文章目录
- 概述
- 开发板中设备树文件目录结构
- 设备树文件语法
- 设备树文件参考实例:
- Devicetree 格式
- DTS 文件的格式
- node 的格式
- properties 的格式
- dts 文件包含 dtsi 文件
- 常用的属性
- #address-cells 、#size-cells
- compatible
- model
- status
- reg
- interrupt
- gpio属性
- name( 过时了,建议不用)
- device_type(过时了,建议不用)
- 常用的节点(node)
- 根节点
- CPU 节点
- memory 节点
- chosen 节点
- 编译、更换设备树
- 自动编译
- 手动编译
- 内核对设备树的处理
- dtb 中每一个节点都被转换为 device_node 结构体
- 哪些设备树节点会被转换为 platform_device
- 怎么转换为 platform_device
- ==platform_device 如何与 platform_driver 配对==
- platform_bus-type总线匹配规则
- 获取设备资源
- 生成的platform_device节点
- of_find_device_by_node
- platform_get_resource
- 不会生成platform_device节点
- 找到节点
- of_find_node_by_path
- of_find_node_by_name
- of_find_node_by_type
- of_find_compatible_node
- of_find_node_by_phandle
- of_get_parent
- of_get_next_parent
- of_get_next_child
- of_get_next_available_child
- of_get_child_by_name
- 找到属性
- of_find_property
- 找到属性值
- of_get_property
- of_property_count_elems_of_size
- of_property_read_u32
- of_property_read_u32_index
- of_property_read_variable_u8_array和of_property_read_variable_u16_array和of_property_read_variable_u32_array和of_property_read_variable_u64_array
- of_property_read_string
- 关于头文件
- 1 处理 dtb
- 2 处理 device_node
- 3 处理 platform_device
- 怎么修改设备树文件
概述
为什么要引入总线设备架构?为了更好扩展和减少内核的臃肿
使用总线设备架构会导致linux内核臃肿,在linux内核之外,利用设备树dtb(配置文件)去定义不同单板平台的引脚资源信息,可以保持linux内核的干净,且替换设备树可以不用去编译内核文件,便于开发
开发板中设备树文件目录结构
输入:ls /sys/firmware输出:/devicetree fdt
-
devicetree文件夹目录下是以目录结构呈现的 dtb 文件, 根节点对应 base 目录,每一个节点对应一个目录, 每一个属性对应一个文件。
- 这些属性的值如果是字符串,可以使用
cat 命令把它打印出来;对于数值,可以用hexdump把它打印出来。
- 这些属性的值如果是字符串,可以使用
-
fdt文件就是dtb文件,可以反编译为dts文件
./scripts/dtc/dtc -I dtb -O dts -o tmp.dts arch/arm/boot/dts/xxx.dtb // 反编译 dtb 为dts
一个单板启动时,U-boot 先运行,它的作用是启动内核。U-boot 会把内核和设备树文件都读入内存,然后启动内核。在启动内核时会把设备树在内存中的地址告诉内核。在内核的打印信息中, ftdfile的属性值会指定设备树挂载哪个文件
设备树文件语法
设备树文件dts,使用时需要编译为dtb文件
设备树文件参考实例:
例如:dts 文件如下
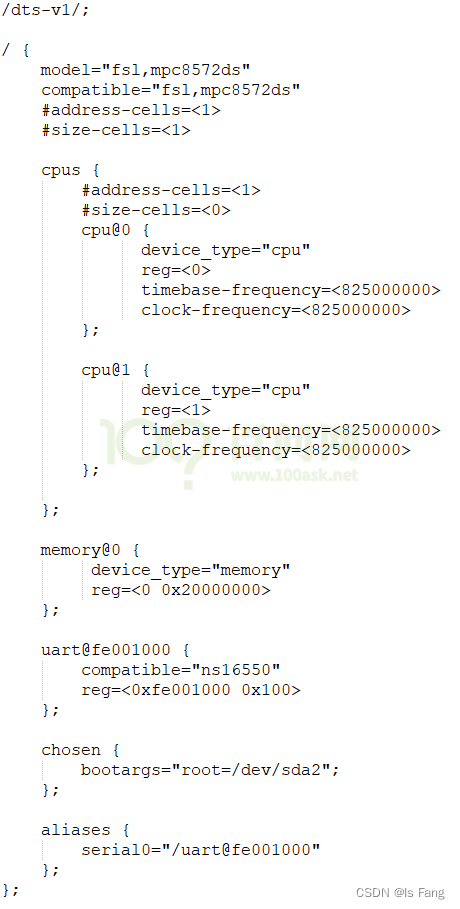
