1.在Unity场景中新建一个空物体,在空物体上添加MeshRenderer和MeshFilter组件。
2.新建一个C#脚本命名SphereMesh,将脚本挂载到空物体上,如图:

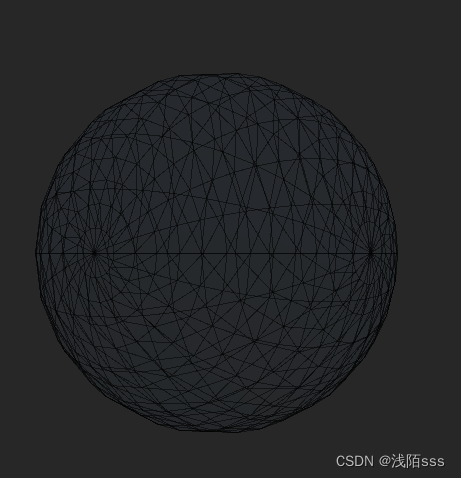
运行场景就可以看到生成一个球体

全部代码如下:
using UnityEngine;public class SphereMesh : MonoBehaviour
{void Start(){CreateSphereMesh();}void CreateSphereMesh(){MeshRenderer meshRenderer = gameObject.GetComponent<MeshRenderer>();meshRenderer.sharedMaterial = new Material(Shader.Find("Standard"));MeshFilter meshFilter = gameObject.GetComponent<MeshFilter>();Mesh mesh = new Mesh();SphereShape shape = Init(20,20);mesh.vertices = shape.vertices;mesh.triangles = shape.index;Vector3[] normal = new Vector3[shape.vertices.Length];for (int i = 0; i < shape.vertices.Length; i++) {normal[i] = -Vector3.forward;}mesh.normals = normal;mesh.uv = shape.uv;meshFilter.mesh = mesh;}SphereShape Init(int latCount, int lonCount){if (latCount < 2 || lonCount < 2)return null;int totalIndexCount = 6 * (latCount - 1) * lonCount;int totalVertexCount = (latCount + 1) * (lonCount + 1);float latStep = Mathf.PI / latCount;float lonStep = 2 * Mathf.PI / lonCount;int[] index = new int[totalIndexCount];Vector3[] vertices = new Vector3[totalVertexCount];Vector2[] uv = new Vector2[totalVertexCount];int currentVertex = 0;int currentIndex = 0;for (int lat = 0; lat <= latCount; lat++){for (int lon = 0; lon <= lonCount; lon++){vertices[currentVertex] = new Vector3(Mathf.Cos(lon * lonStep)*Mathf.Sin(lat * latStep),Mathf.Sin(lon * lonStep) * Mathf.Sin(lat * latStep),Mathf.Cos(lat * latStep - Mathf.PI));uv[currentVertex] = new Vector2((float)lon / lonCount,(float)lat / latCount);currentVertex++;}}int v = lonCount + 1;for (int lon = 0;lon < latCount; lon++) {index[currentIndex++] = lon;index[currentIndex++] = v;index[currentIndex++] = v + 1;v++;}v = lonCount + 1;for (int lat = 1; lat < latCount - 1; lat++){for (int lon = 0; lon < lonCount; lon++){index[currentIndex++] = v;index[currentIndex++] = v + lonCount + 1;index[currentIndex++] = v + 1;index[currentIndex++] = v + 1;index[currentIndex++] = v + lonCount + 1;index[currentIndex++] = v + lonCount + 2;v += 1;}v += 1;}for (int lon = 0; lon < lonCount; lon++){index[currentIndex++] = v;index[currentIndex++] = v + lonCount + 1;index[currentIndex++] = v + 1;v += 1;}SphereShape shape = new SphereShape();shape.index = index;shape.vertices = vertices;shape.uv = uv;return shape;}
}class SphereShape : Shape
{ }class Shape
{public int[] index;public Vector3[] vertices;public Vector2[] uv;
}
参考链接:
UV Sphere (winter.dev)![]() https://winter.dev/projects/mesh/uvsphere
https://winter.dev/projects/mesh/uvsphere