AVL树的实现
- 底层结构
- 1. AVL的概念
- 2. AVL树节点的定义
- 3. AVL树的插入
- 分析
- 4. AVL树的旋转
- 4.1 新节点插入较高右子树的右侧---右右:左单旋
- 4.2 新节点插入较高左子树的左侧---左左:右单旋
- 4.3 新节点插入较高右子树的左侧---右左:先右单旋再左单旋(右左双旋)
- 4.4 新节点插入较高左子树的右侧---左右:先左单旋再右单旋(左右双旋)
- 5. 整体代码:
- 6. AVL树的验证
- 1.验证其为二叉搜索树
- 2.验证其为平衡树
- 7. AVL树的性能
底层结构
map和set的使用 ---- multiset和multimap
我们已经比较了解map/multimap/set/multiset,在其文档介绍中发现,这几个容器有个共同点是:其底层都是按照二叉搜索树来实现的,但是二叉搜索树有其自身的缺陷,假如往树中插入的元素有序或者接近有序,二叉搜索树就会退化成单支树,时间复杂度会退化成O(N),因此map、set等关联式容器的底层结构是对二叉树进行了平衡处理,即采用平衡树来实现。
1. AVL的概念
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
- 它的左右子树都是AVL树
- 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
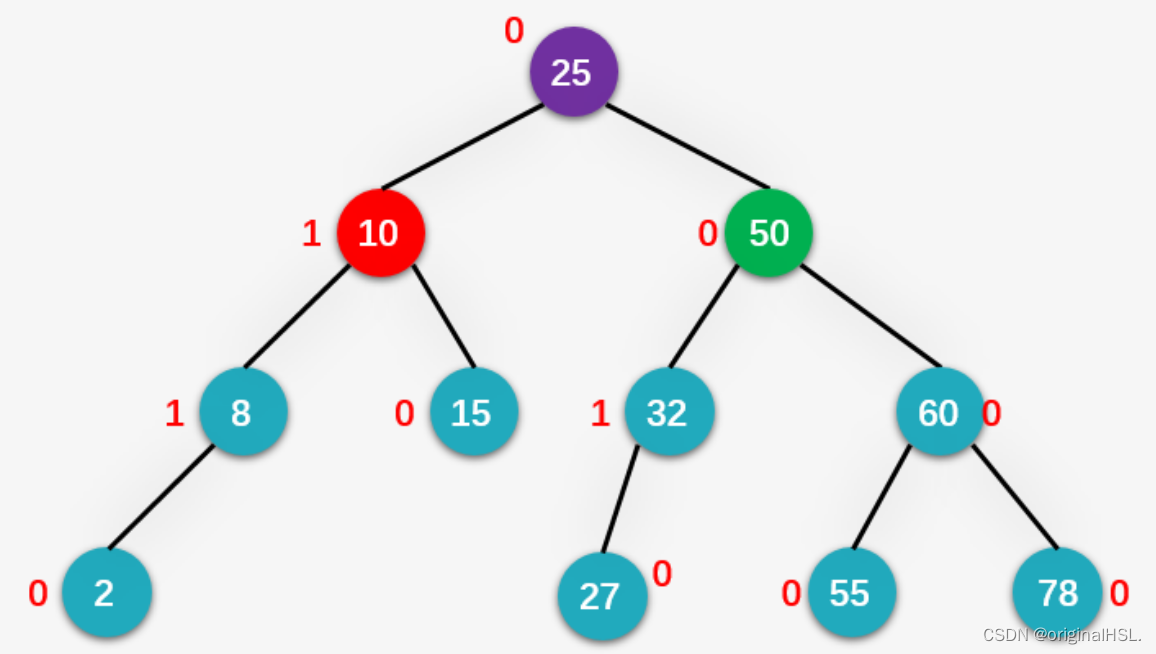
如果一棵二叉搜索树是高度平衡的,它就是AVL树。如果它有n个结点,其高度可保持在 O ( l o g 2 n ) O(log_2 n) O(log2n),搜索时间复杂度O( l o g 2 n log_2 n log2n)。
2. AVL树节点的定义
template <class K, class V>
struct AVLTreeNode
{AVLTreeNode<K,V>* _left;//左孩子节点AVLTreeNode<K,V>* _right;//右孩子节点AVLTreeNode<K,V>* _parent;//父亲节点pair<K, V> _kv; //存储键值对的pair对象,其中K表示键的类型,V表示值的类型。int _bf;//该节点的平衡因子:高度差AVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr),_kv(kv),_bf(0){}
};
结构体中包含以下成员变量:
- _left:指向左孩子节点的指针。
- _right:指向右孩子节点的指针。
- _parent:指向父节点的指针。
- _kv:存储键值对的pair对象,其中K表示键的类型,V表示值的类型。
- _bf:该节点的平衡因子,用于衡量左右子树高度差。
结构体中还定义了一个构造函数AVLTreeNode(const pair<K, V>& kv),用于初始化节点对象。构造函数会对成员变量进行初始化,其中:
- _left、_right、_parent被初始化为nullptr,表示当前节点没有左孩子、右孩子和父节点。
- _kv被初始化为传入的键值对对象kv。
- _bf被初始化为0,表示当前节点的平衡因子为0。
- 通过这个结构体,可以创建AVL树的节点对象,并且使用成员变量来访问和修改节点的属性。
3. AVL树的插入
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。那么AVL树的插入过程可以分为两步:
- 按照二叉搜索树的方式插入新节点
