今天我们分享MobileNet V2实现遥感影像土地利用的图像分类。
数据集
本次使用的数据集是UC Merced Land-Use Dataset。UC Merced Land-Use Dataset 是一个用于研究的 21 级土地利用图像遥感数据集,均提取自 USGS National Map Urban Area Imagery(美国地质调查局国家地图城市地区图像) 系列,其被用于全国各地的城市地区。此数据集公共领域图像的像素分辨率为 1 英尺(0.3 米),图像像素大小为 256*256,包含 21 个类别的场景图像共计 2100 张,其中每个类别有 100 张。这 21 个类别分别是:农业、飞机、棒球场、海滩、建筑物、树丛、密集住宅、森林、高速公路、高尔夫球场、港口、路口、中型住宅、移动家庭公园、立交桥、停车场、河、跑道、稀疏住宅、储油罐。 

数据集划分
首先我们可以对数据集进行划分,按训练集、验证集、测试集比例7:1.5:1.5进行划分。
import os
import shutil
import random
# 设置数据集根目录
data_root = './datasets/UCMerced_LandUse/Images' # 替换成你的数据集根目录
# 设置训练集、验证集、测试集的目录
train_dir = './datasets/train'
val_dir = './datasets/val'
test_dir = './datasets/test'
# 创建目录
os.makedirs(train_dir, exist_ok=True)
os.makedirs(val_dir, exist_ok=True)
os.makedirs(test_dir, exist_ok=True)
# 获取所有子文件夹列表
class_folders = sorted(os.listdir(data_root))
# 定义训练集、验证集、测试集比例
train_ratio = 0.7
val_ratio = 0.15
test_ratio = 0.15
for class_folder in class_folders:
class_path = os.path.join(data_root, class_folder)
images = os.listdir(class_path)
random.shuffle(images) # 随机打乱顺序
num_images = len(images)
num_train = int(num_images * train_ratio)
num_val = int(num_images * val_ratio)
train_images = images[:num_train]
val_images = images[num_train:num_train + num_val]
test_images = images[num_train + num_val:]
# 移动图像到对应目录
for img in train_images:
src = os.path.join(class_path, img)
dest = os.path.join(train_dir, class_folder, img)
os.makedirs(os.path.dirname(dest), exist_ok=True)
shutil.copy(src, dest)
for img in val_images:
src = os.path.join(class_path, img)
dest = os.path.join(val_dir, class_folder, img)
os.makedirs(os.path.dirname(dest), exist_ok=True)
shutil.copy(src, dest)
for img in test_images:
src = os.path.join(class_path, img)
dest = os.path.join(test_dir, class_folder, img)
os.makedirs(os.path.dirname(dest), exist_ok=True)
shutil.copy(src, dest)
划分完毕后,数据集分别保存在train、val、test三个文件夹内。每个文件夹内有21个子文件夹分别对应21类。
MobileNet V2
MobileNet-v2的主要思想就是在v1的基础上引入了线性瓶颈 (Linear Bottleneck)和逆残差 (Inverted Residual)来提高网络的表征能力,同样也是一种轻量级的卷积神经网络。 

import torch.nn as nn
import numpy as np
import math
def conv3x3(input_channel, output_channel, stride):
return nn.Sequential(
nn.Conv2d(input_channel, output_channel, 3, stride, 1, bias=False),
nn.BatchNorm2d(output_channel),
nn.ReLU6(inplace=True)
)
def conv1x1(input_channel, output_channel):
return nn.Sequential(
nn.Conv2d(input_channel, output_channel, 1, 1, 0, bias=False),
nn.BatchNorm2d(output_channel),
nn.ReLU6(inplace=True)
)
def make_divisible(x, divisible_by=8):
return int(np.ceil(x * 1. / divisible_by) * divisible_by)
class InvertedResidual(nn.Module):
def __init__(self, input_channel, out_channel, stride, expand_ratio):
super().__init__()
assert stride in [1, 2], 'Stride value is greater than 2'
hidden_dimension = round(input_channel * expand_ratio)
self.identity = stride == 1 and input_channel == out_channel
if expand_ratio == 1:
self.conv = nn.Sequential(
#depthwise convolution
nn.Conv2d(hidden_dimension, hidden_dimension, 3, stride, 1, groups=hidden_dimension, bias=False),
nn.BatchNorm2d(hidden_dimension),
nn.ReLU6(inplace=True),
#pointwise linear
nn.Conv2d(hidden_dimension, out_channel, 1, 1, 0, bias=False),
nn.BatchNorm2d(out_channel)
)
else:
self.conv = nn.Sequential(
# pointwise conv
nn.Conv2d(input_channel, hidden_dimension, 1, 1, 0, bias=False),
nn.BatchNorm2d(hidden_dimension),
nn.ReLU6(inplace=True),
# depthwise conv
nn.Conv2d(hidden_dimension, hidden_dimension, 3, stride, 1, groups=hidden_dimension, bias=False),
nn.BatchNorm2d(hidden_dimension),
nn.ReLU6(inplace=True),
# pointwise-linear
nn.Conv2d(hidden_dimension, out_channel, 1, 1, 0, bias=False),
nn.BatchNorm2d(out_channel),
)
def forward(self, x):