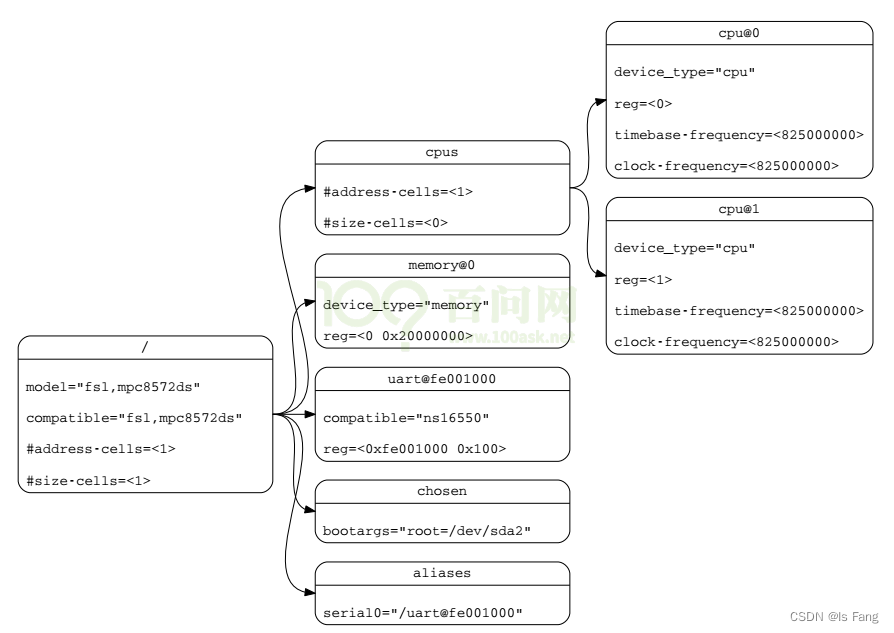
它对应的 dtb 文件如下:
Devicetree 格式
DTS 文件的格式
DTS 文件布局(layout):
/dts-v1/; // 表示版本
[memory reservations] // 格式为: /memreserve/ <address> <length>;
/ {[property definitions][child nodes]
};
node 的格式
设备树中的基本单元,被称为“node”,其格式为:
[label:] node-name[@unit-address] {[properties definitions][child nodes]
};
label 是标号,可以省略。label 的作用是为了方便地引用 node,比如:
/dts-v1/;
/ {uart0: uart@fe001000 {compatible="ns16550";reg=<0xfe001000 0x100>;};
};
可以使用下面 2 种方法来修改 uart@fe001000 这个 node:
// 在根节点之外使用 label 引用 node :
&uart0 {status = “disabled”;
};
//或在根节点之外使用全路径:
&{/uart@fe001000} {status = “disabled”;
};
properties 的格式
简单地说,properties 就是“name=value”,value 有多种取值方式。
有多种格式:
- Property 格式 1:
[label:] property-name = value;
- Property 格式 2(没有值):
[label:] property-name;
- Property 取值只有 3 种:
1. arrays of cells(1 个或多个 32 位数据, 64 位数据使用 2 个 个 32 位数据表示),
2. string( 字符串),
3. bytestring(1 个或多个字节)
示例:
interrupts = <17 0xc>;//Arrays of cells : cell 就是一个 32 位的数据,用尖括号包围起来clock-frequency = <0x00000001 0x00000000>;//64bit 数据使用 2 个 cell 来表示,用尖括号包围起来:compatible = "simple-bus";//A null-terminated string (有结束符的字符串),用双引号包围起来:local-mac-address = [00 00 12 34 56 78]; //A bytestring(字节序列) ,用中括号包围起来;每个 byte 使用 2 个 16进制数来表示compatible = "ns16550", "ns8250";//可以是各种值的组合, 用逗号隔开:example = <0xf00f0000 19>, "a strange property format";//可以是各种值的组合, 用逗号隔开:
dts 文件包含 dtsi 文件
设备树文件不需要我们从零写出来,内核支持了某款芯片比如 imx6ull,
在内核的 arch/arm64/boot/dts (或arch/arm32/boot/dts)目录下就有了能用的设备树模板,一般命名为xxxx.dtsi。“i”表示“include”,被别的文件引用的。根据某款芯片制作出了自己的单板,所用资源跟 xxxx.dtsi 是大部分相同,小部分不同,所以需要引脚 xxxx.dtsi 并修改。dtsi 文件跟 dts 文件的语法是完全一样的。dts 中可以包含.h 头文件,也可以包含 dtsi 文件,在.h 头文件中可以定义一些宏。
格式:
/dts-v1/;
#include <dt-bindings/input/input.h>
#include "stm32mp15xx-100ask.dtsi"
/ {……
};
常用的属性
#address-cells 、#size-cells
- cell 指一个 32 位的数值,
- address-cells:address 要用多少个 32 位数来表示;
- size-cells:size 要用多少个 32 位数来表示。
示例:比如一段内存,怎么描述它的起始地址和大小?
