图的介绍
如果你有学过《离散数学》,那么对图的概念一定不陌生,在计算机科学中,一个图就是一些顶点的集合,这些顶点通过一系列边连接(结对)。顶点用圆圈表示,边就是这些圆圈之间的连线。注意:顶点也称为节点或交点,边也称为链接。
同时边可以是双向的,也可以是单向的,不一定所有的顶点中间一定要有边,如图:

大家都或多或少听说过最短路径算法,那你知道生活中有哪些场景出现过它的应用吗?没错,就是平常使用的地图导航软件,如图:

在上图中起点、终点、每一个交叉路口都可以看作是一个顶点,而连接它们的绿色通道就是边。
另外可以从图上看出,从一个地方到另一个地方有着多种路径,影响因素有距离、红绿灯、拥堵情况、事故。对于多种因素可以使用边的权重来表示,根据情况的不同给边分配数值。
我们之前学的树和链表其实都是图的特例。
图的表示方法
邻接列表
每一个顶点都会保存着与它相邻的边,并且这个边的起点是这个顶点,即只描述指向外部的边。例如下图中,B应该保存着三条边,C保存一条边,因为B有三条指向外面,而C只有一条指向外面。
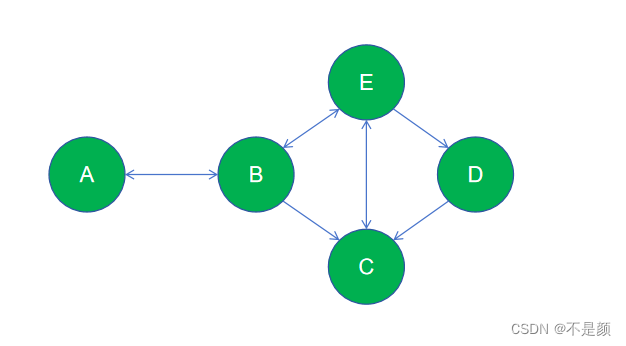
而它的邻接列表表示为:

按照这样的存储方式,想必查找两个顶点之间关系或者权重时会有点费时。
邻接矩阵
邻接矩阵由二维数组表示,行和列都表示顶点,两个顶点所对应的矩阵元素数值表示两个顶点是否相连( 0 表示不相连,非 0 表示相连以及权重值)。
将上面的图用邻接矩阵表式则为(在这里边上无权重,所有1表示的是相连):
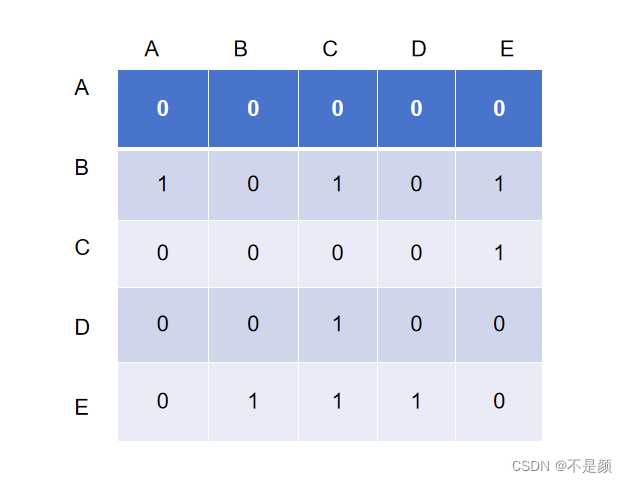
这邻接矩阵查找就特别快了,但是往里面添加顶点的成本很高,因为要重新按照新的行和列创建一个新的矩阵,然后将已有的数据复制到新矩阵中去。
使用哪个更好
| 操作 | 邻接列表 | 邻接矩阵 |
|---|---|---|
| 存储空间 | O(V+E) | O(V^2) |
| 添加顶点 | O(1) | O(V^2) |
| 添加边 | O(1) | O(1) |
| 检查相邻性 | O(1) | O(1) |
其中V表示图中顶点的个数,E表示边的个数。
结论:大多数情况选择邻接列表。除非图比较密集,即每个顶点都与大部分顶点相邻,并且个数不多,那么就选择邻接矩阵。
图的算法实现
结构体定义
首先要理清楚结构关系,这里的图中有三种结构,分别是边、顶点、邻接链表,以下是它们的定义。
#define MaxSize 1024typedef char DateElem; //顶点中存储的元素
//边
typedef struct _EdgeNode
{int adjvex; //与之相邻的节点的位置int weight; //边的权重struct _EdgeNode* next; //指向下一条与这个顶点相邻的边
}EdgeNode;//顶点
typedef struct _VertexNode
{DateElem date; //顶点的数据struct _EdgeNode* first; //指向第一条与之相邻的边
}VertexNode,AdjList;//邻接链表
typedef struct _AdjListGraph
{AdjList* adjlist; //数组,保存着所有的顶点int vex; //顶点数int edge;//边数
}AdjListGraph;邻接链表结构体中有着一个数组,数组保存着各顶点,顶点中又保存着与之相邻的边,整体是这样的结构。
图的初始化
其中 visited 数组是为了接下来的遍历操作,防止重复访问节点,因为在初始化里面出现了,那就一起写上。
bool visited[MaxSize]; //节点是否被访问过,被访问过为true
void Init(AdjListGraph& G)
{G.adjlist = new AdjList[MaxSize]; //像哈希表的结构G.edge = 0;G.vex = 0;for (int i = 0; i < MaxSize; i++){visited[i] = false;}
}图的创建
因为创建一条边,需要知道起始的顶点和结束的顶点的位置,所以使用自己定义的 Location 函数,通过你输入的顶点数据,找到这个顶点在数组中的位置。
int Location(AdjListGraph& G, DateElem c);void Create(AdjListGraph& G)
{cout << "请输入顶点和边的个数:";cin >> G.vex >> G.edge;cout << "请依次输入顶点的数据:";for (int i = 0; i < G.vex; i++){cin >> G.adjlist[i].date;G.adjlist[i].first = NULL;}cout << "请依次输入边的起始和终点:";DateElem v1, v2;int i1 = 0 , i2 = 0;for (int i = 0; i < G.edge; i++){cin >> v1 >> v2;i1 = Location(G, v1);i2 = Location(G, v2);if (i1 != -1 && i2 != -1){EdgeNode* tmp = new EdgeNode;tmp->adjvex = i2;tmp->next = G.adjlist[i1].first;G.adjlist[i1].first = tmp;}}
