在SOLIDWORKS搭建一个简易的履带式机器人


















本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/130800.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
Spring5应用之事务处理
作者简介:☕️大家好,我是Aomsir,一个爱折腾的开发者! 个人主页:Aomsir_Spring5应用专栏,Netty应用专栏,RPC应用专栏-CSDN博客 当前专栏:Spring5应用专栏_Aomsir的博客-CSDN博客 文章目录 参考文献前言事务…
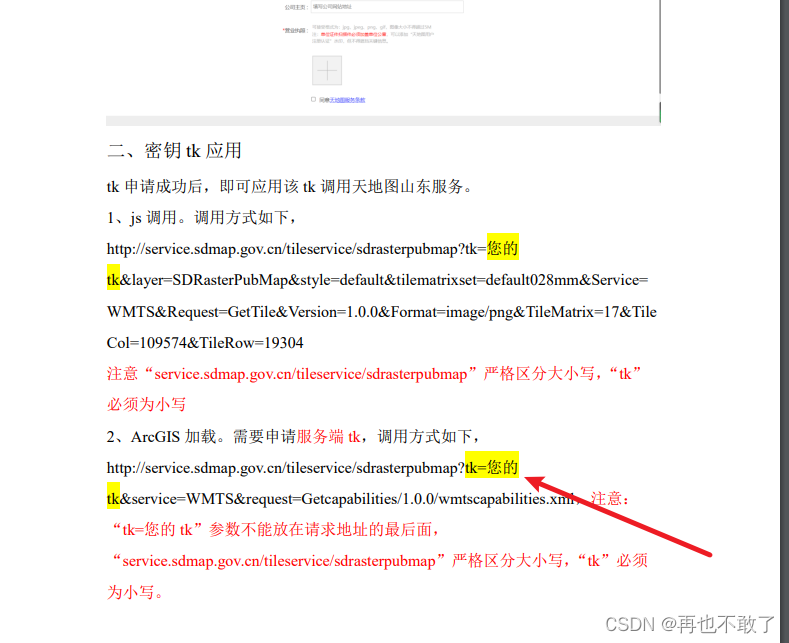
arcgis添加天地图山东wtms服务
arcgis添加天地图wtms服务 首先打开天地图山东网站,进入首页然后点击开发资源进入开发页面点击成为开发者,进入申请秘钥页面,申请秘钥;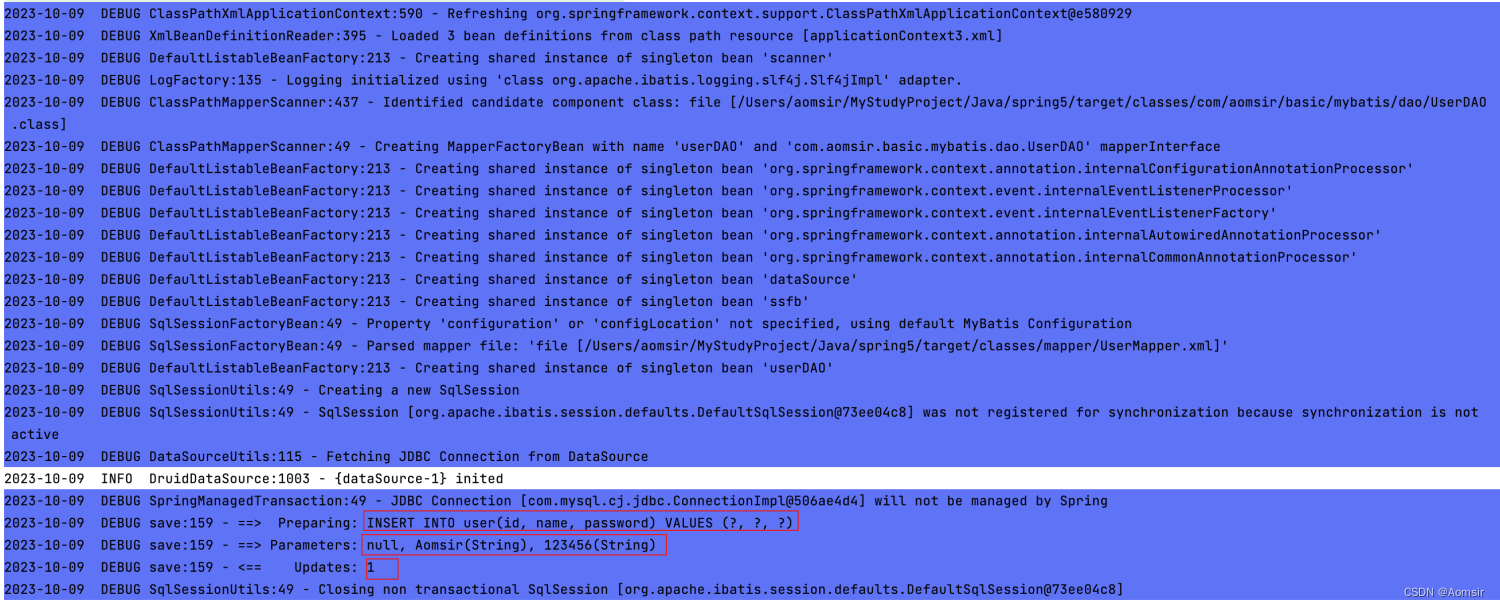
