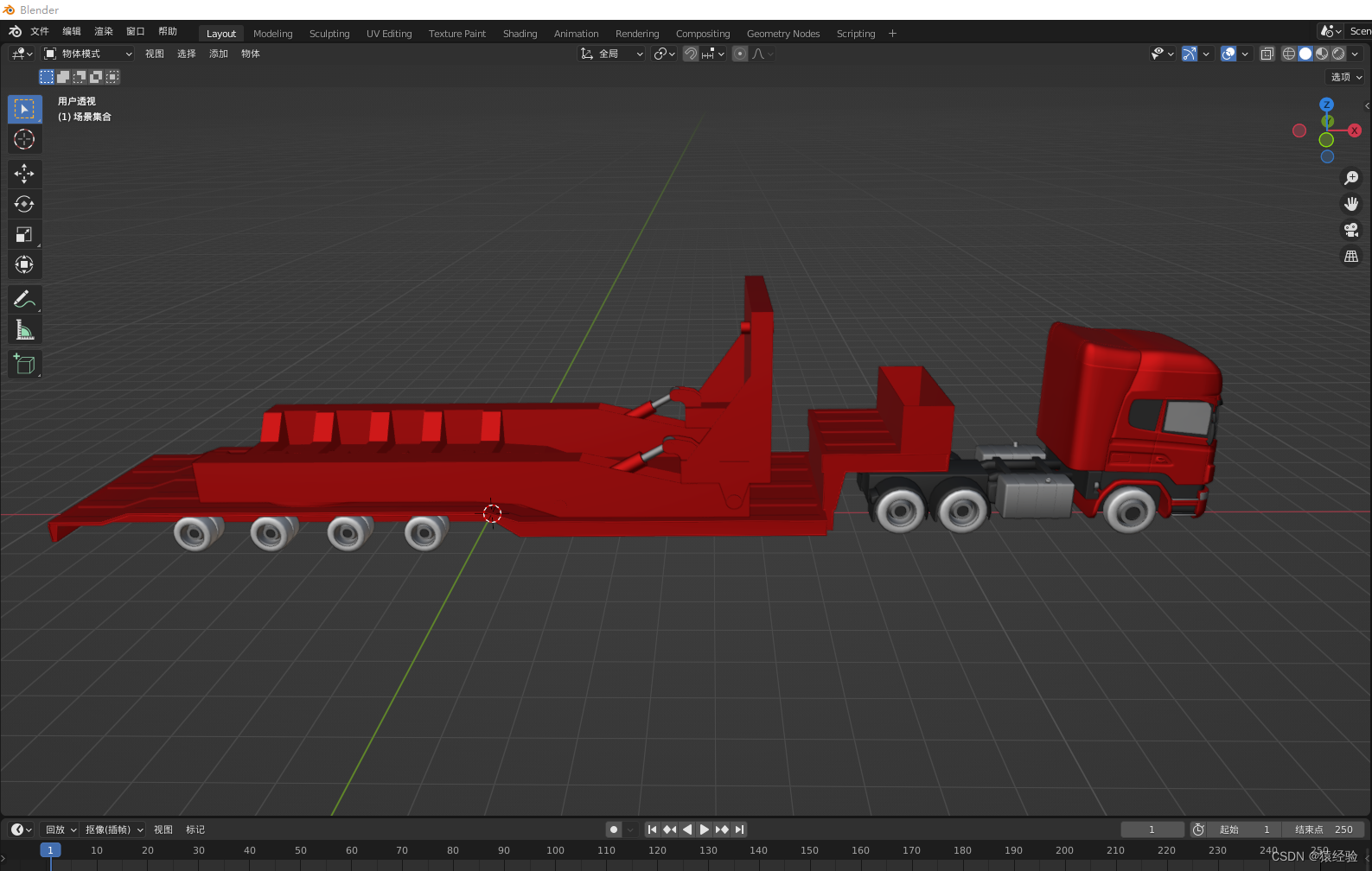
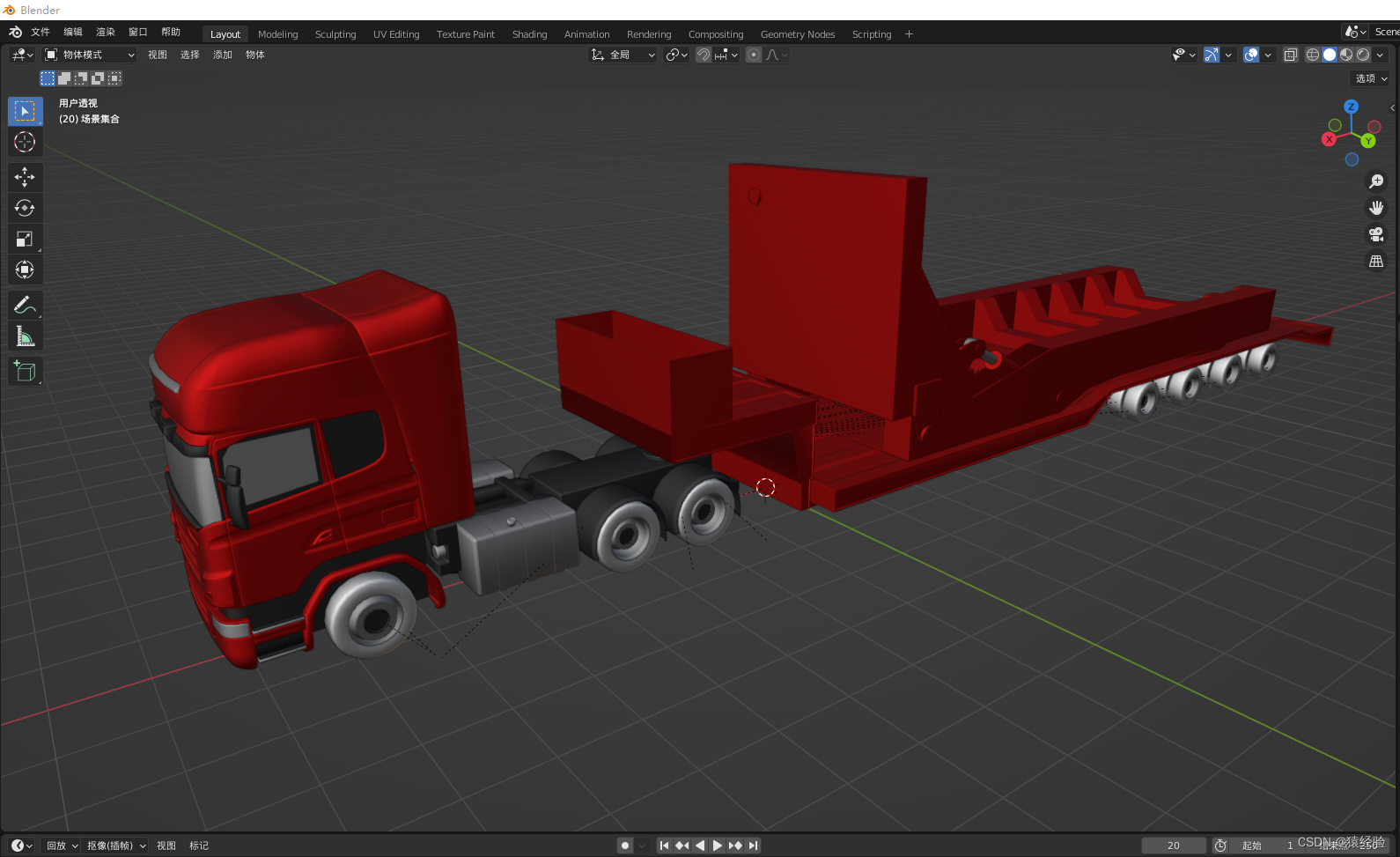
风电场叶片运输车模型-FBX格式-带动画-数字孪生场景搭建
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/208907.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
visionOS空间计算实战开发教程Day 4 初识ImmersiveSpace
细心的读者会发现在在Day1和Day2的示例中我们使用的都是WindowGroup。
main
struct visionOSDemoApp: App {var body: some Scene {WindowGroup {ContentView()}}
}
