注1:本文系“简要介绍”系列之一,仅从概念上对两阶段点云目标检测进行非常简要的介绍,不适合用于深入和详细的了解。
两阶段点云目标检测:理论与实践
在这篇博客中,我们将探索两阶段点云目标检测的理论基础和实际应用。我们将深入了解两阶段目标检测的背景,详述其原理和公式推导,研究其现状,挑战以及未来展望。此外,我们还会包含一个Python代码示例,以帮助读者更好地理解两阶段点云目标检测。
1 背景介绍
目标检测是计算机视觉中的一个重要任务,其目的是识别和定位图像中的物体。对于二维图像,这已经有许多有效的方法。然而,对于三维数据(如由LiDAR生成的点云数据),目标检测则更为复杂。点云目标检测是一项任务,需要在三维空间中检测出目标对象的存在和位置,而两阶段点云目标检测则是一种先进的处理方式。
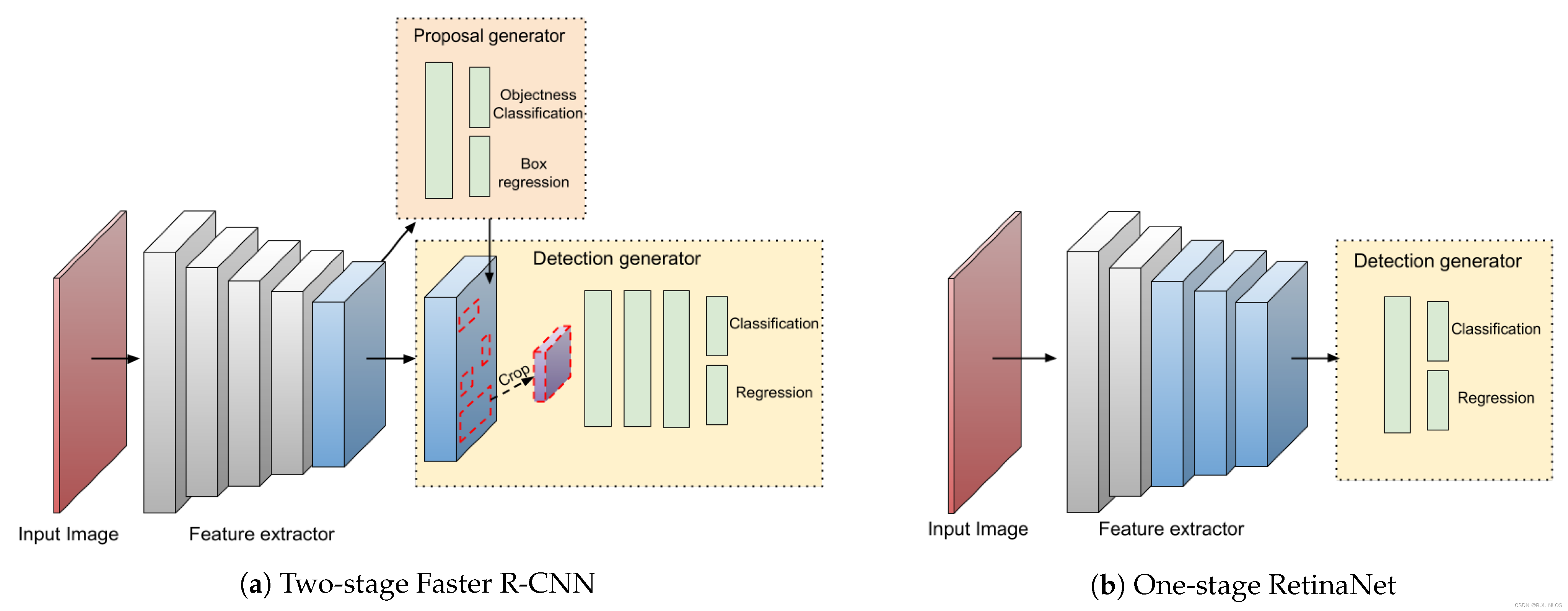
Remote Sensing | Free Full-Text | On the Performance of One-Stage and Two-Stage Object Detectors in Autonomous Vehicles Using Camera Data
2 原理介绍和推导
2.1 两阶段目标检测
两阶段点云目标检测方法通常包括**区域提议网络(Region Proposal Network, RPN)和区域检测网络(Region Detection Network)**两个主要步骤。首先,RPN会在输入的点云中生成可能包含目标的区域提议。然后,区域检测网络会利用这些提议进行精细化的目标检测。
A. 区域提议网络(RPN)
RPN的目标是为目标检测生成一组初步的区域提议。RPN通常包括一个卷积神经网络,用于学习从输入的点云中提取有用的特征,并根据这些特征预测可能的目标位置。
