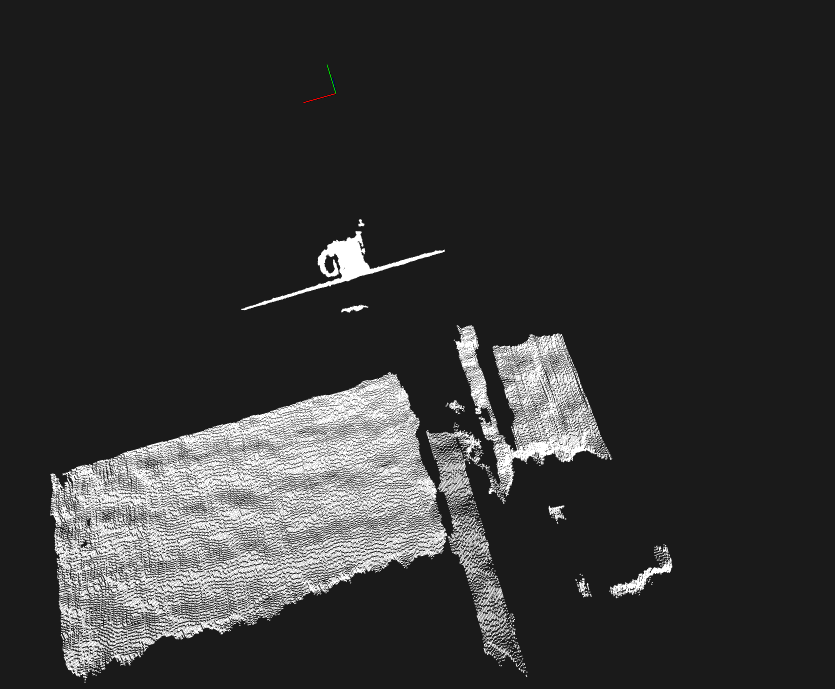
 原始点云
原始点云
 直通滤波,z轴0~1.1
直通滤波,z轴0~1.1
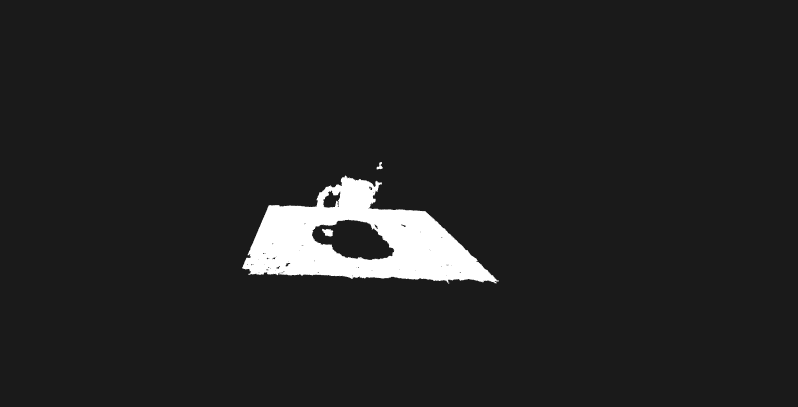
 分割模型为平面,分割结果进行投影
分割模型为平面,分割结果进行投影
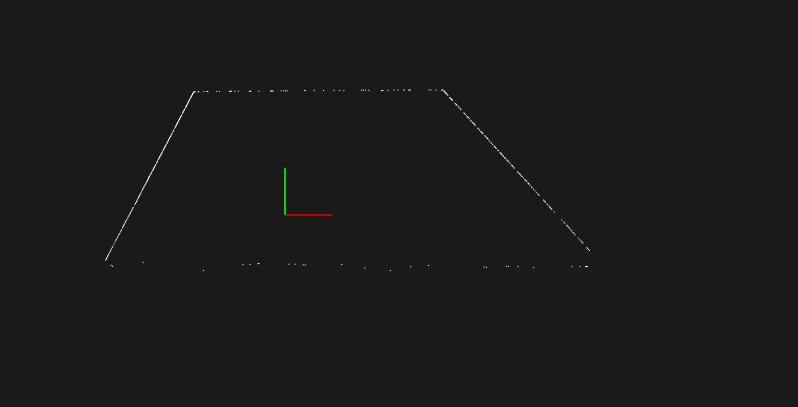 提取多边形
提取多边形
代码:
#include <pcl/ModelCoefficients.h> // 模型系数的数据结构,如平面、圆的系数
#include <pcl/io/pcd_io.h>#include <pcl/point_types.h> // 点云数据类型
#include <pcl/sample_consensus/method_types.h> // 采样一致性方法(Sample Consensus Methods)的枚举类型,如RANSAC(随机采样一致性)
#include <pcl/sample_consensus/model_types.h> // 采样一致性模型(Sample Consensus Models)的枚举类型,例如平面、圆#include <pcl/filters/passthrough.h> // 直通滤波器,指定范围筛选
#include <pcl/filters/project_inliers.h> // 点云数据投影到指定模型(如平面),可用于提取点云数据的特定部分#include <pcl/segmentation/sac_segmentation.h> // 基于采样一致性的分割,将点云数据分割为不同的部分,如平面、圆柱
#include <pcl/surface/concave_hull.h> // 生成点云数据凹多边形(concave Hull)表示的方法,可用于提取点云数据的边界信息
#include <pcl/visualization/cloud_viewer.h>int main(){pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>),cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>),cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);// 读取点云数据pcl::PCDReader reader;reader.read("/home/jason/file/pcl-learning/11surface表面/2在平面模型上提取凸(凹)多边形/table_scene_mug_stereo_textured.pcd", *cloud);// 建立过滤器对z轴进行过滤pcl::PassThrough<pcl::PointXYZ> pass;pass.setInputCloud(cloud);pass.setFilterFieldName("z");pass.setFilterLimits(0, 1.1);pass.filter(*cloud_filtered);std::cerr << "PointCloud after filtering has: "<< cloud_filtered->points.size() << " data points." << std::endl;// 分割点云数据pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients); // 用于存储模型系数pcl::PointIndices::Ptr inliers(new