- 调整节点的平衡因子
先创建一个AVLTree的类
注:本文定义的函数全部都在AVLTree类中
//class默认是private
template <class K,class V>
class AVLTree
{
typedef AVLTreeNode<K, V> Node;
public:bool insert(const pair<K,V>& kv){}//....private:Node* _root = nullptr;
};
首先是普通搜索树的常规插入操作
bool insert(const pair<K,V>& kv)
{if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else{return false;}}cur = new Node(kv);if (kv.first < parent->_kv.first){parent->_left = cur;cur->_parent = parent;}if (kv.first > parent->_kv.first){parent->_right = cur;cur->_parent = parent;}///AVL的开始..........return true;
}
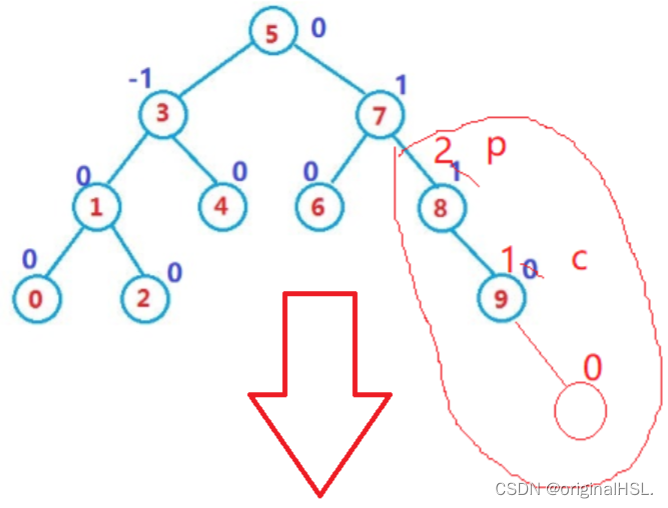
分析
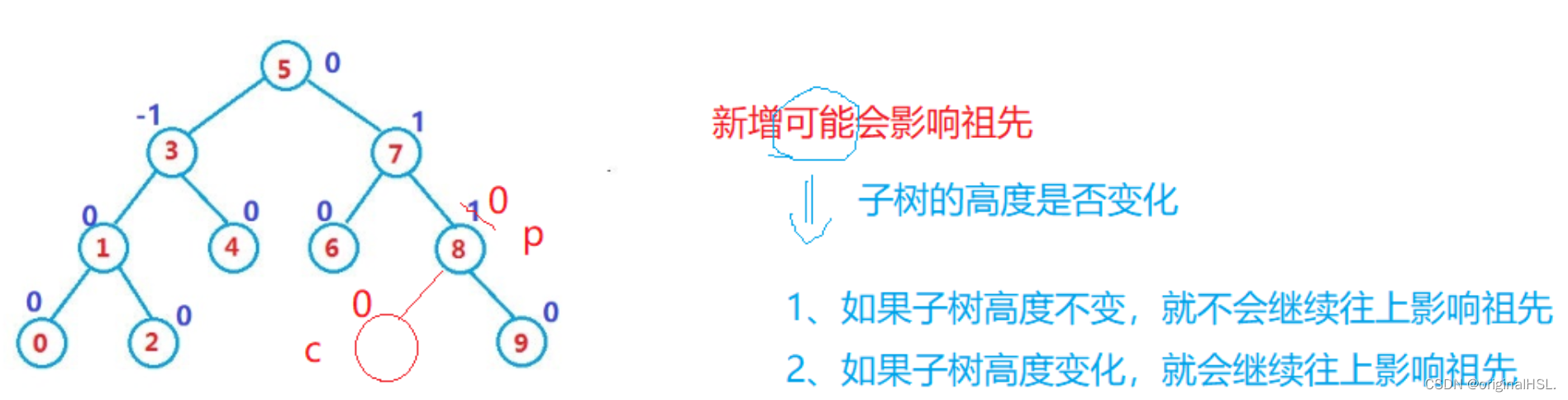
如果影响祖先,怎么影响?分析如下:
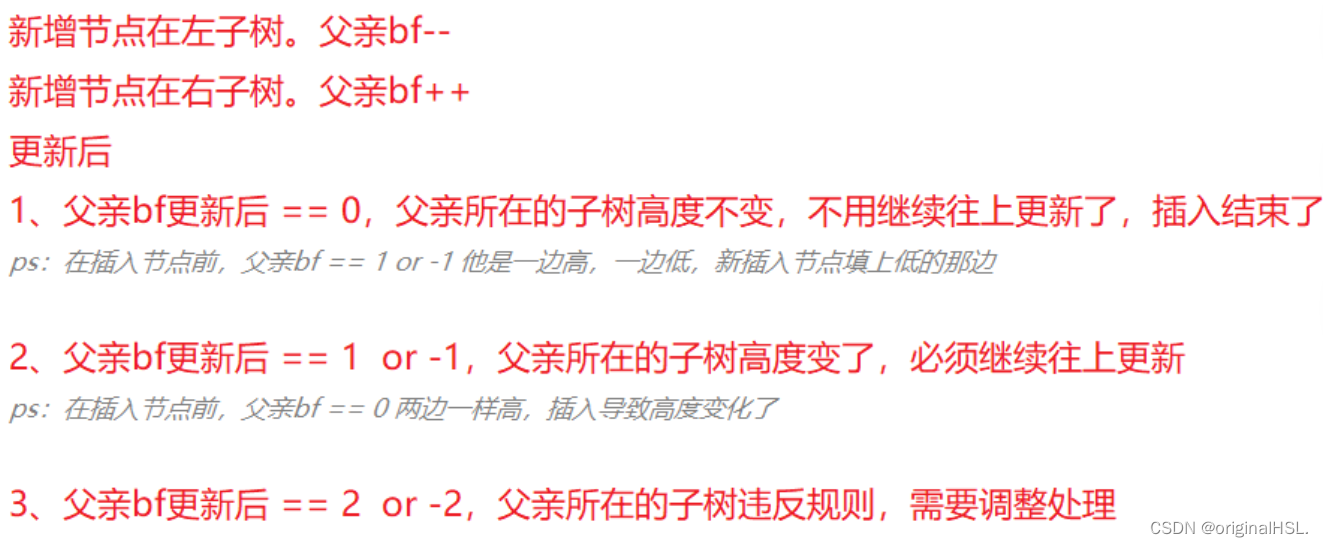
现在可以把AVL的插入操作大概框架写一下了:
bool insert(const pair<K,V>& kv)
{if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else{return false;}}cur = new Node(kv);if (kv.first < parent->_kv.first){parent->_left = cur;cur->_parent = parent;}if (kv.first > parent->_kv.first){parent->_right = cur;cur->_parent = parent;}/////AVL的开始while (parent){// 更新双亲的平衡因子if (cur == parent->_left){parent->_bf--;} else{parent->_bf++;}//说明更新前是-1或者1,并且更新后父节点左右平衡,不用继续往上更新了if (parent->_bf == 0){break;}//说明更新前bf是0,必须往上进行更新else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}//说明更新前是-1或者1,并且更新后的子树违反了AVL树的规则,需要进行调整else if(parent->_bf == 2 || parent->_bf == -2){//调整处理//........}}return true;
}情况1一和情况二都好说
重点在于情况三的调整,下面将重点介绍调整的思路:“旋转”
4. AVL树的旋转
如果在一棵原本是平衡的AVL树中插入一个新节点,可能造成不平衡,此时必须调整树的结构,使之平衡化。根据节点插入位置的不同,AVL树的旋转分为四种:
4.1 新节点插入较高右子树的右侧—右右:左单旋
思路:
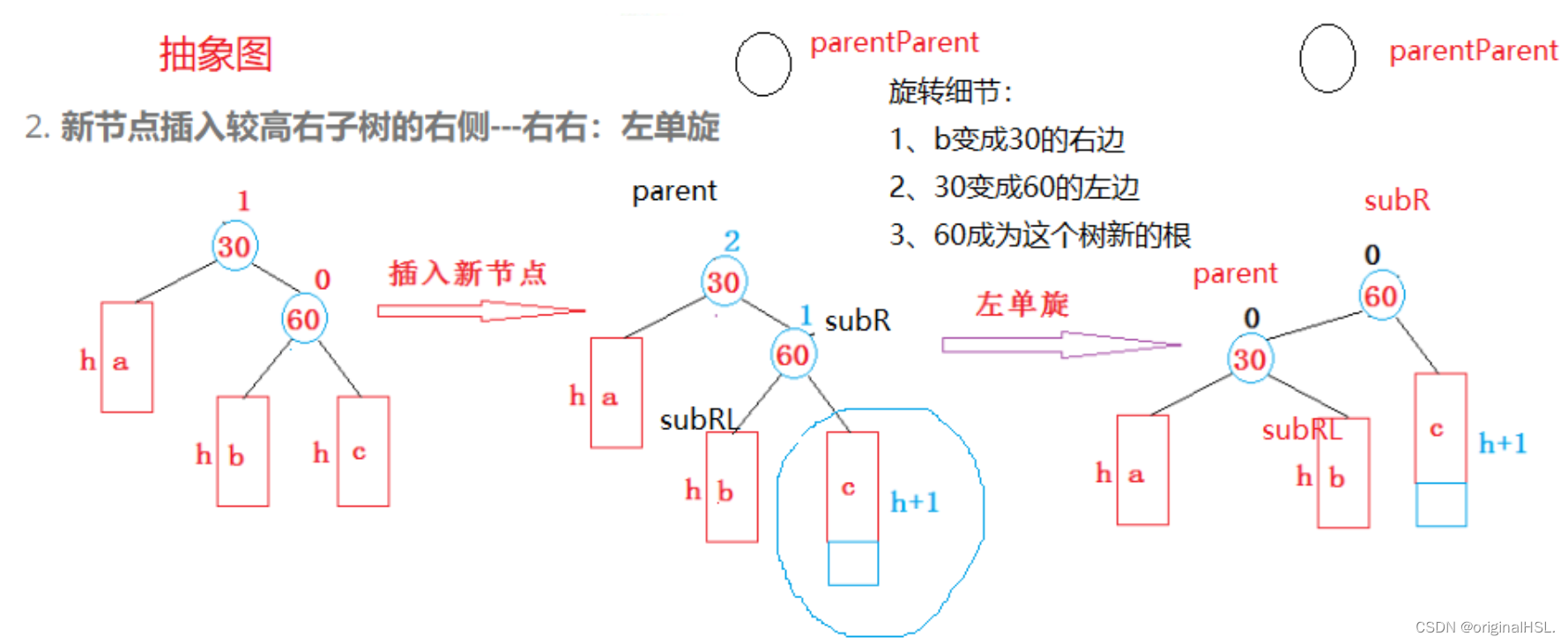