本节我们来认识在visionOS开发中会经常用到的另一个概念ImmersiveSpace…
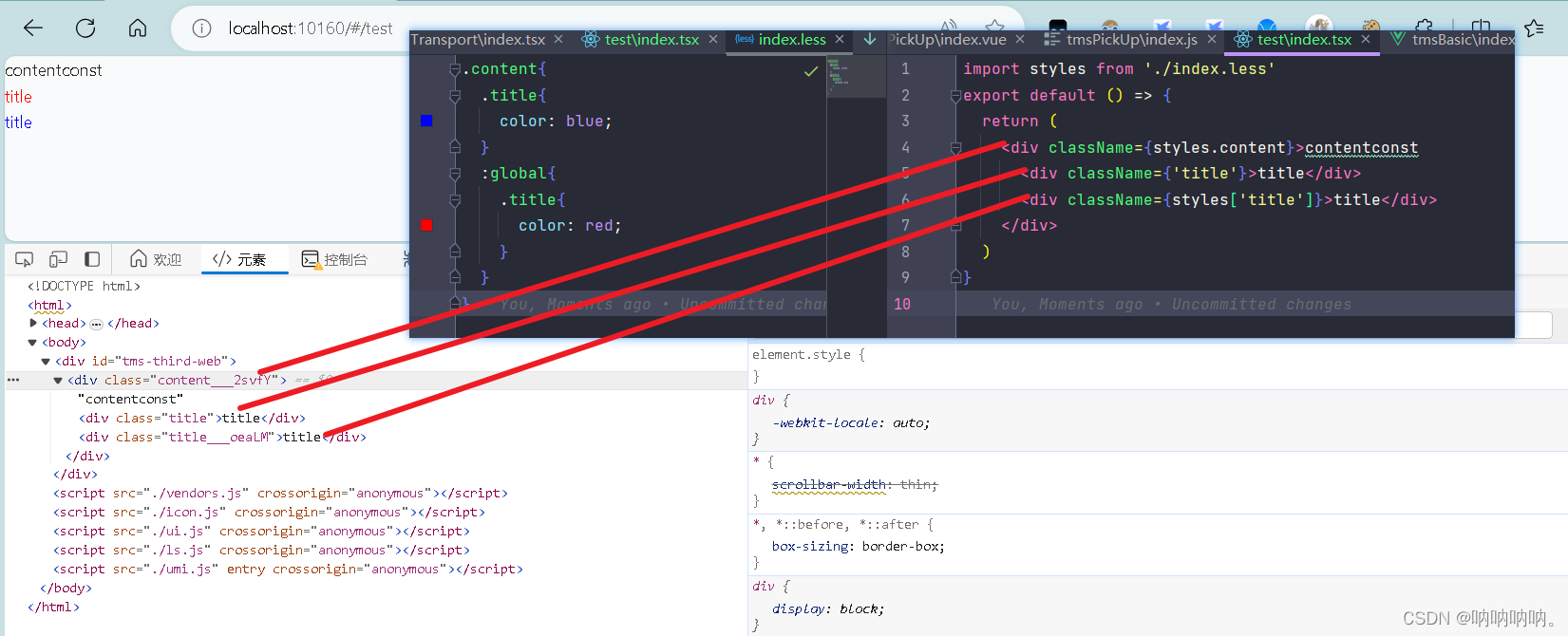
react中模块化样式中:global的作用
在react中如果是通过import styles from ./index.less这种方式模块化引入样式的话,那么编译后的less文件里的样式名都会自动添加后缀。而:global的作用就是不让类名添加后缀

2023年03月 Scratch(二级)真题解析#中国电子学会#全国青少年软件编程等级考试
Scratch等级考试(1~4级)全部真题・点这里 一、单选题(共25题,每题2分,共50分)
第1题
小猫的程序如图所示,积木块的颜色与球的颜色一致。点击绿旗执行程序后,下列说法正确的是?( ) A:小猫一直在左右移动,嘴里一直说着“抓到了”。 B:小猫会碰到球,然后停止。…