pcl::PointIndices); // 用于存储分割后的点云索引,这里将属于平面的点云索引pcl::SACSegmentation<pcl::PointXYZ> seg; // 创建分割对象seg.setOptimizeCoefficients(true); // 设置优化系数seg.setModelType(pcl::SACMODEL_PLANE);// 设置模型类型为平面seg.setMethodType(pcl::SAC_RANSAC); // 设置采用RANSAC算法进行分割seg.setDistanceThreshold(0.01); // 设置点到平面的最大距离阈值seg.setInputCloud(cloud_filtered); // 设置输入点云seg.segment(*inliers, *coefficients); // 执行点云分割std::cerr << "PointCloud after segmentation has: "<< inliers->indices.size() << "inliers." << std::endl;// 对点云投影pcl::ProjectInliers<pcl::PointXYZ> proj; // 创建投影对象滤波器对象proj.setModelType(pcl::SACMODEL_PLANE); // 设置模型类型为平面proj.setIndices(inliers); // 设置输入点云的索引proj.setInputCloud(cloud_filtered); // 设置输入点云proj.setModelCoefficients(coefficients); // 平面模型的系数设置到投影滤波器中proj.filter(*cloud_projected); // 进行投影滤波std::cerr << "PointCloud after projection has: "<< cloud_projected->points.size() << " data points. " << std::endl;// 存储提取多边形上的点云pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_hull(new pcl::PointCloud<pcl::PointXYZ>);pcl::ConcaveHull<pcl::PointXYZ> chull; // 创建多边形提取对象chull.setInputCloud(cloud_projected); // 设置输入点云为chull.setAlpha(0.1);chull.reconstruct(*cloud_hull);std::cerr << "Concave hull has: " << cloud_hull->points.size()<< " data points." << std::endl;pcl::PCDWriter writer;writer.write("/home/jason/file/pcl-learning/11surface表面/2在平面模型上提取凸(凹)多边形/table_scene_mug_stereo_textured_hull.pcd",*cloud_hull, false);pcl::visualization::CloudViewer viewer("cloud viewer");viewer.showCloud(cloud); // 每次只能展示一个
// viewer.showCloud(cloud_filtered);
// viewer.showCloud(cloud_hull);while (!viewer.wasStopped() ) {}return 0;
}