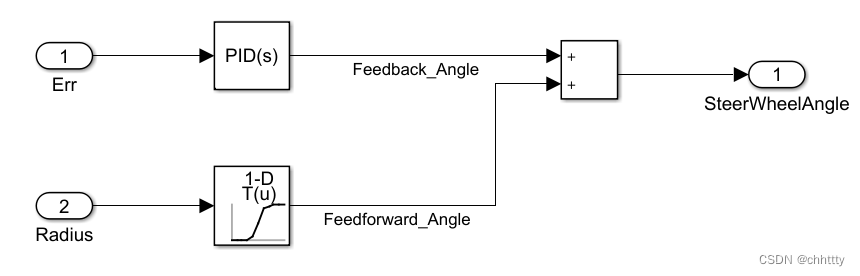
如图中,最终请求的方向盘转角由前馈角度和反馈角度相加得到。
2.3 积分饱和
积分器如果不限制上下限,可能会累积得过大。当超过了系统所能承载的控制量的上下限时,就会到达饱和状态,此时系统产生了超调。超调后由于Err符号相反,会有回正趋势,但是因为积分项积累过大,积分项和比例项想抵消以前的累计更加困难,必须等到控制量进入系统上下限范围的时候才会开始回正,所以这个回正过程会非常迟缓。
基于以上问题,在实际PID控制中需要对积分饱和的情况进行处理。常用方式是积分项限值和复位的处理。

图中包含了对积分项的复位和限幅的处理。
3 总结
本文总结一些工作中在使用PID控制时积累的经验。
>>返回个人博客总目录



![[面试] 15道最典型的k8s面试题](https://img-blog.csdnimg.cn/ce77c438e66b415e9d325b0d66e8fbd1.jpeg#pic_center)