目录
- 安装ros(如果只是运行ORB-SLAM3,可以跳过安装)
- 0. ros 安装教程
- 1. 安装opencv
- 2. 安装Pangolin
- 3. 安装Eigen3
- 4.安装Python & libssl-dev
- 5.安装boost库
- 6.安装ceres库(不必须)
- 7.安装Sophus库(不必须)
- 8. 安装g20库(不必须)
- 9. 安装DBoW2库(不必须)
本文整体参考链接有:
- ORB-SLAM3配置安装及运行—Ubuntu20.04(2021年)
- Ubuntu20.04 —— 新系统从头安装ORB-SLAM3过程(2022年)
- Ubuntu 20.04配置ORB-SLAM2和ORB-SLAM3运行环境+各种相关库的安装
- ORB-SLAM3配置及安装教程(2023.3)
- Ubuntu 20.04配置ORB-SLAM2和ORB-SLAM3运行环境+ROS实时运行ORB-SLAM+Gazebo仿真运行ORB-SLAM2+各种相关库的安装
安装ros(如果只是运行ORB-SLAM3,可以跳过安装)
0. ros 安装教程
经过测试,这个教程最好[Ubuntu20.04.4安装ROS Noetic详细教程(https://zhuanlan.zhihu.com/p/515361781),推荐参考这个安装ros。 由于后续要安装Anaconda, 因此务必注意先安装ros, 再安装Anaconda, 否则会导致ros的依赖库是Anaconda下的库路径,导致冲突。
1. 安装opencv
具体参考教程参见博客ubuntu20安装opencv4和opencv_contrib 多版本共存,
2. 安装Pangolin
此处需要注意,安装Pangolin 稳定的0.6 版本。
Pangolin_v0.6
直接去github默认下载是下载的最新版本,需要注意最好不要下载最新版本。
1)安装依赖项
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev
sudo apt-get install libpng-dev
(2)配置并编译
cd Pangolin
mkdir build && cd build
cmake ..
make -j8 # 我的是8线程,此处数据需要自己查设置,不同电脑不同
sudo make install
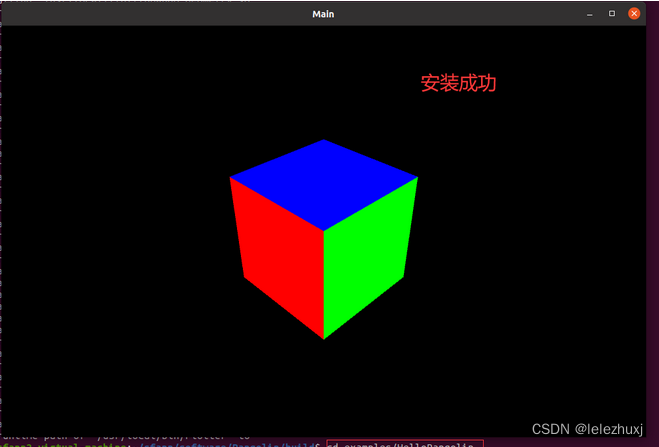
(3) 检查是否安装成功
cd examples/HelloPangolin
cmake .
make
./HelloPangolin
3. 安装Eigen3
推荐版本安装3.3.4, 不过也有推荐版本3.3.7,要求最低版本是大于等于3.3.3,看个人需要吧。cd 指令需要进到自己的下载解压后的eigen文件夹处,注意替换该指令。
cmake ..指令默认安装位置为/urs/local/,以下为后续fmt安装界面,库路径为/usr/local/lib, include路径为/usr/local/include/, 可作为参考:ORB-SLAM中的依赖库默认安装在/usr下,有特殊指明安装位置的除外,例如opencv安装位置就指明了安装位置,具体可以参考cmake 指令中参数的设置意义。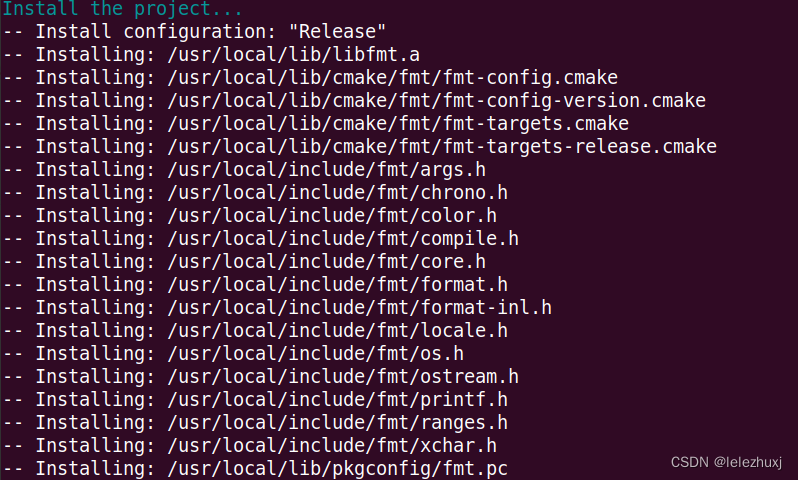
#github 有个mirror,版本3.3.4 from 2017
git clone https://github.com/eigenteam/eigen-git-mirror#安装
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install#安装后,头文件安装在/usr/local/include/eigen3/
注意!!!
不要采用下面这个指令安装eigen3,
sudo apt-get install libeigen3-dev
如果采用这个指令安装,默认是安装到了/usr/include/eigen3,ORB-SLAM3检测不到,导致编译会报错。利用源码安装,安装好的路径是 /usr/local/include/eigen3/>
4.安装Python & libssl-dev
sudo apt install libpython2.7-dev
sudo apt-get install libssl-dev
5.安装boost库
Boost 是一个功能强大、构造精巧、跨平台、开源并且完全免费的 C++ 程序库。
进入boost官网:https://www.boost.org/
或者和我下载一样的下载的是1.75.0
此处安装参考链接:
- Ubuntu20.04 —— 新系统从头安装ORB-SLAM3过程(2022年)
- Ubuntu20.04安装boost库
6.安装ceres库(不必须)
因为后续要运行PL-SLAM,才安装这个库。安装版本ceres-1.14.0版本。
参考链接:Ubuntu20.04安装Ceres和g2o库
7.安装Sophus库(不必须)
参考链接:高翔视觉SLAM十四讲Sophus安装指南(经历)
由于最新的Sophus是模板类的,需要fmt库支持,根据踩坑经验,建议安装8.1.1版本的,否则将导致Sophus安装失败.
Sophus安装1.22.4。
8. 安装g20库(不必须)
参考链接:Ubuntu20.04安装Ceres和g2o库,安装版本是20201223版本。
9. 安装DBoW2库(不必须)
参考链接:Ubuntu环境下安装DBoW2