Linux版本号4.1.15 芯片I.MX6ULL 大叔学Linux 品人间百味 思文短情长
RTC就是实时时钟。
本笔记主要学习Linux RTC驱动试验,主要内容包括Linux内核RTC驱动简介、I.MX6U内部RTC分析、RTC时间查看与设置。因为Linux内核已经由NXP写了驱动,所以本节的重点内容只是对其进行的分析。思维导图如下:
一、Linux内核RTC驱动简介
Linux 内核将 RTC 设备抽象为 rtc_device 结构体,因此 RTC 设备驱动就是申请并初始化
rtc_device,最后将 rtc_device 注册到 Linux 内核里面,这样 Linux 内核就有一个 RTC 设备的。
RTC设备的操作是用一个操作集合(结构体)来表示的。
ops成员变量是一个rtc_class_ops类型的指针变量。rtc_class_ops为RTC设备最底层操作函数集合,包括从RTC设备中读取时间、向RTC设备写入新的时间值等。
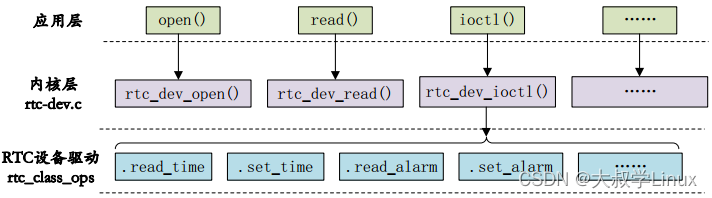
rtc_dev.c文件提供了所有RTC设备共用的file_operation函数操作集。
应用程序可以通过ioctl函数来设置/读取时间、设置/读取闹钟的操作。
rtc_dev_ioctl最终会通过操作rtc_class_ops中的read_time、set_time等函数来对具体RTC设备的读写操作。
rec_read_time会调用_rtc_read_time函数。
_rtc_read_time会调用rtc_class_ops中的read_time来从RTC设备中获取当前时间。
Linux内核中RTC驱动调用流程:
rtc_device_register会申请一个rtc_device并初始化这个rec_device,最后向调用者返回这个rtc_device。
struct rtc_device *rtc_device_register(const char *name,//设备名
struct device *dev,//设备
const struct rtc_class_ops *ops,//RTC底层驱动函数集
struct module *owner)//RTC拥有者//注册成功的话返回rtc_device,失败的话会返回一个负值。rtc_device_unregister注销注册的rtc_device.
void rtc_device_unregister(struct rtc_device *rtc)// rtc是要注销的rtc_device二、I.MX6U内部RTC驱动分析
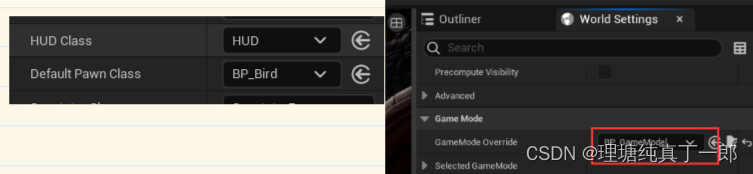
RTC驱动NXP已经给写好了。
分析驱动从设备树入手,找到设备节点snvs_rtc:
1 snvs_rtc: snvs-rtc-lp {
2 compatible = "fsl,sec-v4.0-mon-rtc-lp";
3 regmap = <&snvs>;
4 offset = <0x34>;
5 interrupts = <GIC_SPI 19 IRQ_TYPE_LEVEL_HIGH>, <GIC_SPI 20
IRQ_TYPE_LEVEL_HIGH>;
6 };对应驱动文件为drivers/rtc/rtc-snvs.c:
380 static const struct of_device_id snvs_dt_ids[] = {
381 { .compatible = "fsl,sec-v4.0-mon-rtc-lp", },// imx6ull.dtsi 中的 snvs_rtc 设备节点会和此 驱动匹配。
382 { /* sentinel */ }
383 };
384 MODULE_DEVICE_TABLE(of, snvs_dt_ids);
385
386 static struct platform_driver snvs_rtc_driver = {//标准的 platform 驱动框架,当设备和驱动匹配成功以后 snvs_rtc_probe 函
数就会执行。
387 .driver = {
388 .name = "snvs_rtc",
389 .pm = SNVS_RTC_PM_OPS,
390 .of_match_table = snvs_dt_ids,
391 },
392 .probe = snvs_rtc_probe,
393 };
394 module_platform_driver(snvs_rtc_driver);res = platform_get_resource(pdev, IORESOURCE_MEM, 0);调用 platform_get_resource 函数从设备树中获取到 RTC 外设寄存器基地址。
mmio = devm_ioremap_resource(&pdev->dev, res); 调用函数 devm_ioremap_resource 完成内存映射,得到 RTC 外设寄存器物理基
地址对应的虚拟地址。
data->regmap = devm_regmap_init_mmio(&pdev->dev, mmio,
&snvs_rtc_config); Linux3.1 引入了一个全新的 regmap 机制, regmap 用于提供一套方便的 API 函
数去操作底层硬件寄存器,以提高代码的可重用性。 snvs-rtc.c 文件会采用 regmap 机制来读写
RTC 底层硬件寄存器。这里使用 devm_regmap_init_mmio 函数将 RTC 的硬件寄存器转化为
regmap 形式,这样 regmap 机制的 regmap_write、 regmap_read 等 API 函数才能操作寄存器。
data->irq = platform_get_irq(pdev, 0);从设备树中获取 RTC 的中断号。
/* Initialize glitch detect */