《QT从基础到进阶·三十八》QWidget实现炫酷log日志打印界面
QWidget实现了log日志的打印功能,不仅可以在界面显示,还可以生成打印日志。先来看下效果,源码放在文章末尾:
LogPlugin插件类管理log所有功能,它可以获取Log界面并能打印正常信息,警告信息和错误信息&…

加入破局 180 天,成功立起 IP
大家好,我是破局合伙人木川 在成为破局合伙人之前,我就是那个两三年不怎么发朋友圈的人,成为破局合伙人之后,开始日更朋友圈 在成为破局合伙人之前,我就是那个喜欢单打独斗的人,成为破局合伙人之后…
Unity UI设计 软件构造实验报告
实验1: 仿真系统的UI主界面设计 1.实验目的
(1)熟悉Unity中UI界面的设计与编写;
(2)熟悉UI界面中场景转换,UI与场景内容相互关联的方式。
(3)熟悉Unity中MySQL数据库的操作
2.实验内容
新建…
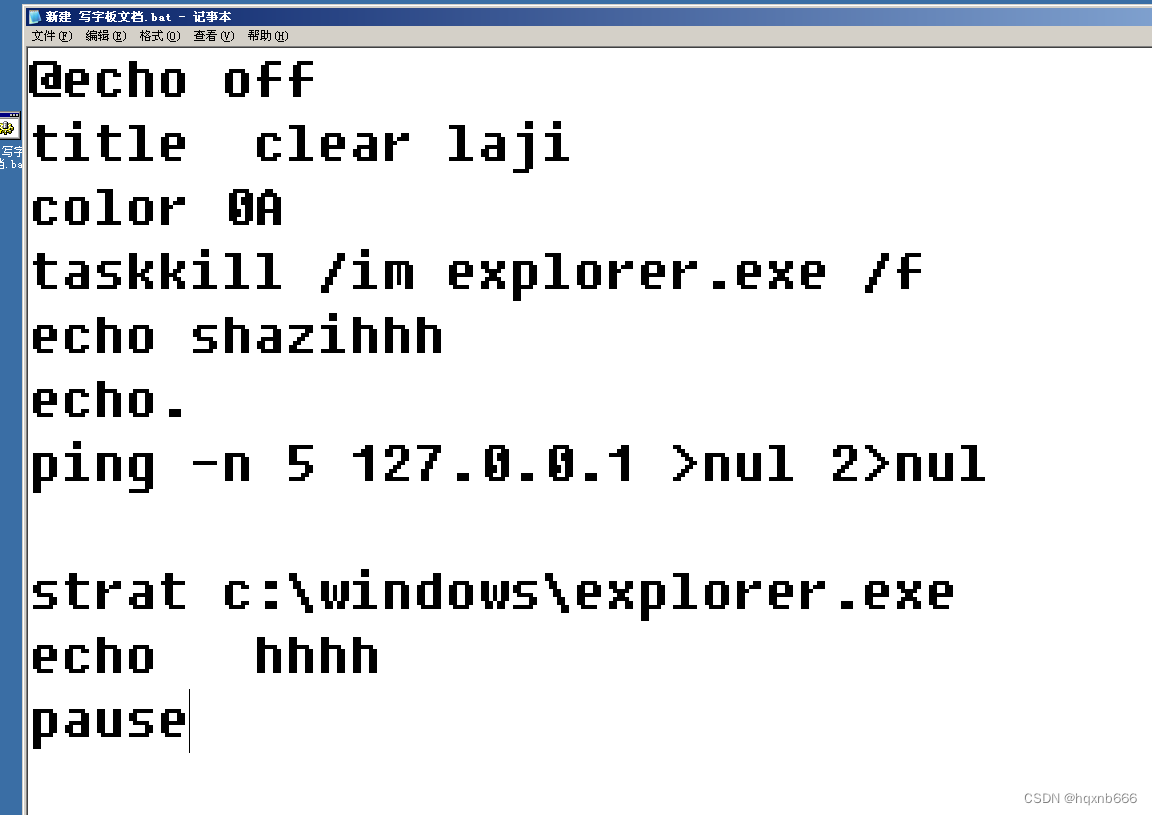
深入了解批处理文件:从基础到实例
1. 什么是批处理文件?
批处理文件是一种包含一系列命令的文本文件,通常用于自动化执行一系列任务。在不同操作系统中,批处理也有不同的名称,如在Windows中被称为批处理文件(.bat),而在Linux中则…

PTA-输出三角形面积和周长
本题要求编写程序,根据输入的三角形的三条边a、b、c,计算并输出面积和周长。注意:在一个三角形中, 任意两边之和大于第三边。三角形面积计算公式:areas(s−a)(s−b)(s−c),其中s(abc)/2。
输入格式&…

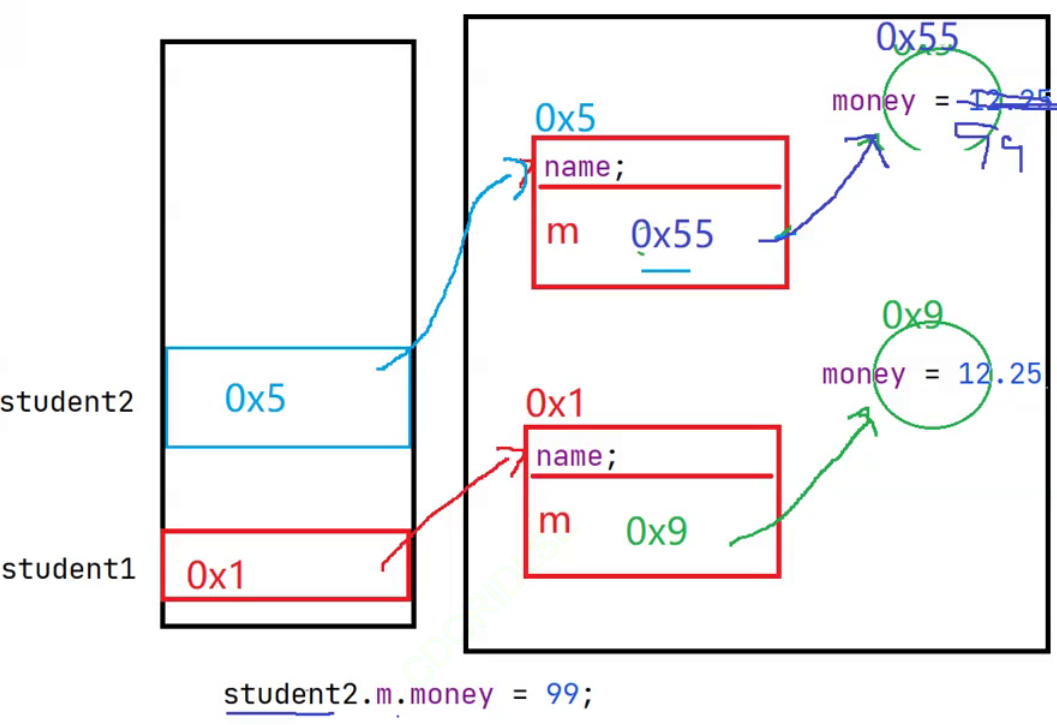
8-cgi fastcgi wsgi uwsgi uWSGI 分别是什么?如何自定制上下文管理器、Python是值传递还是引用传递