if self.identity:
return x + self.conv(x)
else:
return self.conv(x)
class MobileNetV2(nn.Module):
def __init__(self, input_channel, n_classes=10, width_multipler=1.0):
super(MobileNetV2, self).__init__()
block = InvertedResidual
first_channel = 32
last_channel = 1280
# setting of inverted residual blocks
self.cfgs = [
# t, c, n, s
[1, 16, 1, 1],
[6, 24, 2, 2],
[6, 32, 3, 2],
[6, 64, 4, 2],
[6, 96, 3, 1],
[6, 160, 3, 2],
[6, 320, 1, 1],
]
self.last_channel = make_divisible(last_channel * width_multipler) if width_multipler > 1.0 else last_channel
self.features = [conv3x3(input_channel, first_channel, 2)]
for t, c, n, s in self.cfgs:
output_channel = make_divisible(c * width_multipler) if t > 1 else c
for i in range(n):
if i == 0:
self.features.append(block(first_channel, output_channel, s, expand_ratio=t))
else:
self.features.append(block(first_channel, output_channel, 1, expand_ratio=t))
first_channel = output_channel
# building last several layers
self.features.append(conv1x1(first_channel, self.last_channel))
# make it nn.Sequential
self.features = nn.Sequential(*self.features)
# building classifier
self.classifier = nn.Linear(self.last_channel, n_classes)
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = x.mean(3).mean(2)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
if m.bias is not None:
m.bias.data.zero_()
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
m.weight.data.normal_(0, 0.01)
m.bias.data.zero_()
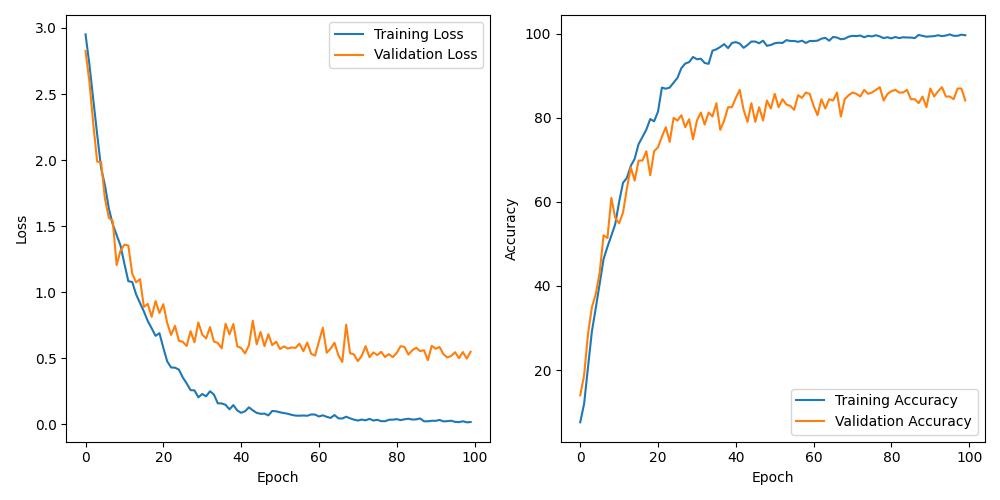
训练过程
精度与测试
「精度」
import torch
import torchvision.transforms as transforms
from torchvision import datasets
# 定义测试集目录
test_dir = './datasets/test'
# 加载测试集数据
transform = transforms.Compose([
transforms.Resize((256, 256)), # 图像调整为模型输入大小
transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,))
])
test_data = datasets.ImageFolder(root=test_dir, transform=transform)
test_loader = torch.utils.data.DataLoader(test_data, batch_size=32, shuffle=False)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 加载模型
model = torch.load('full_model.pth')
model.eval()
# 对测试集进行验证
correct = 0
total = 0
with torch.no_grad():
for images, labels in test_loader:
images, labels = images.to(device), labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
accuracy = 100*correct / total
print(f"Accuracy on test set: {accuracy}")
 「测试」 这里我们从测试集中选取一张森林影像
「测试」 这里我们从测试集中选取一张森林影像
from PIL import Image
import torch
import torchvision.transforms as transforms
import torch.nn.functional as F
class_name=['agricultural','airplane','baseballdiamond','beach','buildings','chaparral','denseresidential','forest'
,'freeway','golfcourse','harbor','intersection','mediumresidential','mobilehomepark','overpass','parkinglot','river','runway','sparseresidential','storagetanks','tenniscourt']
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 加载模型
model = torch.load('full_model.pth')
model.eval()
# 加载测试集数据
transform = transforms.Compose([
transforms.Resize((256, 256)), # 图像调整为模型输入大小
transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,))
])
# 加载单张图片
single_image_path = './datasets/test/forest/forest06.tif'
single_image = Image.open(single_image_path)
single_image = transform(single_image).unsqueeze(0) # 对图片进行预处理和批处理
# 使用模型进行预测
with torch.no_grad():
single_image = single_image.to(device)
output = model(single_image)
probabilities = F.softmax(output, dim=1)
_, predicted_class = torch.max(output, 1)
print(f"Predicted class: {class_name[predicted_class.item()]}") # 输出预测的类别
总结
感兴趣的可以按文末方式,免费获取数据集、完整代码与训练结果。
获取方法
如有需要,请关注微信公众号「DataAssassin」后,后台回复「024」领取。
更多pytorch与tensorflow2网络结构见下图。加入星球可免费获取下列所有网络结构。 「tensorflow2」  「pytorch」
「pytorch」 
 加入前不要忘了领取优惠券哦!
加入前不要忘了领取优惠券哦! 
本文由 mdnice 多平台发布