/ {
#address-cells = <1>;//address-cells 为 1,所以 reg 中用 1 个数来表示地址,即用0x80000000 来表示地址
#size-cells = <1>;//size-cells 为 1,所以 reg 中用 1 个数来表示大小,即用 0x20000000 表示大小:
memory {reg = <0x80000000 0x20000000>;};
};
compatible
“compatible”表示“兼容”,对于某个 LED,内核中可能有 A、B、C 三个
驱动都支持它,那可以这样写:
led {compatible = “A”, “B”, “C”;
};
内核启动时,就会为这个 LED 按这样的优先顺序为它找到驱动程序:A、B、C。
根节点下也有 compatible 属性,用来选择哪一个“machine desc”(意思是机器描述):一个内核可以支持 machine A,也支持 machine B,内核启动后会根据根节点的compatible 属性找到对应的 machine desc 结构体,执行其中的初始化函数。compatible 的值,建议采取这样的形式:"manufacturer,model",即“厂家名,模块名”。
model
model 属性与 compatible 属性有些类似,但是有差别。compatible 属性是一个字符串列表,表示可以你的硬件兼容 A、B、C 等驱动;
model 用来准确地定义这个硬件是什么。
比如根节点中可以这样写:
{compatible = "samsung,smdk2440", "samsung,mini2440";model = "jz2440_v3";
};
它表示这个单板,可以兼容内核中的“smdk2440”,也兼容“mini2440”。从 compatible 属性中可以知道它兼容哪些板,但是它到底是什么板?用model 属性来明确。
status
dtsi 文件中定义了很多设备,但是在你的板子上某些设备是没有的。这时你可以给这个设备节点添加一个 status 属性,设置为“disabled”:
&uart1 {status = "disabled";
};
设备的status的属性值有如下:

reg
reg 的本意是 register,用来表示寄存器地址。但是在设备树里,它可以用来描述一段空间。反正对于 ARM 系统,寄存器和内存是统一编址的,即访问寄存器时用某块地址,访问内存时用某块地址,在访问方法上没有区别。
reg 属性的值,是一系列的“address size”,用多少个 32 位的数来表示 address 和 size,由其父节点的#address-cells、#size-cells 决定。
/ {
#address-cells = <1>;//address-cells 为 1,所以 reg 中用 1 个数来表示地址,即用0x80000000 来表示地址
#size-cells = <1>;//size-cells 为 1,所以 reg 中用 1 个数来表示大小,即用 0x20000000 表示大小:
memory {reg = <0x80000000 0x20000000>;};
};
设备不同,reg属性表示的内容就不同,例如CPU节点,设置了#address-cells 、#size-cells属性后,通过reg属性可以区分两个cpu
