文章目录
- 环境
- 依赖安装
- Opencv
- Pangolin
- Eigen3
- DBoW2 and g2o
- Python
- boost
- libssl-dev
- ORB_SLAM3的编译和安装
- 数据集测试
- 参考
环境
- ubuntu18.04-x86
- nvidia-3080工作站
依赖安装
Opencv
参考这篇博客。
Pangolin
安装v0.6版本的,最新版会报错 error: ‘slots_reference’ was not declared in this scope
git clone -b v0.6 https://gitcode.net/mirrors/stevenlovegrove/pangolin.git
cd Pangolin
mkdir build && cd build
#sudo apt install cmake -y && sudo apt install build-essential -y
cmake ..
cmake --build .
sudo make install
Eigen3
#github 有个mirror,版本3.3.4 from 2017
git clone https://github.com/eigenteam/eigen-git-mirror#安装
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install#安装后,头文件安装在/usr/local/include/eigen3/
DBoW2 and g2o
DBoW2主要用于回环检测,g2o(General Graph Optimization)主要用于图优化。
ORB-SLAM3的源码包自带DBoW2 and g2o,编译时会自动安装。不用管。
Python
sudo apt install libpython2.7-dev
boost
官网
下载之后解压
tar -xzvf boost_1_81_0.tar.gz
解压之后进入解压出来的文件夹
然后执行这个脚本
sudo ./bootstrap.sh
执行完毕之后,你会发现又多了些文件
执行如下脚本
sudo ./b2 install -j24
libssl-dev
sudo apt-get install libssl-dev
ORB_SLAM3的编译和安装
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
cd ORB_SLAM3
chmod +x build.sh
./build.sh
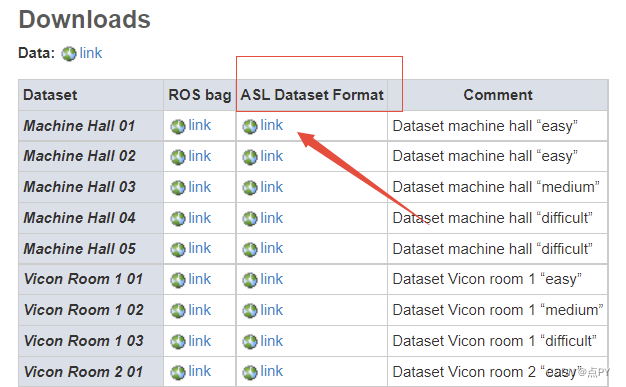
数据集测试
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets#downloads
选择ASL格式,下载第一个MH01
参考
https://blog.csdn.net/holly_Z_P_F/article/details/118031317