}//通过顶点保存的数据找到顶点在图中的位置
int Location(AdjListGraph& G, DateElem c)
{for (int i = 0; i < G.vex; i++){if (G.adjlist[i].date == c){return i;}}return -1; //没找到
}其中插入节点的操作为下图所示:

相当于链表的前插法。
图的遍历
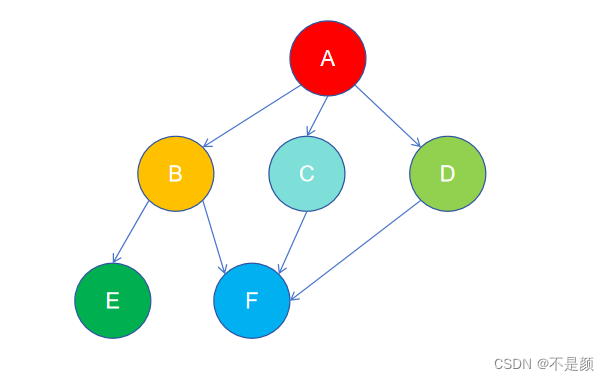
如下图,这也是一个图结构,不过这让我想到树结构,是因为图的遍历方式和树的遍历方式有很多相似之处。
深度遍历
也就是以一个未被访问过的顶点作为起始顶点,沿当前顶点的边去访问未被访问过的顶点。
当没有未被访问过的顶点时,就回退到上一个顶点,访问别的顶点,直到所有的顶点都被访问过。
深度遍历其实迷宫问题中就出现过了,也就是这条路能走就一直走,不撞南墙不回头。
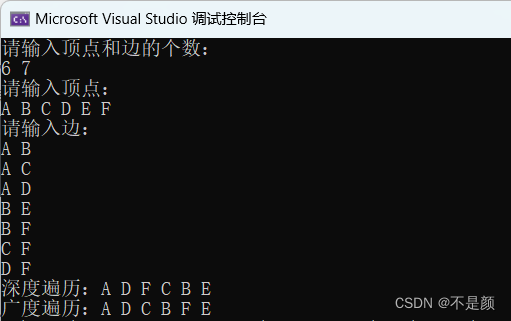
深度遍历和树的前序遍历很类似,假如起始顶点是 A,深度遍历可以是:A D F C B E,也可以是A B E F C D,只是因为输入边时的顺序不同。
//深度遍历一个节点
void DFS(AdjListGraph& G, int v)
{if (visited[v] == true){return;}cout << G.adjlist[v].date << " ";visited[v] = true;EdgeNode* temp = G.adjlist[v].first;int cur = 0;while (temp != NULL){cur = temp->adjvex; //当前节点的位置if (visited[cur] == false){DFS(G, cur);}temp = temp->next;}}
//深度遍历全部节点
void DFS_All(AdjListGraph& G)
{for (int i = 0; i < MaxSize; i++){visited[i] = false;}for (int i = 0; i < G.vex; i++){if (visited[i] == false){DFS(G, i);}}
}广度遍历
首先以一个未被访问过的顶点作为起始顶点,访问其相邻的所有顶点。
然后对每个相邻的顶点,再访问它们相邻的未被访问过的顶点,直至所有顶点都被访问过,遍历结束。
广度遍历有点像树的层序遍历,例如 A 为起始顶点,那么广度遍历的结果可能是:A D C B F E 或者是:A B C D E F 。
//广度优先遍历 需要包含头文件 <queue>
void BFS(AdjListGraph& G, int v)
{queue<int> q;q.push(v);int cur = -1;while (!q.empty()){cur = q.front(); //取队头元素q.pop(); //出队if (visited[cur] == false){cout << G.adjlist[cur].date << " ";visited[cur] = true;}//将与 cur 顶点相邻的顶点都入队EdgeNode* tmp = G.adjlist[cur].first; while (tmp != NULL){q.push(tmp->adjvex);tmp = tmp->next;}}
}
void BFS_All(AdjListGraph& G)
{for (int i = 0; i < MaxSize; i++) //初始化{visited[i] = false;}for (int i = 0; i < G.vex; i++){if (visited[i] == false){BFS(G, i);}}
}
用上图的图作为演示,得到运行结果。
其实从它们的叫法中也能看出一些来。
全部代码
#include <iostream>
#include <queue>
using namespace std;#define MaxSize 1024
typedef char DateElem;
//边
typedef struct _EdgeNode
{int adjvex; //与之相邻的节点int weight; //边的权重struct _EdgeNode* next; //指向下一条与这个顶点相邻的边
}EdgeNode;//顶点
typedef struct _VertexNode