1 cgi fastcgi wsgi uwsgi uWSGI 分别是什么? 2 如何自定制上下文管理器 3 Python是值传递还是引用传递 1 cgi fastcgi wsgi uwsgi uWSGI 分别是什么? # CGI:通用网关接口(Common Gateway Interface/CGI),CGI描述了服务器…
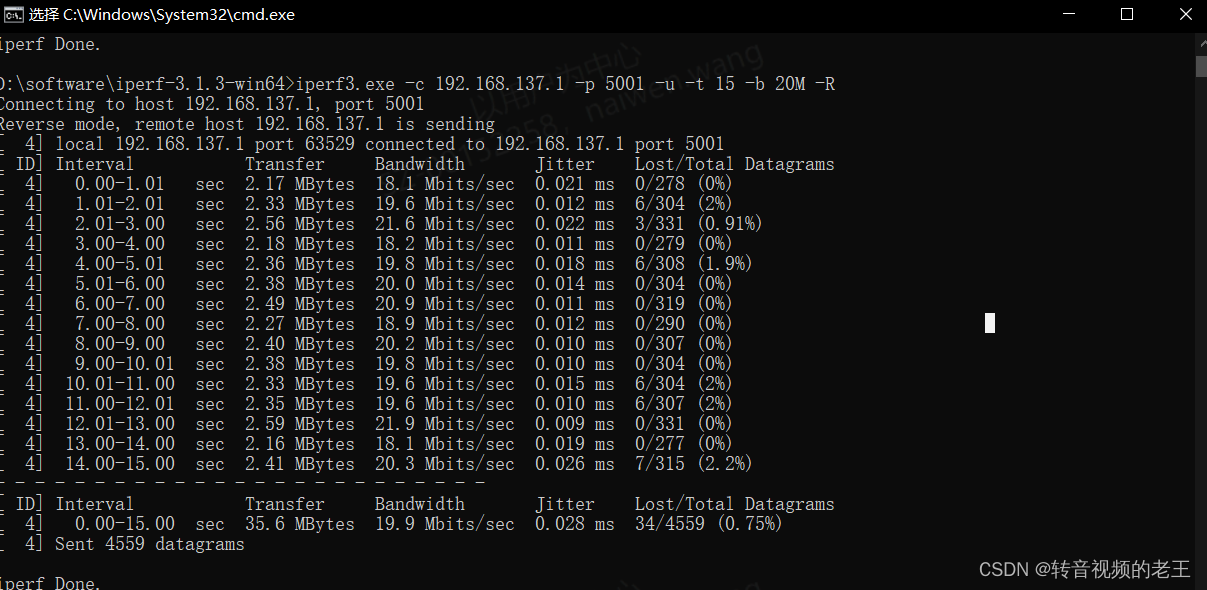
iperf3 网络测试
iperf3 测试网络的上下行带宽
下载地址 https://iperf.fr/iperf-download.php
开启服务器 开启客户端
常用命令
-c 代表客户端-s 代表服务端-u 代表 udp-r 代表数据方向是否反向
https://baijiahao.baidu.com/s?id1731514357681464971&wfrspider&forpc