Spring5应用之整合MyBatis
作者简介:☕️大家好,我是Aomsir,一个爱折腾的开发者! 个人主页:Aomsir_Spring5应用专栏,Netty应用专栏,RPC应用专栏-CSDN博客 当前专栏:Spring5应用专栏_Aomsir的博客-CSDN博客 文章目录 参考文献前言为什…
Python图形界面框架PyQt5使用详解
概要 使用Python开发图形界面的软件其实并不多,相对于GUI界面,可能Web方式的应用更受人欢迎。但对于像我一样对其他编程语言比如C#或WPF并不熟悉的人来说,未必不是一个好的工具。
常见GUI框架 PyQt5:Qt是一个跨平台的 C图形用户界…
sanic框架解决多进程共享缓存问题
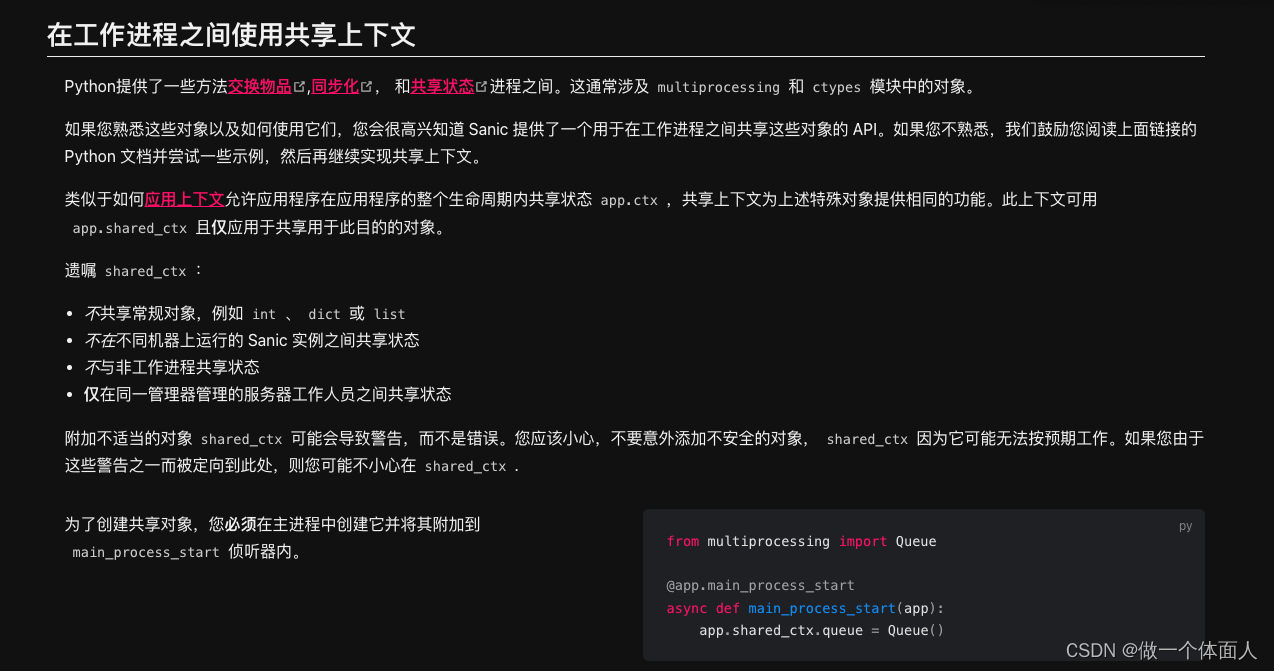
最近在用sanic框架做项目,今天需要处理多进程共享缓存问题,在网上搜索了很多,知道使用multiprocessing模块,但是导入后,直接使用会报错,然后看官网解决问题。
直接看官方文档点我哦
大致意思如下…