B. 区域检测网络
区域检测网络接收来自RPN的区域提议,然后进行更精细的目标检测。具体来说,它会对每个区域提议进行分类(判断每个提议是否包含目标,以及目标的类型),并回归(微调提议的位置和大小,使其更准确地匹配目标)。
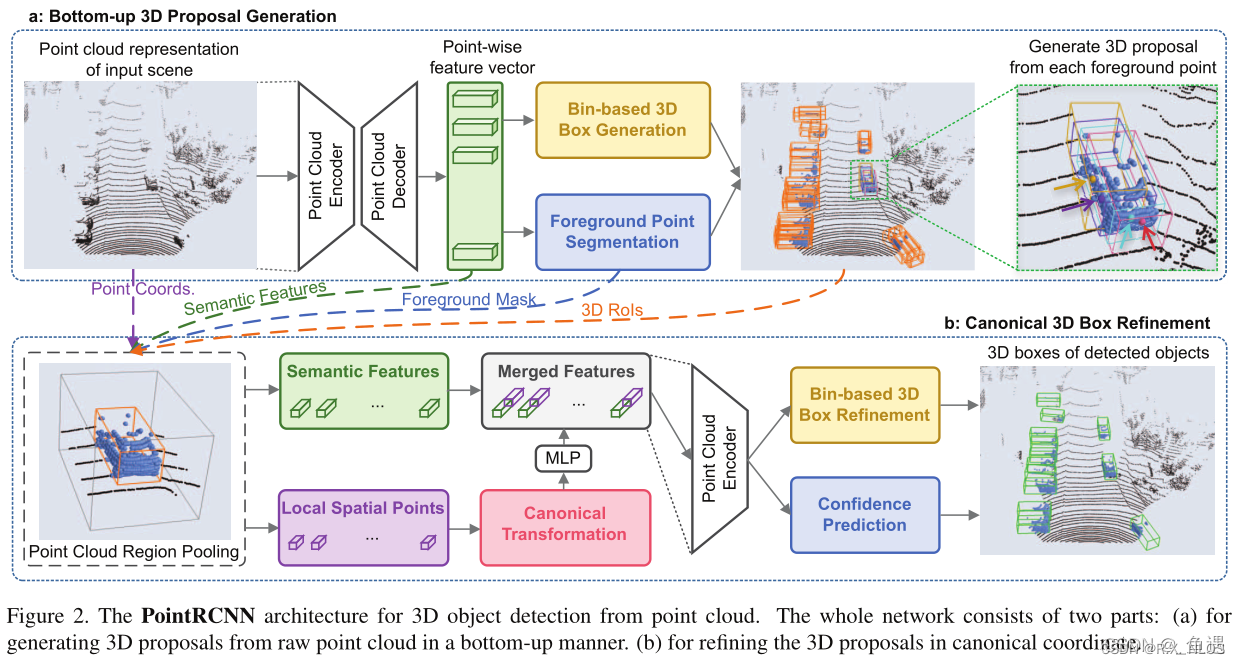
PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud _梨鱼的博客-CSDN博客
3 研究现状
两阶段点云目标检测在许多实际应用中都取得了良好的结果,如自动驾驶、无人机导航、机器人视觉等。其中,一些主要的研究成果包括:PointRCNN、PV-RCNN等等。
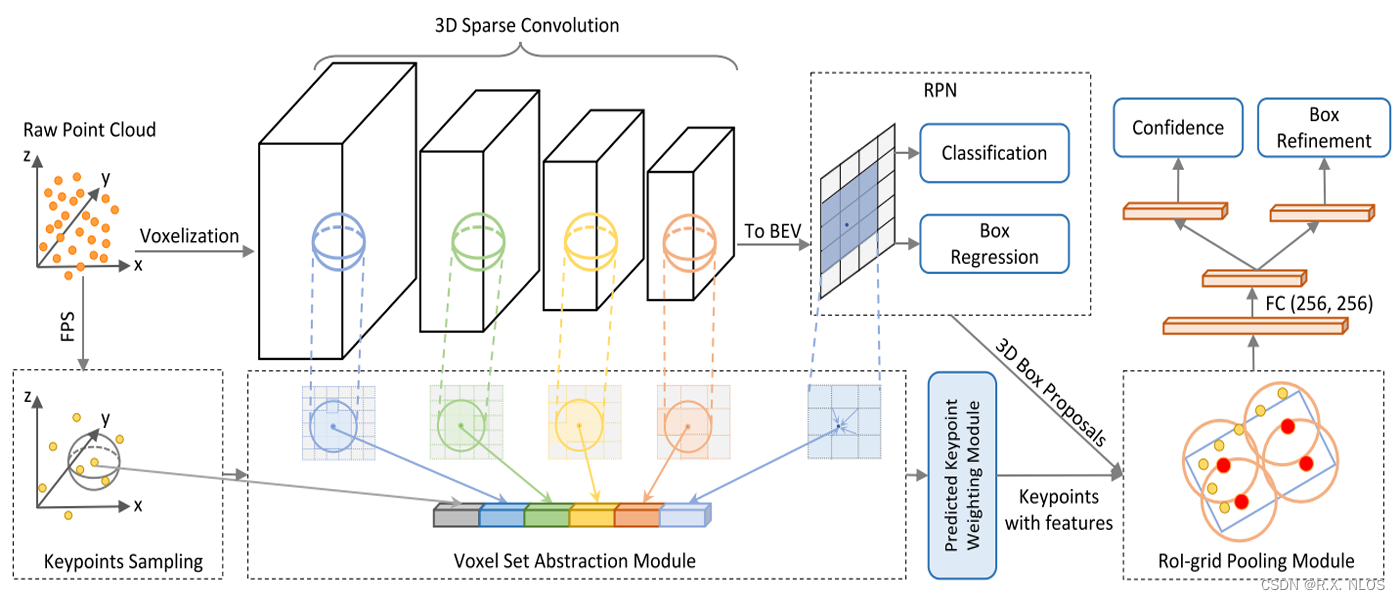
PV-RCNN - Gojay’s Records
4 挑战
尽管两阶段点云目标检测在实际应用中已经取得了显著的成果,但仍存在以下挑战:
- 数据稀疏性:点云数据往往十分稀疏,这会影响目标检测的准确性。
- 计算复杂性:由于需要在三维空间中进行目标检测,这导致计算复杂性增大。
- 真实环境的复杂性:在真实环境中,目标的形状、大小、姿态和背景等都会有大量的变化,这增加了目标检测的难度。
5 未来展望
虽然两阶段点云目标检测面临着一些挑战,但由于其在实际应用中的重要性,未来仍有大量的研究工作需要进行。特别是,研究者们需要开发出更有效的方法来处理点云数据的稀疏性,以及提高目标检测的准确性和计算效率。此外,还需要进行更多的实际应用研究,以推动两阶段点云目标检测的进一步发展。
6 代码示例
# 引入相关库
import torch
import torchvision
from torchvision.models.detection import FasterRCNN