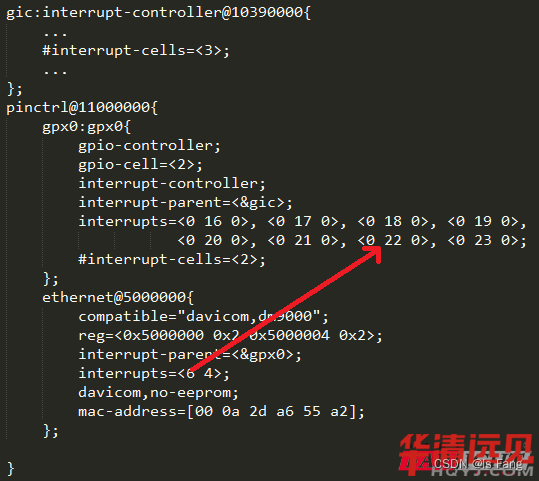
interrupt
interrupt-parent 标识此设备节点属于哪一个中断控制器,如果没有设置这个属性,会自动依附父节点的;
interrupts 一个中断标识符列表,表示每一个中断输出信号,引用中断号及中断触发类型
#interrupt-cells 这是中断控制器节点的属性,用来标识这个控制器需要几个单位做中断描述符;
interrupt-controller 一个空属性用来声明这个node接收中断信号;
比如:父节点的#interrupt-cells的值是3,则子节点的interrupts一个cell有三个32bits整型值,<中断域 中断 触发方式>
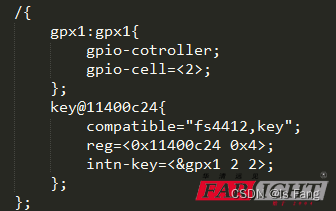
gpio属性
gpio-controller:说明该节点描述的是一个gpio控制器
#gpio-cells:描述gpio使用节点的属性一个cell的内容
属性名=<&引用GPIO节点别名 GPIO标号 工作模式>;
name( 过时了,建议不用)
它的值是字符串,用来表示节点的名字。在跟 platform_driver 匹配时,优先级最低。compatible 属性在匹配过程中,优先级最高。
device_type(过时了,建议不用)
它的值是字符串,用来表示节点的类型。在跟 platform_driver 匹配时,优先级为中。compatible 属性在匹配过程中,优先级最高
常用的节点(node)
根节点
dts 文件中必须有一个根节点:
根节点中必须有这些属性:
#address-cells // 在它的子节点的 reg 属性中, 使用多少个 u32 整数来描述地址(address)
#size-cells // 在它的子节点的 reg 属性中, 使用多少个 u32 整数来描述大小(size)
compatible // 定义一系列的字符串, 用来指定内核中哪个 machine_desc 可以支持本设备// 即这个板子兼容哪些平台// uImage : smdk2410 smdk2440 mini2440 ==> machine_desc
model // 咱这个板子是什么// 比如有 2 款板子配置基本一致, 它们的 compatible 是一样的// 那么就通过 model 来分辨这 2 款板子
CPU 节点
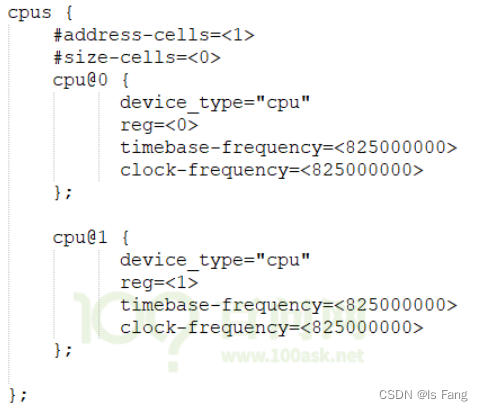
一般不需要我们设置,在 dtsi 文件中都定义好了:
cpus {#address-cells = <1>;#size-cells = <0>;cpu0: cpu@0 {.......}
};
memory 节点
芯片厂家不可能事先确定你的板子使用多大的内存,所以 memory 节点需要
板厂设置,比如
memory {reg = <0x80000000 0x20000000>;
};
chosen 节点
我们可以通过设备树文件给内核传入一些参数,这要在 chosen 节点中设置
bootargs 属性:
chosen {bootargs = "noinitrd root=/dev/mtdblock4 rw init=/linuxrc console=ttySAC0,115200";//指定去哪个分区找到根文件系统等
