ros的安装
- 安装ROS完整桌面版安装(Desktop-Full)
- 环境配置
- rosdep初始化
安装ROS完整桌面版安装(Desktop-Full)
官网
选择思想者乌龟
选择ubuntu平台


操作
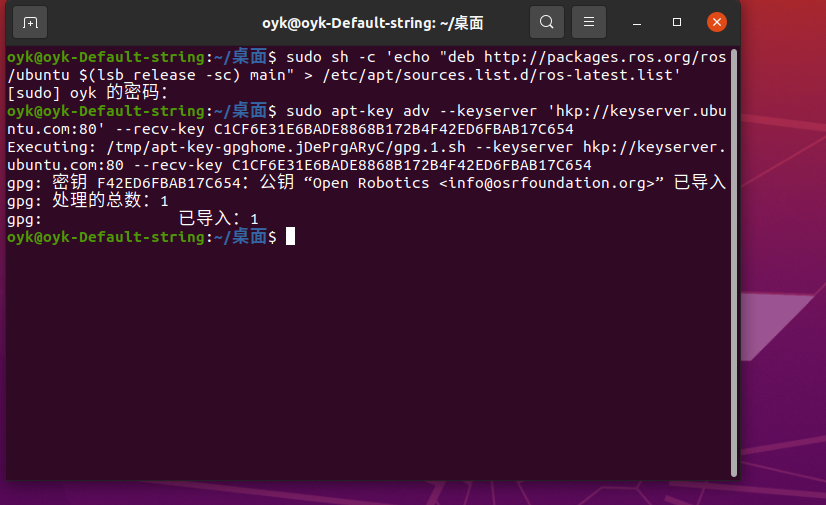
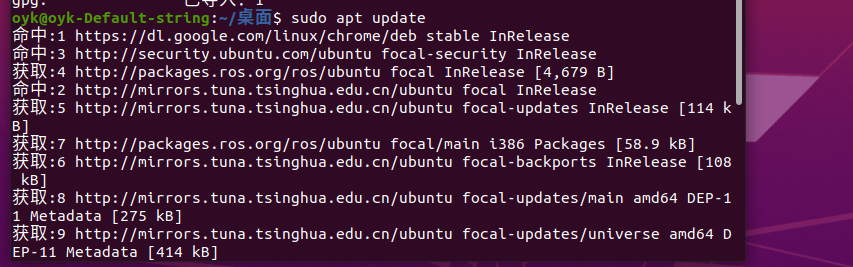
开始安装ROS
完整桌面版安装(Desktop-Full,推荐):除了桌面版的全部组件外,还包括2D/3D模拟器(simulator)和2D/3D 感知包(perception package)。
sudo apt install ros-noetic-desktop-full
大概10多分钟后,完成了安装
环境配置

echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
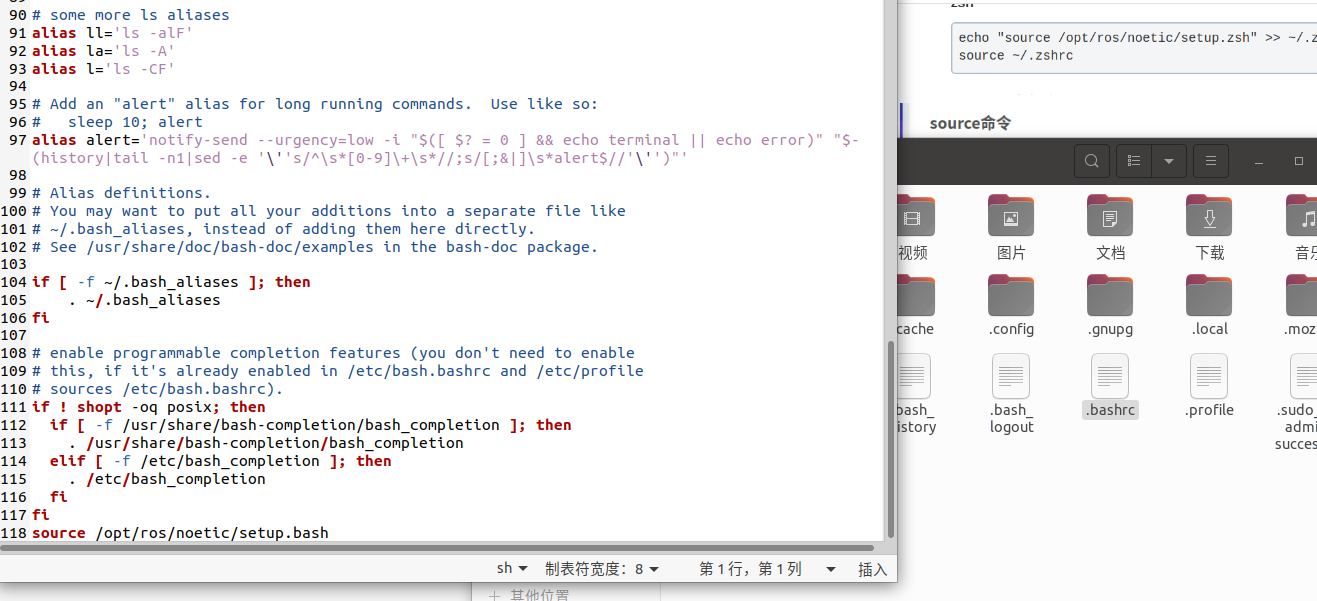
最后一行添加了
最后运行 roscore
rosdep初始化
对ROS依赖包进行初始化,方便安装第三方软件包
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
初始化
sudo rosdep init
出现问题