- 将父节点的右孩子保存为SubR,将SubR的左孩子保存为SubRL。
- 旋转链接,将SubRL作为父节点的右孩子,将父节点作为SubR的左孩子。
- 获取父节点的父节点,并根据情况将SubR连接到父节点的父节点的相应位置。
- 更新旋转后节点的平衡因子为0。
//左单旋
//(1.父亲节点的右边等于右孩子的左边; 2.右孩子的左边等于父亲节点)
//【把右孩子的左边给给父亲节点的右边; 2.再把父亲节点给给右孩子的左边】
void RotateL(Node *parent)
{Node* SubR = parent->_right;// 将父节点的右孩子保存为SubRNode* SubRL = SubR->_left;// 将SubR的左孩子保存为SubRL//旋转链接parent->_right = SubRL;// 将SubRL作为父节点的右孩子SubR->_left = parent; // 将父节点作为SubR的左孩子Node* Parent_Parent = parent->_parent;// 获取父节点的父节点parent->_parent = SubR; // 将SubR作为父节点的父节点if (SubRL){// 如果SubRL存在,则将其父节点指针指向父节点SubRL->_parent = parent;}//和父节点的父节点链接if (_root == parent){_root = SubR;// 如果parent是根节点,将SubR设为新的根节点SubR->_parent = nullptr;// 新的根节点的父节点指针设为nullptr}else{if (Parent_Parent->_left == parent){// 将SubR作为父节点的父节点的左孩子Parent_Parent->_left = SubR;}else{// 将SubR作为父节点的父节点的右孩子Parent_Parent->_right = SubR;}SubR->_parent = Parent_Parent;// 将SubR的父节点指针指向父节点的父节点}//更新平衡因子SubR->_bf = parent->_bf = 0;
}
4.2 新节点插入较高左子树的左侧—左左:右单旋
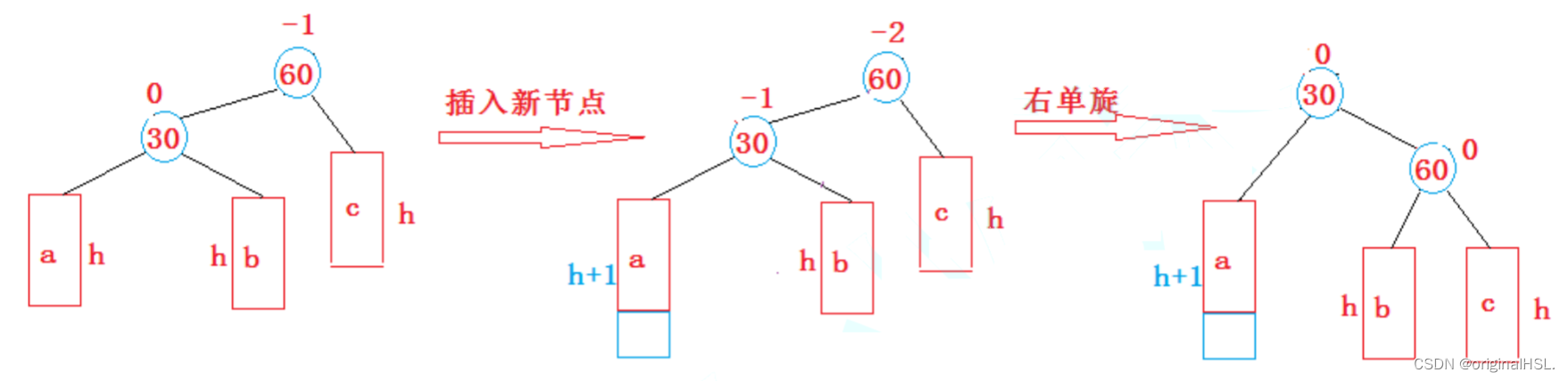
右单旋和左单旋完全类似:老铁们可以参考左单旋先写一遍再来看代码
思路:
- 将父节点的左孩子保存为SubL,将SubL的右孩子保存为SubLR。
- 旋转链接,将SubLR作为父节点的左孩子,将父节点作为SubL的右孩子。
- 获取父节点的父节点,并根据情况将SubL连接到父节点的父节点的相应位置。
- 更新旋转后节点的平衡因子为0。
//右单旋
void RotateR(Node* parent)
{Node* SubL = parent->_left;Node* SubLR = SubL->_right;//旋转链接//动一个节点就把他的父亲也变动parent->_left = SubLR;if (SubLR)//SubLR可能为空{SubLR->_parent = parent;}Node* Parent_Parent = parent->_parent;SubL->_right = parent;parent->_parent = SubL; //和父节点的父节点链接if (_root == parent){_root = SubL;SubL->_parent = nullptr;}else{if (Parent_Parent->_left == parent){Parent_Parent->_left = SubL;}else{Parent_Parent->_right = SubL;}SubL->_parent = Parent_Parent;//链接}SubL->_bf = parent->_bf = 0;//更新平衡因子
