Image Recognition for Fruit-Picking Robots
水果采摘机器人的图像识别功能
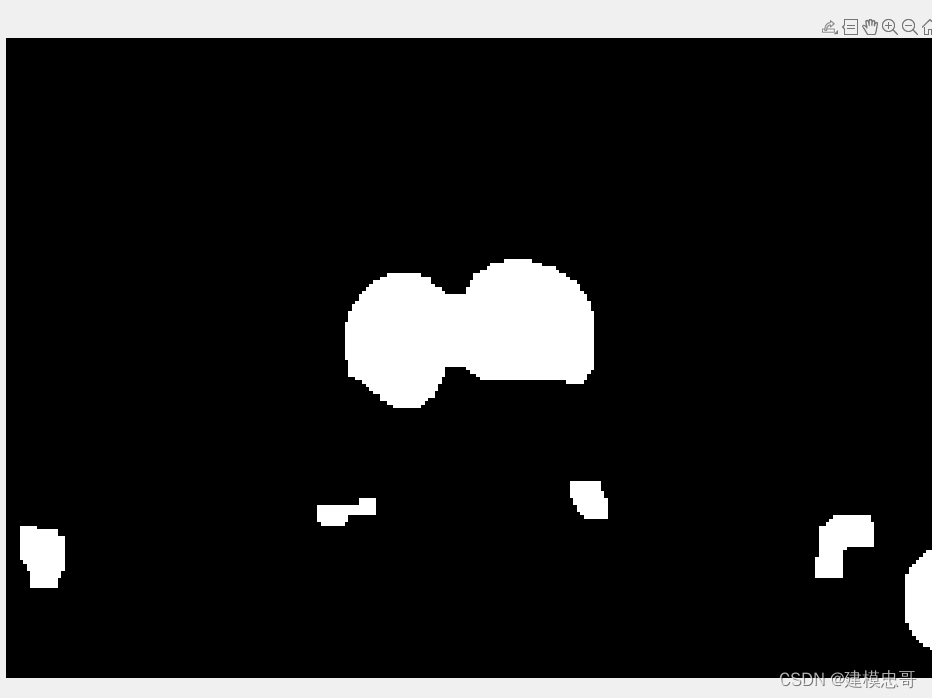
问题 1:计数苹果
根据附件 1 中提供的可收获苹果的图像数据集,提取图像特征,建立数学模型,计算每幅图像中的苹果数量,并绘制附件 1 中所有苹果分布的直方图。


问题 2:估计苹果的位置
根据附录 1 中提供的可收获苹果的图像数据集,在每幅图像中确定苹果的
以图像左下角为坐标原点,确定每幅图像中苹果的位置。
并绘制附件 1 中所有苹果几何坐标的二维散点图。
并画出附件 1 中所有苹果几何坐标的二维散点图。

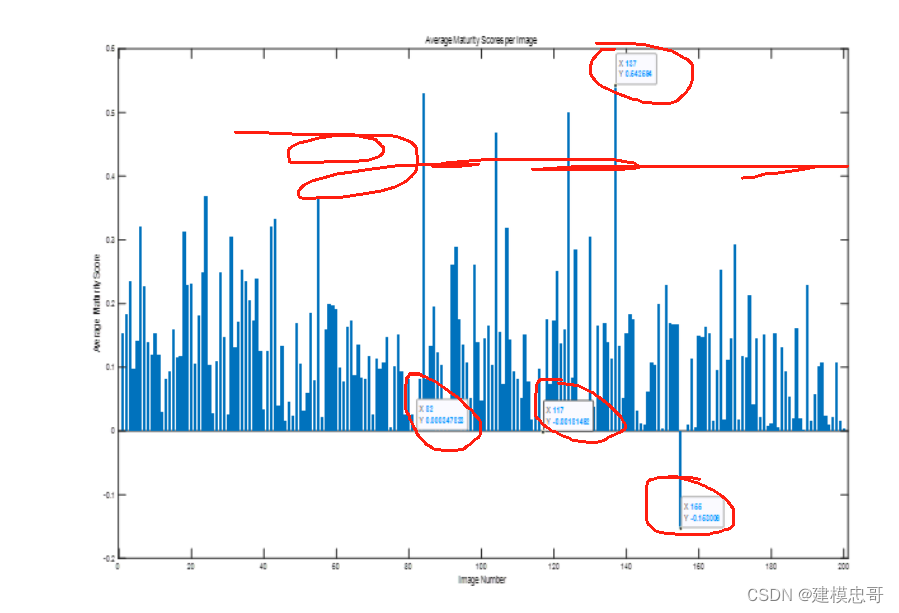
问题 3:估计苹果的成熟度
根据附录 1 中提供的可收获苹果的图像数据集,建立一个建立数学模型,计算每幅图像中苹果的成熟度,并绘制所有苹果的成熟度分布直方图。
附件 1 中所有苹果的成熟度分布。
分别为:82/117/137/155张图成熟度验证。

问题 4:估算苹果的质量
根据附录 1 中提供的可收获苹果的图像数据集,计算每幅图像中苹果的二维面积,图像左下角为 坐标原点,计算每幅图像中苹果的二维面积,估算苹果的质量,并绘制附件 1 中所有苹果质量分布的直方图。并绘制附件 1 中所有苹果的质量分布直方图。
问题 5:苹果的识别
根据附录 2 中提供的收获水果图像数据集,提取图像特征,训练苹果识别模型,并绘制苹果质量分布直方图特征,训练苹果识别模型,识别附录 3 中的苹果,并绘制苹果 ID 编号的分布直方图。并绘制附件 3 中所有苹果图像 ID 编号的分布直方图。
yolo算法正在ing