from torchvision.models.detection.rpn import AnchorGenerator# 加载预训练的模型
backbone = torchvision.models.mobilenet_v2(pretrained=True).features
backbone.out_channels = 1280# RPN生成的锚点大小
anchor_generator =AnchorGenerator(sizes=((32, 64, 128, 256, 512),),aspect_ratios=((0.5, 1.0, 2.0),))# 定义RPN
roi_pooler = torchvision.ops.MultiScaleRoIAlign(featmap_names=[0],output_size=7,sampling_ratio=2)# 组装模型
model = FasterRCNN(backbone,num_classes=2,rpn_anchor_generator=anchor_generator,box_roi_pool=roi_pooler)
这个代码示例展示了如何在PyTorch中实现一个基础的两阶段目标检测模型。在这个示例中,我们使用了预训练的MobileNet v2作为RPN的基础网络,然后定义了RPN的锚点大小和区域检测网络的RoI pooling操作。最后,我们将所有这些部分组装到Faster R-CNN模型中,这就是一个两阶段目标检测模型的基本实现。
7 结论
两阶段点云目标检测是一个复杂且有挑战性的问题,但它在很多实际应用中都有重要的价值。通过理解其理论基础,并了解当前的研究现状和面临的挑战,我们可以更好地理解这个问题,并找到更有效的解决方案。