}
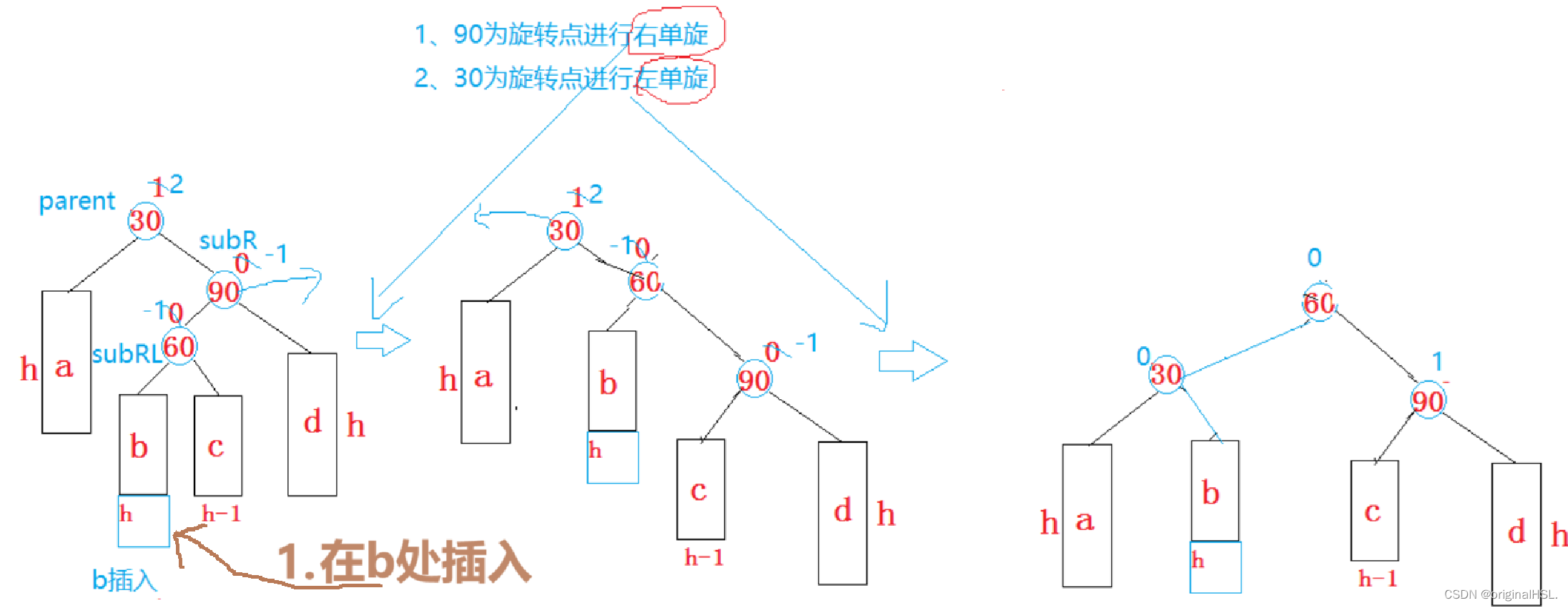
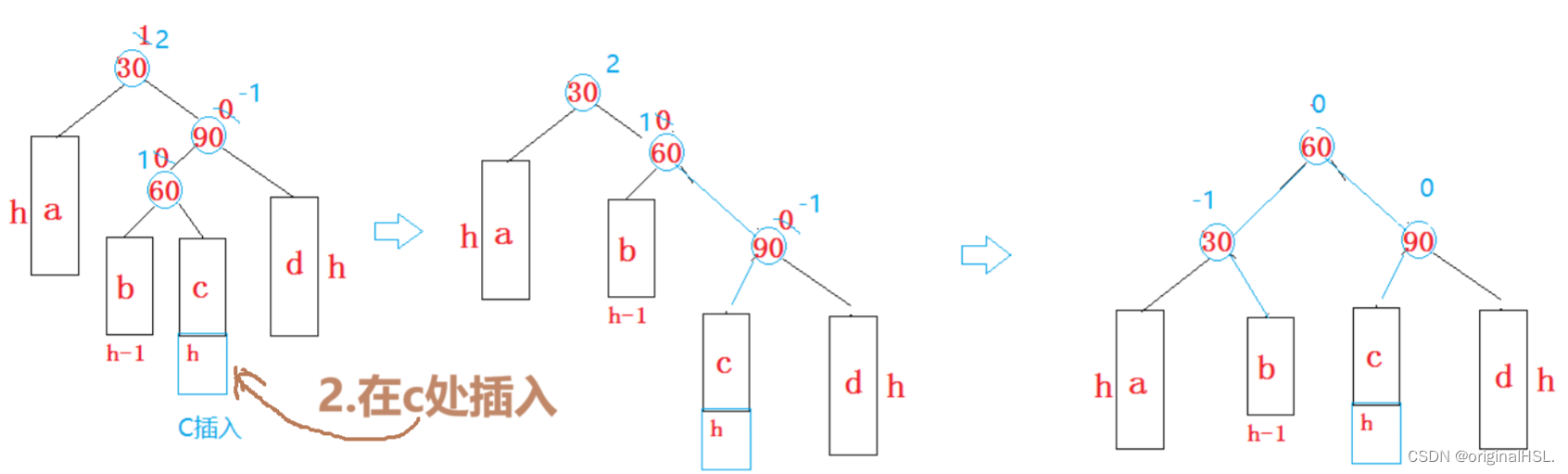
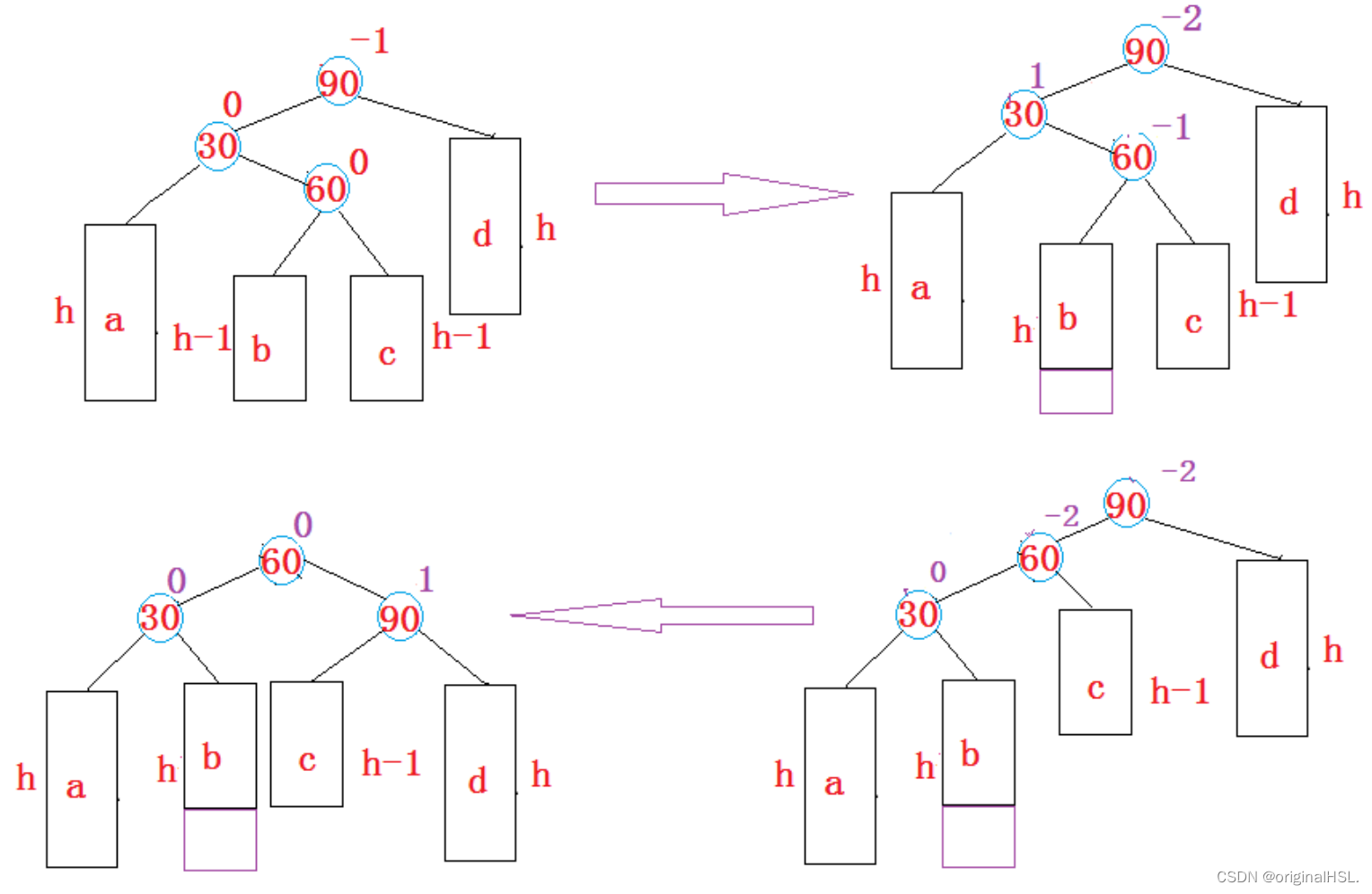
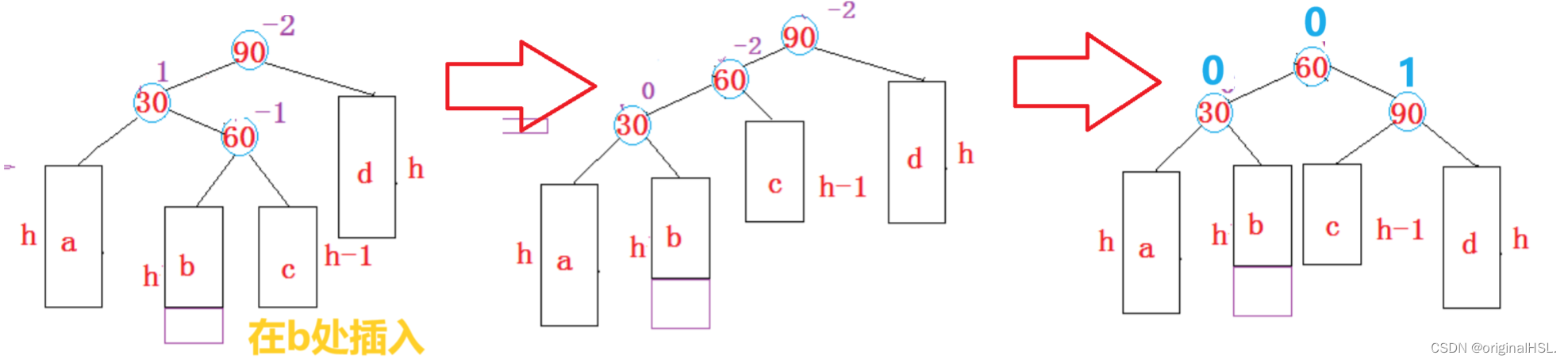
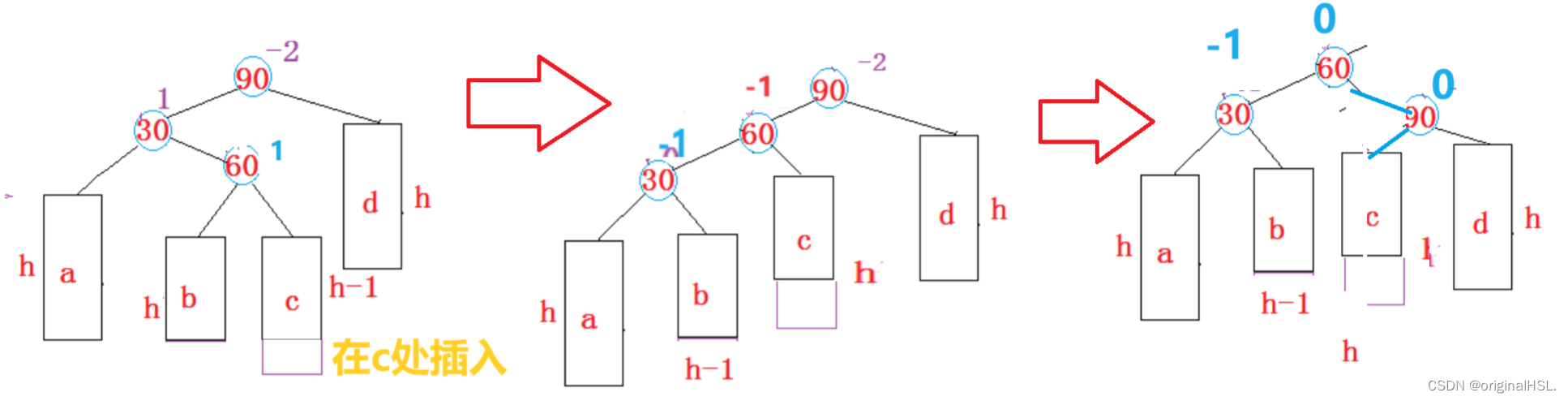
4.3 新节点插入较高右子树的左侧—右左:先右单旋再左单旋(右左双旋)
思路:
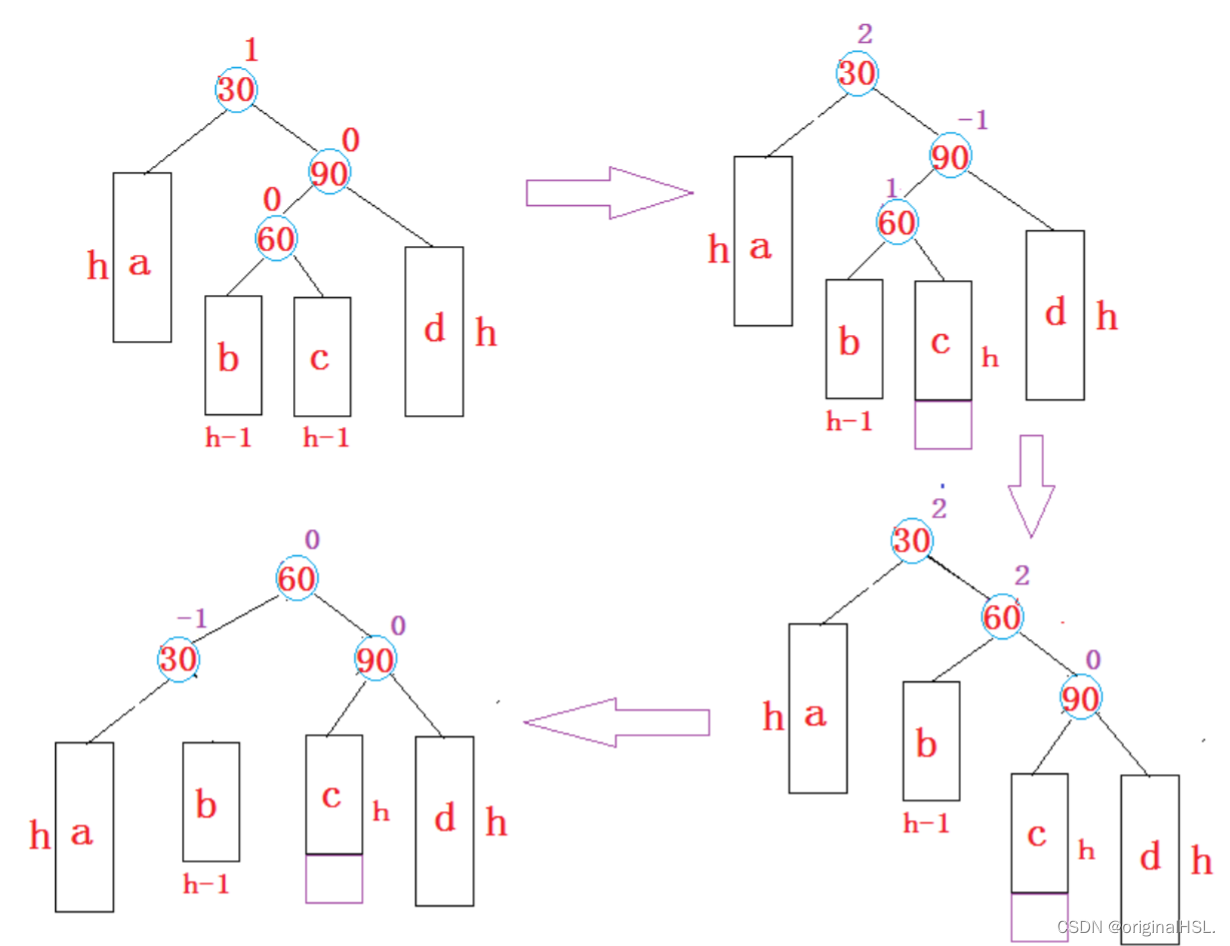
右左双旋又分两大种情况:
一. h>=1的AVL树
1.在b处插入
2.在c处插入
二. h==0的AVL树
3. 60自己就是新增
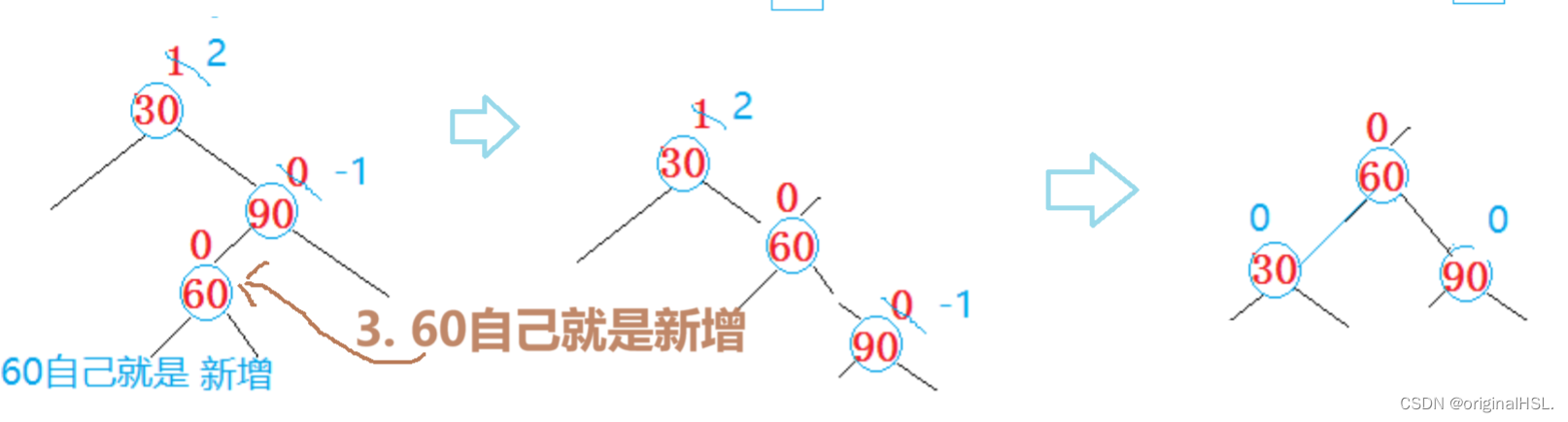
是不是很简单?

并且我们可以直接复用之前的单旋
代码思路:
- 将父节点的右孩子保存为subR,将subR的左孩子保存为subRL。
- 获取subRL的平衡因子。
- 对parent的右孩子进行右单旋操作。
- 再对parent进行左单旋操作。
- 根据subRL的平衡因子的不同情况,更新subRL、subR和parent的平衡因子。
//右左双旋
void RotateRL(Node* parent)
{Node* subR = parent->_right; // 将父节点的右孩子保存为subRNode* subRL = subR->_left; // 将subR的左孩子保存为subRLint bf = subRL->_bf; // 提前获取subRL的平衡因子RotateR(parent->_right); // 对parent的右孩子进行右单旋操作RotateL(parent); // 对parent进行左单旋操作if (bf == 0) // 如果subRL的平衡因子为0{subRL->_bf = subR->_bf = parent->_bf = 0; // 更新subRL、subR和parent的平衡因子为0}else if (bf == 1) // 如果subRL的平衡因子为1{subRL->_bf = subR->_bf = 0; // 更新subRL和subR的平衡因子为0parent->_bf = -1; // 更新parent的平衡因子为-1}else if (bf == -1) // 如果subRL的平衡因子为-1{subRL->_bf = parent->_bf = 0; // 更新subRL和parent的平衡因子为0subR->_bf = 1; // 更新subR的平衡因子为1}else{assert(false); // 如果平衡因子不是0、1或-1,则抛出错误}
}
4.4 新节点插入较高左子树的右侧—左右:先左单旋再右单旋(左右双旋)
思路:
在b处插入:
在c处插入:
60就是新增节点

代码思路:
- 将父节点的左孩子保存为subL,将subL的右孩子保存为subLR。
- 获取subLR的平衡因子。
- 对parent的左孩子进行左单旋操作。
- 再对parent进行右单旋操作。
- 根据subLR的平衡因子的不同情况,更新subLR、subL和parent的平衡因子。
