目录
1 文档... 2
1.1.1 变更历史... 2
1.1.2 Term.. 2
1.1.3 引用文档... 2
2 MCU软件框架图... 3
3 模块介绍... 3
| 版本Version | 状态 Status | 内容 Contents | 日期 Date | 撰写 Editor | 批准 Approver |
| V0.1 | |||||
-
-
- Term
-
| 编号 No. | 术语和缩写 Terms & Abbreviation | 解释 Explanation |
-
-
- 引用文档
-
| 编号 No. | 文档名称 Document Name | 文档版本 Document Version | 文档日期 Document Date |
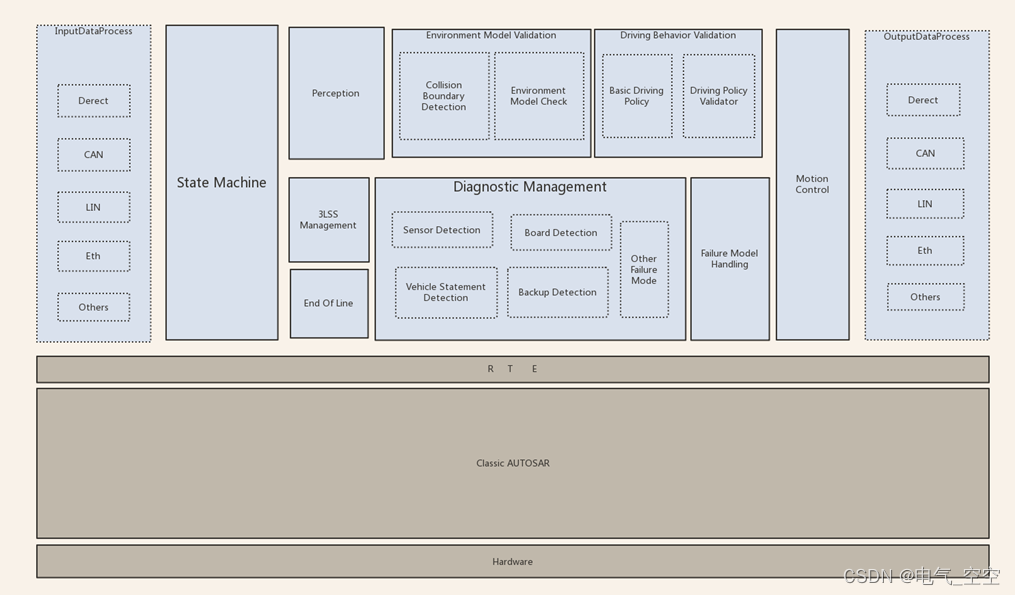
- MCU软件框架图
- 模块介绍
- Environment Model Validation
环境建模校验模块,分为 Collision Boundary Detection和Environment Model Validation两个子功能,Collision Boundary Detection以车身为中心的描绘出可能碰撞边界, Environment Model Validation将碰撞边界和完整环境模型做比对,如果完整环境模型中所 有障碍物都在碰撞边界之外,那么表示环境模型是正确的,通过校验,否则抛出异常到 Failure Mode Handling 模块;
-
- Perception
- 感知模块,由于ASIL分解独立性需求,感知不能直接使用Performence SOC结果,此模块包含毫米波雷达感知,超声波雷达感知,输出障碍物坐标,障碍物强度,障碍物尺寸等信息;

![[JVM] 5. 运行时数据区(2)-- 程序计数器(Program Counter Register)](https://img-blog.csdnimg.cn/img_convert/b78d59aa6414cac49c11b50f86666f8f.png#pic_center)