sudo apt-get install python3-pipsudo pip install rosdepcsudo rosdepc init
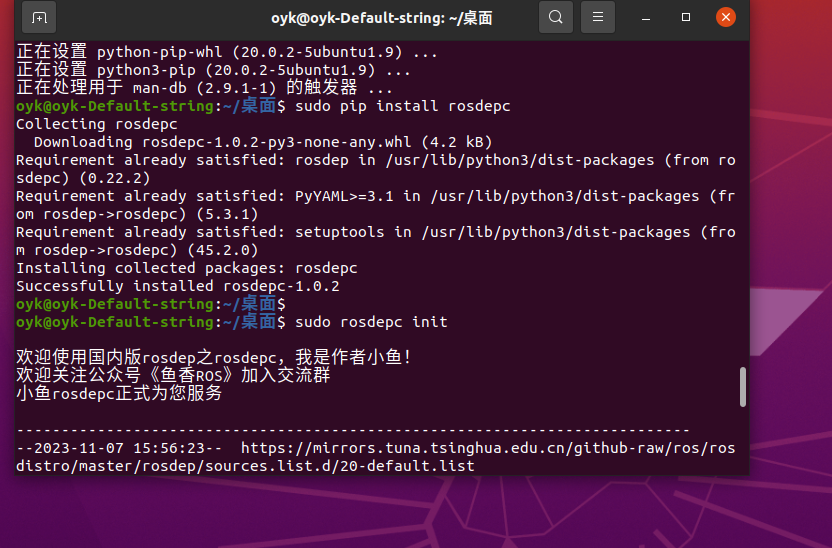
成功初始化
或着这样解决:
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
然后执行:
sudo rosdep init
rosdep update 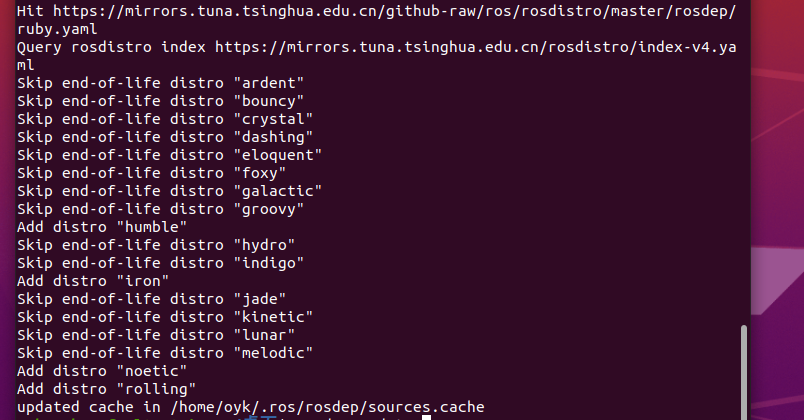
顺利完成了rosdep的初始化
解决方案1:ROS rosdep update更新失败(简单解决)