};
编译、更换设备树
自动编译
自动编译首先使用gcc编译器对#include文件进行预处理,然后再利用dtc编译器编译出dtb文件
首先要设置 ARCH、CROSS_COMPILE、PATH 这三个环境变量后,进入 ubuntu 上板子内核源码的目录,在Linux内核源码根目录下,执行如下命令即可编译 dtb 文件:
make dtbs V=1
编译好的文件在路径由DTC指定,在 arch/arm64/boot/dts 目录下,移植到开发板的共享文件夹中,在开发板中输入如下指令可以查看到原来挂载的设备树文件有哪些:
cd /boot/
先保存源文件,然后覆盖源文件,重启后会挂载新的设备树,进入该目录查看是否有新添加的设备节点
cd /sys/firmware/devicetree/base
ls 节点名称
手动编译
内核目录下 scripts/dtc/dtc 是设备树的编译工具,直接使用它的话,包含其他文件时不能使用“#include”,而必须使用“/incldue”。
编译、反编译的示例命令如下,“-I”指定输入格式,“-O”指定输出格式,“-o”指定输出文件:
./scripts/dtc/dtc -I dts -O dtb -o tmp.dtb arch/arm/boot/dts/xxx.dts // 编译 dts 为 为 dtb
./scripts/dtc/dtc -I dtb -O dts -o tmp.dts arch/arm/boot/dts/xxx.dtb // 反编译 dtb 为dts
内核对设备树的处理
从源代码文件 dts 文件开始,设备树的处理过程为:

- ① dts 在 PC 机上被编译为 dtb 文件;
- ② u-boot 把 dtb 文件传给内核;
- ③ 内核解析 dtb 文件,把每一个节点都转换为 device_node 结构体;
- ④ 对于某些 device_node 结构体,会被转换为 platform_device 结构体。
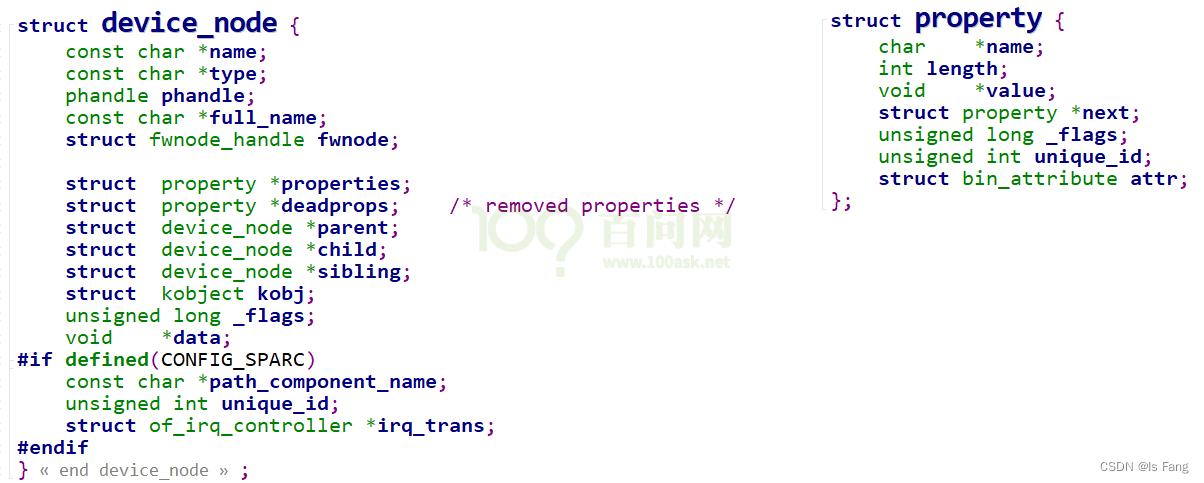
dtb 中每一个节点都被转换为 device_node 结构体
device_node 结构体: 定义节点信息,例如父子节点
property 结构体:定义属性名和属性值
通过节点信息可以找到父子节点,所以内核从根节点开始建立连接。
根节点被保存在全局变量 of_root 中,从 of_root 开始可以访问到任意节点。
哪些设备树节点会被转换为 platform_device
① 根节点下含有 compatile 属性的子节点
② 含有特定 compatile 属性的节点的子节点
- 如果一个节点(父节点)的 compatile 属性,它的值是这 4 者之一:“simple-bus”,“simple-mfd”,“isa”,“arm,amba-bus”, 那 么 它 的 子 结 点 ( 需 含compatile 属性)也可以转换为 platform_device。
③ 总线 I2C、SPI 节点下的子节点:不转换为 platform_device
- 某个总线下到子节点,应该交给对应的总线驱动程序来处理, 它们不应该被转换为 platform_device。
