目录
- PWM的代码
- pwm.c
- pwm.h
- main.c
说明:以下内容参考正点原子的资料
PWM的代码
pwm.c
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
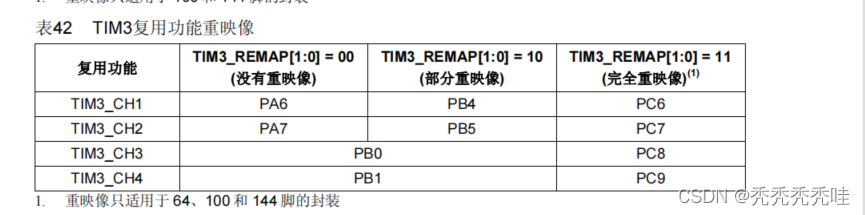
{ GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5 //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO//初始化TIM3TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位//初始化TIM3 Channel2 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器TIM_Cmd(TIM3, ENABLE); //使能TIM3}
pwm.h
#ifndef __TIMER_H
#define __TIMER_H#include "sys.h"
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif
main.c
int main(void){ u16 led0pwmval=0;u8 dir=1; delay_init(); //延时函数初始化 TIM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khzwhile(1){delay_ms(10); if(dir)led0pwmval++;else led0pwmval--;if(led0pwmval>200)dir=0;if(led0pwmval==0)dir=1; TIM_SetCompare2(TIM3,led0pwmval); } }


![已解决 BrokenPipeError: [Errno 32] Broken pipe](https://img-blog.csdnimg.cn/5c362be60c6c42fbb7bec33aa09ecb1e.png)