regmap_write(data->regmap, data->offset + SNVS_LPPGDR,
SNVS_LPPGDR_INIT); 设置 RTC_ LPPGDR 寄存器值为 SNVS_LPPGDR_INIT= 0x41736166,这里就是
用的 regmap 机制的 regmap_write 函数完成对寄存器进行写操作。
/* Clear interrupt status */
regmap_write(data->regmap, data->offset + SNVS_LPSR,
0xffffffff);设置 RTC_LPSR 寄存器,写入 0xffffffff, LPSR 是 RTC 状态寄存器,写 1 清零,因此这一步就是清除 LPSR 寄存器。
/* Enable RTC */
snvs_rtc_enable(data, true);调用 snvs_rtc_enable 函数使能 RTC,此函数会设置 RTC_LPCR 寄存器。
ret = devm_request_irq(&pdev->dev, data->irq,
snvs_rtc_irq_handler,
IRQF_SHARED, "rtc alarm", &pdev->dev);调用 devm_request_irq函数请求 RTC中断,中断服务函数为 snvs_rtc_irq_handler,用于 RTC 闹钟中断。
data->rtc = devm_rtc_device_register(&pdev->dev, pdev->name,&snvs_rtc_ops, THIS_MODULE);调用 devm_rtc_device_register 函数向系统注册 rtc_devcie, RTC 底层驱动集为snvs_rtc_ops。snvs_rtc_ops操作集包含了读取/设置 RTC时间,读取/设置闹钟等函数。
126 static int snvs_rtc_read_time(struct device *dev,
struct rtc_time *tm)
127 {
128 struct snvs_rtc_data *data = dev_get_drvdata(dev);
129 unsigned long time = rtc_read_lp_counter(data);
130
131 rtc_time_to_tm(time, tm);
132
133 return 0;
134 }调用 rtc_read_lp_counter 获取 RTC 计数值,这个时间值是秒数。
调用 rtc_time_to_tm 函数将获取到的秒数转换为时间值,也就是 rtc_time 结构体类型.
rtc_read_lp_counter 函数,此函数用于读取 RTC 计数值:
50 static u32 rtc_read_lp_counter(struct snvs_rtc_data *data)
51 {
52 u64 read1, read2;
53 u32 val;
54
55 do {
56 regmap_read(data->regmap, data->offset + SNVS_LPSRTCMR,
&val);
57 read1 = val;
58 read1 <<= 32;
59 regmap_read(data->regmap, data->offset + SNVS_LPSRTCLR,
&val);
60 read1 |= val;
61
62 regmap_read(data->regmap, data->offset + SNVS_LPSRTCMR,
&val);
63 read2 = val;
64 read2 <<= 32;
65 regmap_read(data->regmap, data->offset + SNVS_LPSRTCLR,
&val);
66 read2 |= val;
67 /*
68 * when CPU/BUS are running at low speed, there is chance that
69 * we never get same value during two consecutive read, so here
70 * we only compare the second value.
71 */
72 } while ((read1 >> CNTR_TO_SECS_SH) != (read2 >>
CNTR_TO_SECS_SH));
73
74 /* Convert 47-bit counter to 32-bit raw second count */
75 return (u32) (read1 >> CNTR_TO_SECS_SH);
76 } 第 56~72 行,读取 RTC_LPSRTCMR 和 RTC_LPSRTCLR 这两个寄存器,得到 RTC 的计数值,单位为秒,这个秒数就是当前时间。这里读取了两次 RTC 计数值,因为要读取两个寄存器,因此可能存在读取第二个寄存器的时候时间数据更新了,导致时间不匹配,因此这里连续读两
次,如果两次的时间值相等那么就表示时间数据有效。
第 75 行,返回时间值,注意这里将前面读取到的 RTC 计数值右移了 15 位。
三、RTC时间查看与设置
1.时间RTC查看
如果要查看时间的话输入“ date”命令即可。
2.设置RTC时间
现在我要设置当前时间为 2019 年 8 月 31 日 18:13:00,因此输入如下命令:
date -s "2019-08-31 18:13:00"
将当前的时间写入到 RTC 里面,这里要用到 hwclock 命令,输入如下命令将系统时间写入到 RTC里面:
hwclock -w //将当前系统时间写入到 RTC 里面
时间写入到 RTC 里面以后就不怕系统重启以后时间丢失了,如果 I.MX6U-ALPHA 开发板
底板接了纽扣电池,那么开发板即使断电了时间也不会丢失。
四、总结
本文为参考正点原子开发板配套教程整理而得,仅用于学习交流使用,不得用于商业用途。