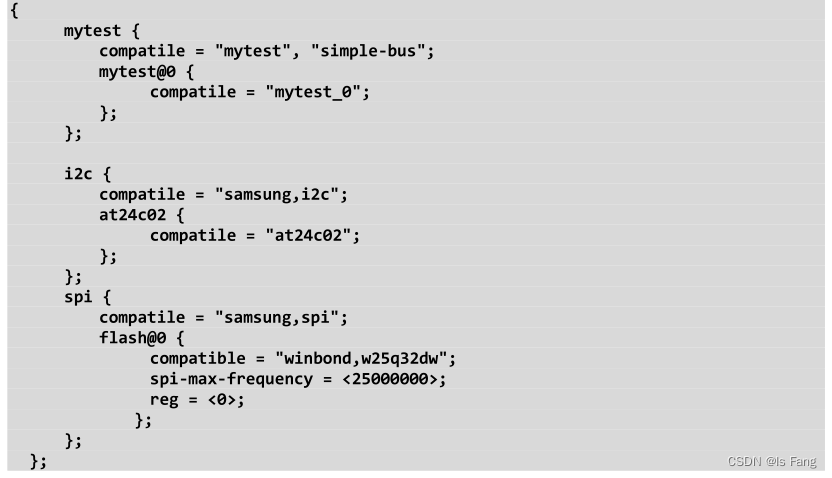
比如以下的节点中:
- /mytest 会被转换为 platform_device, 因为它兼容"simple-bus";它的子节点/mytest/mytest@0 也会被转换为 platform_device
- /i2c 节点一般表示 i2c 控制器, 它会被转换为 platform_device, 在内核中有对应的 platform_driver;
- /i2c/at24c02 节点不会被转换为 platform_device, 它被如何处理完全由父节点的 platform_driver 决定, 一般是被创建为一个 i2c_client。
- 类似的也有/spi 节点, 它一般也是用来表示 SPI 控制器, 它会被转换为platform_device, 在内核中有对应的 platform_driver;
- /spi/flash@0 节点不会被转换为 platform_device, 它被如何处理完全由父节点的 platform_driver 决定, 一般是被创建为一个 spi_device。
怎么转换为 platform_device
- platform_device 中含有 resource 数组, 它来自 device_node 的 reg,interrupts 属性;
- platform_device.dev.of_node 指向 device_node, 可以通过它获得其他属性
platform_device 如何与 platform_driver 配对
从设备树转换得来的 platform_device 会被注册进内核里,以后当我们每注册一个 platform_driver 时,它们就会两两确定能否配对,如果能配对成功就调用 platform_driver 的 probe 函数
platform_bus-type总线匹配规则
调用platform_match函数进行匹配
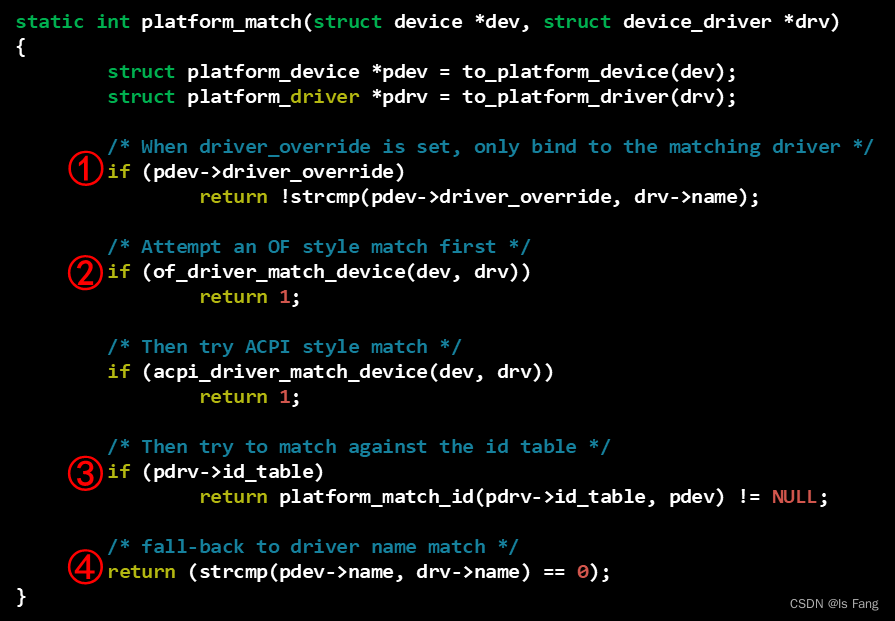
一图概括所有匹配过程
最先比较:是否强制选择某个 driver:
是则比较platform_device.driver_override 和 和 platform_driver.driver.name
引入设备树之后,会增加如下的匹配方法:
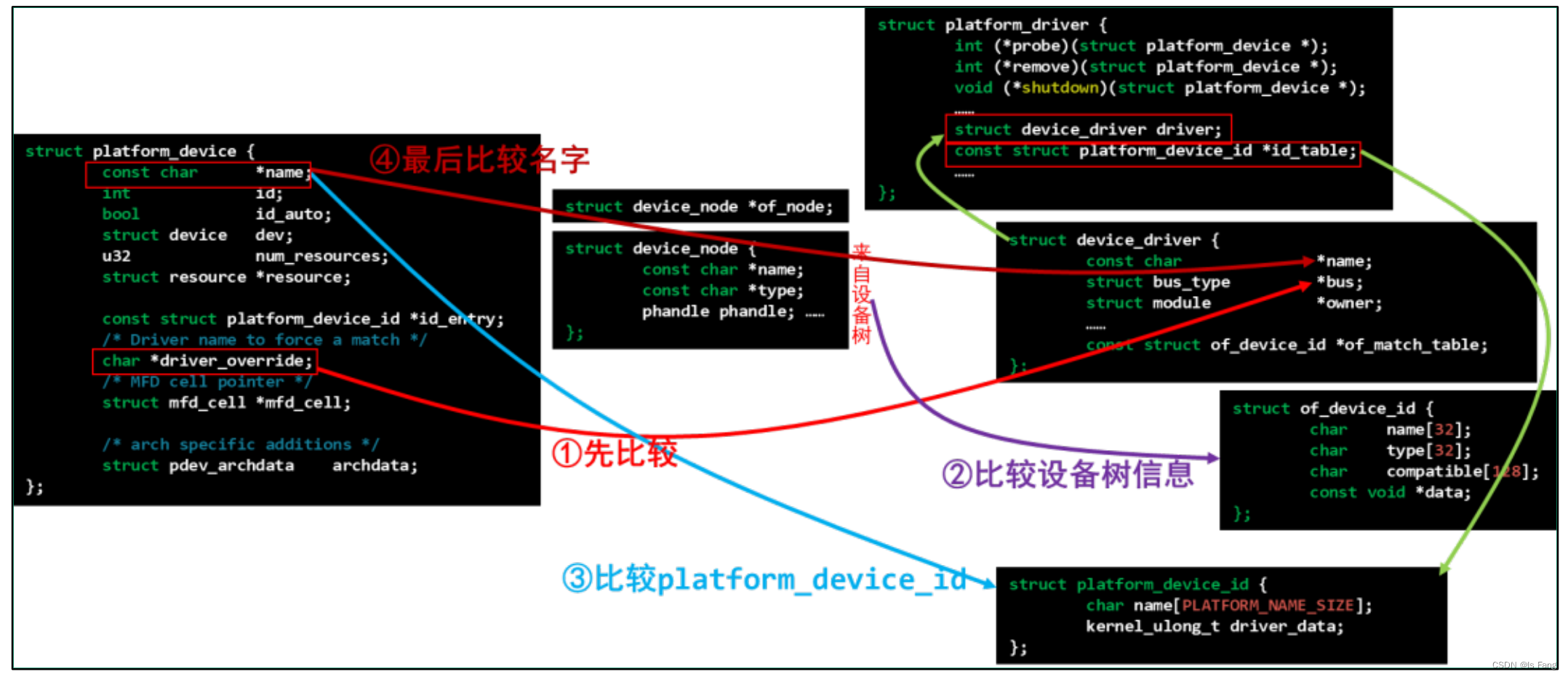
比较:设备树信息:platform_device.dev.of_node 和 platform_driver.driver.of_match_table
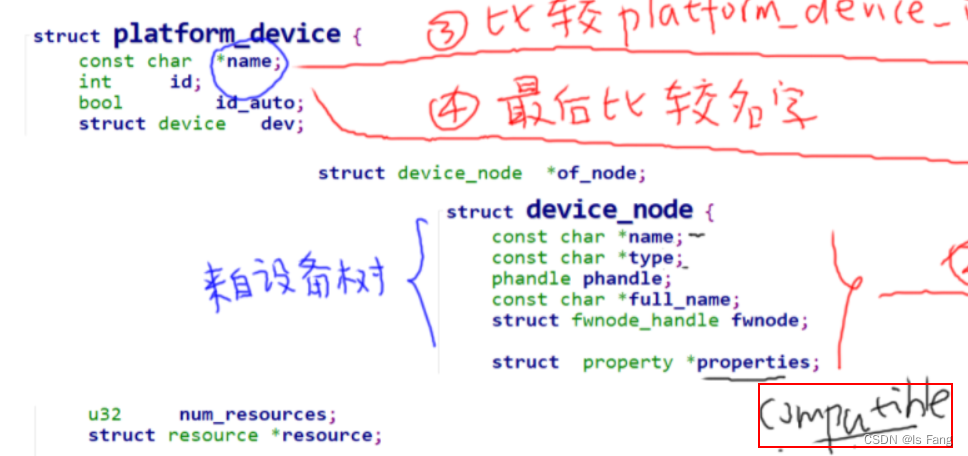
由设备树节点转换得来的 platform_device 中,含有一个结构体:struct device dev,该结构体中含有一个结构体struct device_node of_node。它的类型如下:
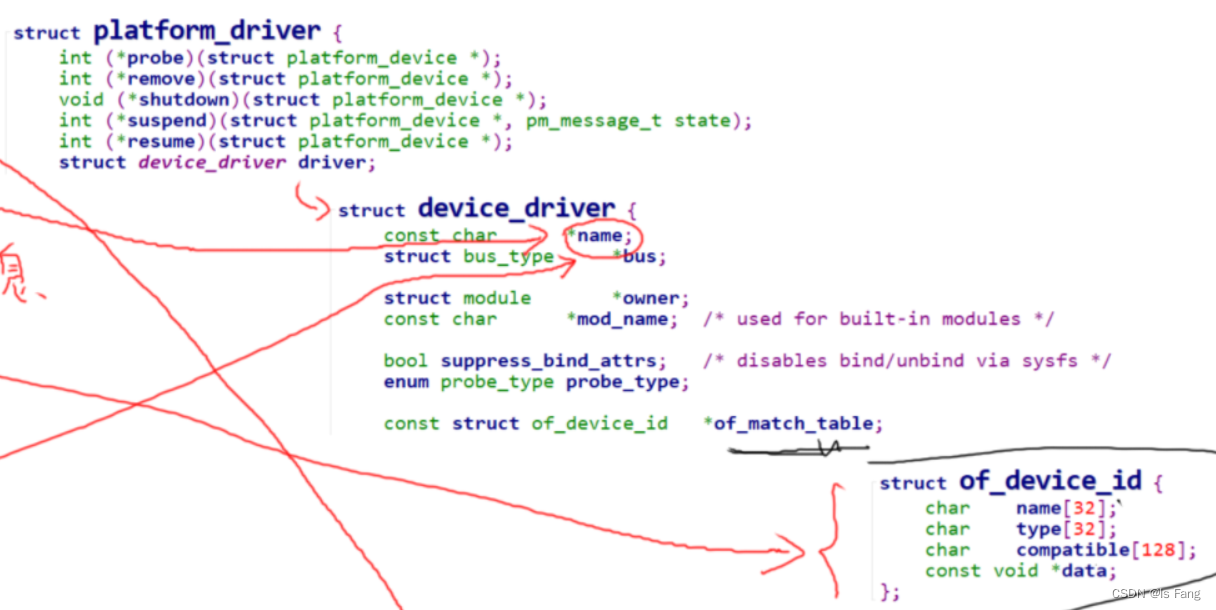
由设备树节点转换得来的 platform_driver 中,含有一个结构体:struct device_driver driver,该结构体中含有一个数组struct of_device_id *of_match_table,该数组中保存结构体类型如下:
