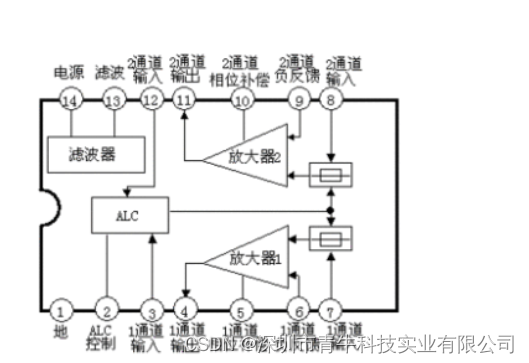
一块双极性集成电路芯片 D7312。可用于小型收录机中作前置放大电路。
主要特点:
● 含ALC电路和ALC检波电路。
● 外接元件少。
● 增益高,噪声低。
● 静态电流小
● 电源开关冲击噪音小、 反应快
● 具有过热保护功能
● 封装形式:DIP14
应用:
● 收录机
一块双极性集成电路芯片 D7312。可用于小型收录机中作前置放大电路。
主要特点:
● 含ALC电路和ALC检波电路。
● 外接元件少。
● 增益高,噪声低。
● 静态电流小
● 电源开关冲击噪音小、 反应快
● 具有过热保护功能
● 封装形式:DIP14
应用:
● 收录机
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/188740.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!