由亿欧汽车主办“AI与新一代车载智能感知融合创新论坛”近日登陆2023世界人工智能大会(WAIC)。觉非科技CEO李东旻受邀发表了“智能驾驶向大模型的进化与感知决策新范式的诞生”主题演讲,从产业趋势结合技术发展特点以及在感知决策中的能力应用等角度进行了系统化介绍。
觉非科技:自动驾驶量产时代的软件Tier1
李东旻首先就“软件定义汽车”背后的核心驱动力进行了阐释。首先,整个汽车的电子电气架构已经基本转向了大算力平台与中央软件平台结合的架构,这使得以软件为核心的解决方案得以“上车”。

其次,国内主机厂正在不断增加对自动驾驶技术的投入,以确保响应快速的迭代周期,而这也为软件的发展带来了不断扩展的蓝海空间。
与此同时,AI模型将进一步影响汽车数字化程度,车辆软件功能与OTA将主要围绕数字化进行升级,且未来大部分升级将在软件层面进行,而不论是大模型还是小模型,都将使汽车越来越趋近于数字化产品,这种转变带来的化学反应和新产品形态,将在未来发展中具备巨大的潜力。
自动驾驶向大模型的进化
演讲中,李东旻介绍了自动驾驶发展的不同阶段。在第一阶段中,智能驾驶解决方案依靠的是各个小模型的堆叠,也就是通过多个独立“小模型”构成自动驾驶的感知、跟踪、融合、预测等能力,而这也是现阶段自动驾驶解决方案的主要输出方式。
觉非科技的融合定位能力、激光点云融合感知能力即是自动驾驶小模型的典型代表。

“从2022年开始,觉非科技的融合定位产品就已经开始量产上车。”李东旻提到。觉非在自动驾驶车辆的定位上,融合了激光点云或者视觉感知信息、车身信号与高精度地图数据,通过适配层、算法支撑层与融合层,将多种车辆信息与环境信息进行实时数据融合计算,可应对各类道路复杂场景。
在这个阶段中,觉非科技业界首创完成了3D SPConv(稀疏卷积)在嵌入式平台的移植和优化,并完成了全息路口超大规模点云感知。感知范围可覆盖10万+平米超大场景,单帧可完成超过500个目标输出,不断提升着自动驾驶的安全性与鲁棒性。
在第一阶段中,觉非科技通过在算法、数据上的积累,为第二阶段,即“自动驾驶大模型与大数据方案”的到来,创造了先天的优势与壁垒。
而在大模型的部署上,难点在于算力与数据的支持。举例而言,大模型所需的数据量通常是小模型的100倍以上,以前如果用10万帧或100万帧的数据训练就可以达到量产标准,而现在大模型则需要至少10亿帧的数据作为起点。
“整个行业在自动驾驶技术路径上达成了惊人的共识,即都希望在自己的技术路径上使用Transformer大模型。因此无论是新势力还是传统主机厂,都在自研或与觉非这样的合作伙伴进行技术合作,开展大模型的研发与量产。”李东旻提到。
通过在车端与路侧的大量技术实践,觉非积累了覆盖不同场景的自动驾驶数据集,并转化成了数据服务平台,为大模型的发展奠定了坚实的技术基础。
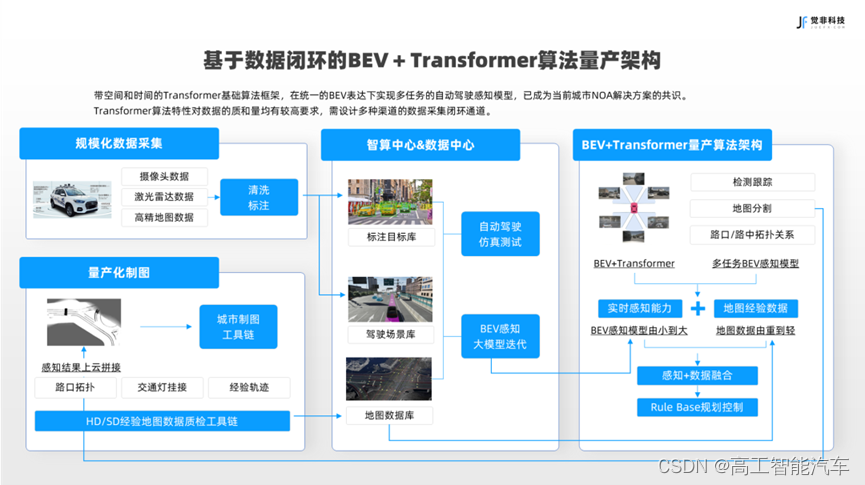
近期觉非也推出了BEV+Transformer算法量产架构。这套量产架构通过规模化数据采集,生成冷启动模型,而后通过量产化制图能力产生地图数据库,结合觉非自研的数据中心实现快速不断的迭代,供给生成BEV+Transformer的算法训练数据,进而实现大模型的正向循环。
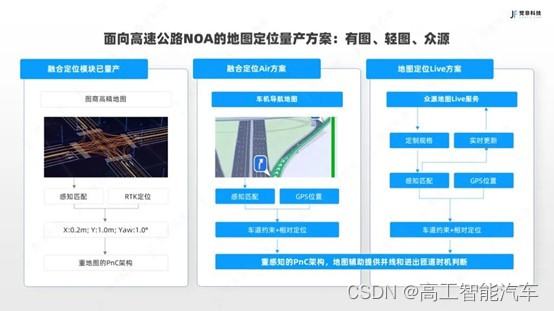
在这套量产架构的支撑下,觉非同时推出了面向高速NOA的地图定位量产方案。方案通过车机导航地图或众源地图,结合量产车实时感知结果,可满足车辆在高速场景下的高精定位需求。

“大模型的出现将带动包含自动驾驶在内的整个科技生态链的变革:软件吞噬世界,平台吞噬软件,云吞噬平台。而这条科技食物链正迎来一位新的霸主,大模型正在吞噬云。很多玩家正在把精力放到大模型的应用上,也就是自动驾驶的各类衍生功能,而未来真正的核心玩家,则是奔着大模型的底层路线去探索,这个底层路线包含了大数据、算力布局、数据传输等等问题。”李东旻提到。
对于觉非科技而言,大模型将引发技术原生能力的不断提升,也就是以大模型为基础,开发自动驾驶相关能力与原生技术方案,这同时也让觉非拥有了颠覆与创新的新机会。而对于大模型成为产业应用与基座,还需要有场景深度融合的体系以及开放的生态来激发创新。觉非科技希望能够携手更多合作伙伴,共同推动正在发生着的产业技术变革。