使用设备树信息来判断 dev 和 drv 是否配对时:
- 首先,如果 of_match_table 中含有 compatible 值,就跟 dev 的 compatile属性比较,若一致则成功,否则返回失败;
- 其次,如果 of_match_table 中含有 type 值,就跟 dev 的 device_type 属性比较,若一致则成功,否则返回失败;
- 最后,如果 of_match_table 中含有 name 值,就跟 dev 的 name 属性比较,若一致则成功,否则返回失败。
而设备树中建议不再使用 devcie_type 和 name 属性,所以基本上只使用设备节点的 compatible 属性来寻找匹配的 platform_driver。
没引入设备树之前也有如下的匹配方法:
比较 platform_device. name 和 platform_driver.id_table[i].name ,id_table 中可能有多项。platform_driver.id_table 是“ platform_device_id ”指针,表示该 drv 支持若干个 device,它里面列出了各个 device 的{.name, .driver_data},其中的“name”表示该 drv 支持的设备的名字,driver_data 是些提供给该 device的私有数据。
最后比较platform_device.name 和 platform_driver.driver.nameplatform_driver.id_table 可能为空,这时可以根据platform_driver.driver.name来寻找同名的 platform_device 。
获取设备资源
生成的platform_device节点
对于生成的platform_device的节点,提供了两个函数:of_find_device_by_node和platform_get_resource
of_find_device_by_node
函数原型为:
extern struct platform_device *of_find_device_by_node(struct device_node *np);
设备树中的每一个节点,在内核里都有一个 device_node;你可以使用device_node 去找到对应的 platform_device
platform_get_resource
LED驱动(总线设备架构)——STM32MP157中的获取指定资源的函数有platform_get_resource,这个函数跟设备树没什么关系 , 但是设备树中的节点被转换为platform_device 后,设备树中的 reg 属性、interrupts 属性也会被转换为“resource”。
函数原型:
/**
* platform_get_resource - get a resource for a device
* @dev: platform device
* @type: resource type // 取哪类资源?IORESOURCE_MEM 、IORESOURCE_REG
* // IORESOURCE_IRQ 等
* @num: resource index // 这类资源中的哪一个?