//左右双旋void RotateLR(Node* parent){Node* subL = parent->_left; // 将父节点的左孩子保存为subLNode* subLR = subL->_right; // 将subL的右孩子保存为subLRint bf = subLR->_bf; // 获取subLR的平衡因子RotateL(parent->_left); //对parent的左孩子进行左单旋操作RotateR(parent); // 对parent进行右单旋操作if (bf == 0) // 如果subLR的平衡因子为0{subLR->_bf = subL->_bf = parent->_bf = 0; // 更新subLR、subL和parent的平衡因子为0}else if (bf == 1) // 如果subLR的平衡因子为1{subLR->_bf = parent->_bf = 0; // 更新subLR和parent的平衡因子为0subL->_bf = -1; // 更新subL的平衡因子为-1}else if (bf == -1) // 如果subLR的平衡因子为-1{subLR->_bf = subL->_bf = 0; // 更新subLR和subL的平衡因子为0parent->_bf = 1; // 更新parent的平衡因子为1}else{assert(false); // 如果平衡因子不是0、1或-1,则抛出错误}}
5. 整体代码:
注:加了一些简单的打印和判断平衡的代码
#pragma once
#include <iostream>
using namespace std;
#include <map>
#include <assert.h>
//struct默认权限是public
template <class K, class V>
struct AVLTreeNode
{AVLTreeNode<K,V>* _left;//左孩子节点AVLTreeNode<K,V>* _right;//右孩子节点AVLTreeNode<K,V>* _parent;//父亲节点pair<K, V> _kv; //存储键值对的pair对象,其中K表示键的类型,V表示值的类型。int _bf;//该节点的平衡因子:高度差AVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr),_kv(kv),_bf(0){}
};//class默认是private
template <class K,class V>
class AVLTree
{
typedef AVLTreeNode<K, V> Node;
public:bool insert(const pair<K,V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else{return false;}}cur = new Node(kv);if (kv.first < parent->_kv.first){parent->_left = cur;cur->_parent = parent;}if (kv.first > parent->_kv.first){parent->_right = cur;cur->_parent = parent;}/////AVL的开始while (parent){if (cur == parent->_left){parent->_bf--;} else{parent->_bf++;}//说明更新前是-1或者1,并且更新后父节点左右平衡,不用继续往上更新了if (parent->_bf == 0){break;}//说明更新前bf是0,必须往上进行更新else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}//说明更新前是-1或者1,并且更新后的子树违反了AVL树的规则,需要进行调整else if(parent->_bf == 2 || parent->_bf == -2){//旋转(核心)if (parent->_bf == 2 && cur->_bf == 1){//左单旋RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == -1){//右单旋RotateR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){//右左双旋RotateRL(parent);}else if (parent->_bf == -2 && cur->_bf == 1){//左右双旋RotateLR(parent);}//1.旋转让这棵子树平衡了//2.降低了这棵子树的高度,恢复到和之前一样的高度,对上一层没有影响,不用更新了break;}else{assert(false);}}return true;}//左单旋//(1.父亲节点的右边等于右孩子的左边; 2.右孩子的左边等于父亲节点)//【把右孩子的左边给给父亲节点的右边; 2.再把父亲节点给给右孩子的左边】void RotateL(Node *parent){Node* SubR = parent->_right;Node* SubRL = SubR->_left;//旋转链接parent->_right = SubRL;SubR->_left = parent;Node* Parent_Parent = parent->_parent;parent->_parent = SubR;if (SubRL){SubRL->_parent = parent;}//和父节点的父节点链接if (_root == parent){_root = SubR;SubR->_parent = nullptr;}else{if (Parent_Parent->_left == parent){Parent_Parent->_left = SubR;}else{Parent_Parent->_right = SubR;}SubR->_parent = Parent_Parent;}//更新平衡因子SubR->_bf = parent->_bf = 0;}//右单旋void RotateR(Node* parent){Node* SubL = parent->_left;Node* SubLR = SubL->_right;//旋转链接//动一个节点就把他的父亲也变动parent->_left = SubLR;if (SubLR)//SubLR可能为空{SubLR->_parent = parent;}Node* Parent_Parent = parent->_parent;SubL->_right = parent;parent->_parent = SubL; //和父节点的父节点链接if (_root == parent){_root = SubL;SubL->_parent = nullptr;}else{if (Parent_Parent->_left == parent){Parent_Parent->_left = SubL;}else{Parent_Parent->_right = SubL;}SubL->_parent = Parent_Parent;//链接}SubL->_bf = parent->_bf = 0;//更新平衡因子}//右左双旋void RotateRL(Node *parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){subRL->_bf = subR->_bf = parent->_bf=0;}else if (bf == 1){subRL->_bf = subR->_bf = 0;parent->_bf = -1;}else if (bf == -1){subRL->_bf = parent->_bf = 0;subR->_bf = 1;}else{assert(false);}}//左右双旋void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){subLR->_bf = subL->_bf = parent->_bf = 0;}else if (bf == 1){subLR->_bf = parent->_bf = 0;subL->_bf = -1;}else if (bf == -1){subLR->_bf = subL->_bf = 0;parent->_bf= 1;}else{assert(false);}}void InOrder(){_InOrder(_root);cout << endl;}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}//判断是否平衡bool IsBalance(){return _IsBalance(_root);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}bool _IsBalance(Node* root){if (root == nullptr)return true;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);if (rightHeight - leftHeight != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(rightHeight - leftHeight) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);}
private:Node* _root = nullptr;
};
6. AVL树的验证
AVL树是在二叉搜索树的基础上加入了平衡性的限制,因此要验证AVL树,可以分两步:
1.验证其为二叉搜索树
- 如果中序遍历可得到一个有序的序列,就说明为二叉搜索树
#include "AVLTree.h"
#include <vector>
int main()
{int arr[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };AVLTree<int, int> a;for (auto e : arr){a.insert(make_pair(e, e));}a.InOrder();return 0;
}
2.验证其为平衡树
- 每个节点子树高度差的绝对值不超过1(注意节点中如果没有平衡因子)
- 节点的平衡因子是否计算正确
用下面代码判断是否为平衡树:
bool IsBalance()
{return _IsBalance(_root); // 调用内部函数_IsBalance检查整个AVL树是否平衡
}int _Height(Node* root)