02 认识Verilog HDL
02 认识Verilog HDL
对于Verilog的语言的学习,我认为没必要一开始就从头到尾认真的学习这个语言,把这个语言所有细节都搞清楚也不现实,我们能够看懂当前FPGA的代码的程度就可以了,随着学习FPGA深度的增加,再不断的…
二维材料黑科技——MXene
石墨烯,一种由单层碳原子组成的二维材料被广泛应用且为人熟知,具有优异的电学、力学和光学性能。还有一类二维材料,它们由过渡金属和碳或氮原子组成,叫做MXene。 MXene是材料科学中的一类二维无机化合物。这些材料由几个原子层厚度…

小程序如何设置各种时间参数
在小程序管理员后台->基本设置处,可以设置各种时间。例如待支付提醒时间、待支付取消时间、自动发货时间、自动收货时间、自动评价时间等等。下面具体解释一下各个时间的意思。 1. 待支付提醒时间:在用户下单后,如果一段时间内没有完成支付…

基于SpringBoot的抗疫物资管理系统
目录
前言 一、技术栈
二、系统功能介绍
用户管理
公告信息管理
轮播图管理
物质分类管理
物质信息管理
物质入库管理
物质出库管理
个人信息
前台首页功能实现
三、核心代码
1、登录模块 2、文件上传模块
3、代码封装 前言 随着现在网络的快速发展,网…

PMC-2/11/05/000/00/00/01/00/0K MAX-4/11/03/128/08/1/1/00
PMC-2/11/05/000/00/00/01/00/0K MAX-4/11/03/128/08/1/1/00
随着越来越多的人远程工作,团队越来越需要从任何地方管理他们的3D打印机和打印作业。MakerBot CloudPrint(以前的MakerBot Cloud)是下一代基于云的3D打印平台,使个人和团队能够通过浏览器和多…

华为云云耀云服务器L实例评测|测试CentOS的网络配置和访问控制
目录 引言
1 理解几个基础概念
2 配置VPC、子网以及路由表
3 配置安全组策略和访问控制规则
3.1 安全组策略和访问控制简介
3.2 配置安全组策略
3.3 安全组的最佳实践
结论 引言
在云计算时代,网络配置和访问控制是确保您的CentOS虚拟机在云环境中安全运行的…

B端企业如何通过软文提升品牌影响力?
生活中我们采购某种商品时总会考虑这类商品行业类的知名品牌,这就是品牌影响力的重要性,B端企业也需要品牌影响力,由于B端企业的特殊性,它更需要通过口碑和声誉的提升增强用户信任。软文就能帮助企业提升品牌影响力,下…