{DateElem date; //顶点的数据struct _EdgeNode* first;//指向第一条与之相邻的边
}VertexNode,AdjList;//邻接链表
typedef struct _AdjListGraph
{AdjList* adjlist; //数组,保存着所有的顶点int vex; //顶点数int edge;//边数
}AdjListGraph;bool visited[MaxSize]; //节点是否被访问过,被访问过为true
//图的初始化
void Init(AdjListGraph& G)
{G.adjlist = new AdjList[MaxSize]; //像哈希表G.edge = 0;G.vex = 0;for (int i = 0; i < MaxSize; i++){visited[i] = false;}
}int Location(AdjListGraph& G, DateElem c);
//图的创建
void Create(AdjListGraph& G)
{cout << "请输入顶点和边的个数:"<<endl;cin >> G.vex >> G.edge;cout << "请输入顶点:" << endl;for (int i = 0; i < G.vex; i++){cin >> G.adjlist[i].date;G.adjlist[i].first = NULL;}cout << "请输入边:" << endl;DateElem v1, v2;int i1 = 0 , i2 = 0;for (int i = 0; i < G.edge; i++){cin >> v1 >> v2;i1 = Location(G, v1);i2 = Location(G, v2);if (i1 != -1 && i2 != -1){EdgeNode* tmp = new EdgeNode;tmp->adjvex = i2;tmp->next = G.adjlist[i1].first;G.adjlist[i1].first = tmp;}}
}//通过顶点保存的数据找到顶点在图中的位置
int Location(AdjListGraph& G, DateElem c)
{for (int i = 0; i < G.vex; i++){if (G.adjlist[i].date == c){return i;}}return -1; //没找到
}//图的遍历,深度和广度//深度遍历一个节点
void DFS(AdjListGraph& G, int v)
{if (visited[v] == true){return;}cout << G.adjlist[v].date << " ";visited[v] = true;EdgeNode* temp = G.adjlist[v].first;int cur = 0;while (temp != NULL){cur = temp->adjvex; //当前节点的位置if (visited[cur] == false){DFS(G, cur);}temp = temp->next;}}
//深度遍历全部节点
void DFS_All(AdjListGraph& G)
{for (int i = 0; i < MaxSize; i++){visited[i] = false;}for (int i = 0; i < G.vex; i++){if (visited[i] == false){DFS(G, i);}}
}//广度优先遍历 包含头文件 <queue>
void BFS(AdjListGraph& G, int v)
{queue<int> q;q.push(v);int cur = -1;while (!q.empty()){cur = q.front(); //取队头元素q.pop();if (visited[cur] == false){cout << G.adjlist[cur].date << " ";visited[cur] = true;}EdgeNode* tmp = G.adjlist[cur].first; while (tmp != NULL){q.push(tmp->adjvex);tmp = tmp->next;}}
}
void BFS_All(AdjListGraph& G)
{for (int i = 0; i < MaxSize; i++){visited[i] = false;}for (int i = 0; i < G.vex; i++){if (visited[i] == false){BFS(G, i);}}
}int main(void)
{AdjListGraph G;//图的初始化Init(G);//图的创建Create(G);//图的遍历:深度遍历cout << "深度遍历:";DFS_All(G);cout << endl;//图的遍历:广度遍历cout << "广度遍历:";BFS_All(G);return 0;
}