{if (root == nullptr) // 如果当前节点为空,表示到达叶子节点,返回高度0return 0;int leftHeight = _Height(root->_left); // 递归计算左子树的高度int rightHeight = _Height(root->_right); // 递归计算右子树的高度return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1; // 返回较大的子树高度加1,表示当前子树的高度
}bool _IsBalance(Node* root)
{if (root == nullptr) // 如果当前节点为空,表示到达叶子节点,返回true表示平衡return true;int leftHeight = _Height(root->_left); // 计算左子树的高度int rightHeight = _Height(root->_right); // 计算右子树的高度if (rightHeight - leftHeight != root->_bf) // 判断右子树高度减去左子树高度是否等于当前节点的平衡因子{cout << root->_kv.first << "平衡因子异常" << endl; // 如果不相等,输出异常信息return false; // 返回false表示不平衡}return abs(rightHeight - leftHeight) < 2 // 判断当前子树的高度差是否小于2&& _IsBalance(root->_left) // 递归检查左子树是否平衡&& _IsBalance(root->_right); // 递归检查右子树是否平衡
}
代码解释:
- _Height函数用于计算以给定节点为根的子树的高度,它递归地计算左子树和右子树的高度,然后返回较大的一侧高度加1,表示当前子树的高度。
- _IsBalance函数是实际进行平衡性检查的函数,它首先判断当前节点是否为空,如果为空则表示到达叶子节点,返回true表示平衡。然后,它计算当前节点的左子树和右子树的高度,并判断其高度差是否等于当前节点的平衡因子。如果不相等,则输出异常信息并返回false表示不平衡。接着,它递归地检查左子树和右子树是否平衡,并判断当前子树的高度差是否小于2。如果所有条件都满足,则返回true表示平衡。
- 通过调用IsBalance函数,可以判断整个AVL树是否平衡,即是否满足平衡因子的定义和高度差的限制。
代码测试:
int main()
{const int N = 30;vector<int> v;v.reserve(N);srand(time(0));for (size_t i = 0; i < N; i++){v.push_back(rand() % 100 + 1);}AVLTree<int, int> t;for (auto e : v){t.insert(make_pair(e, e));}t.InOrder();//中序打印if (t.IsBalance()){cout << "是平衡二叉树" << endl;}else{cout << "不是平衡二叉树" << endl;}return 0;
}
7. AVL树的性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即 l o g 2 ( N ) log_2 (N) log2(N)。但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。
(本章完)