*/
struct resource *platform_get_resource(struct platform_device *dev,unsigned int type, unsigned int num);
第二个参数:
- 对于设备树节点中的 reg 属性,它对应 IORESOURCE_MEM 类型的资源;
- 对于设备树节点中的 interrupts 属性,它对应 IORESOURCE_IRQ 类型的资源。
对于非指定的资源,需用调用内核函数(会调用到of_node全局变量),首先找到节点,然后找到资源
不会生成platform_device节点
有些节点不会生成 platform_device,但内核也会把 dtb 文件先解析出一系列的 device_node 结构体,我们可以直接访问这些 device_node。device_node 和 property 的结构体定义如下
找到节点
of_find_node_by_path
根据路径找到节点,比如“/”就对应根节点,“/memory”对应 memory 节点。
函数原型:
static inline struct device_node *of_find_node_by_path(const char *path);
of_find_node_by_name
根据名字找到节点,节点如果定义了 name 属性,那我们可以根据名字找到它。
函数原型:
extern struct device_node *of_find_node_by_name(struct device_node *from,const char *name);
- 参数 from 表示从哪一个节点开始寻找,传入 NULL 表示从根节点开始寻找。
- 但是在设备树的官方规范中不建议使用“name”属性,所以这函数也不建议使用。
of_find_node_by_type
根据类型找到节点,节点如果定义了 device_type 属性,那我们可以根据类型找到它。
函数原型:
extern struct device_node *of_find_node_by_type(struct device_node *from,const char *type);
- 参数 from 表示从哪一个节点开始寻找,传入 NULL 表示从根节点开始寻找。
- 但是在设备树的官方规范中不建议使用“device_type”属性,所以这函数也不建议使用。
of_find_compatible_node
根据 compatible 找到节点,节点如果定义了 compatible 属性,那我们可以根据 compatible 属性找到它。
函数原型:
extern struct device_node *of_find_compatible_node(struct device_node *from,const char *type,const char *compat);
- 参数 from 表示从哪一个节点开始寻找,传入 NULL 表示从根节点开始寻找。
- 参数 compat 是一个字符串,用来指定 compatible 属性的值;
- 参数 type 是一个字符串,用来指定 device_type 属性的值,可以传入NULL。
of_find_node_by_phandle
根据 phandle 找到节点。dts 文件被编译为 dtb 文件时,每一个节点都有一个数字 ID,这些数字 ID 彼此不同。可以使用数字 ID 来找到 device_node。这些数字 ID 就是 phandle。
函数原型:
extern struct device_node *of_find_node_by_phandle(phandle handle);
- 参数 from 表示从哪一个节点开始寻找,传入 NULL 表示从根节点开始寻找。
of_get_parent
找到 device_node 的父节点。
函数原型:
extern struct device_node *of_get_parent(const struct device_node *node);
- 参数 from 表示从哪一个节点开始寻找,传入 NULL 表示从根节点开始寻找。
of_get_next_parent
这个函数名比较奇怪,怎么可能有“next parent”?它实际上也是找到 device_node 的父节点,跟 of_get_parent 的返回结
果是一样的。
差别在于它多调用下列函数,把 node 节点的引用计数减少了 1。这意味着调用 of_get_next_parent 之后,你不再需要调用 of_node_put 释放 node 节点。
of_node_put(node);
函数原型:
extern struct device_node *of_get_next_parent(struct device_node *node);
- 参数 from 表示从哪一个节点开始寻找,传入 NULL 表示从根节点开始寻找。
of_get_next_child
取出下一个子节点。
函数原型:
extern struct device_node *of_get_next_child(const struct device_node *node,struct device_node *prev);
- 参数 node 表示父节点;
- prev 表示上一个子节点,设为 NULL 时表示想找到第 1 个子节点。
不断调用 of_get_next_child 时,不断更新 pre 参数,就可以得到所有的子节点。
of_get_next_available_child
取出下一个“可用”的子节点,有些节点的 status 是“disabled”,那就会跳过这些节点。
函数原型:
struct device_node *of_get_next_available_child(const struct device_node *node,struct device_node *prev);
- 参数 node 表示父节点;
- prev 表示上一个子节点,设为 NULL 时表示想找到第 1 个子节点。
of_get_child_by_name
根据名字取出子节点。
函数原型:
extern struct device_node *of_get_child_by_name(const struct device_node *node,const char *name);
- 参数 node 表示父节点;
- name 表示子节点的名字。
找到属性
of_find_property
函数原型:
extern struct property *of_find_property(const struct device_node *np,const char *name,int *lenp);
- 参数 np 表示节点,我们要在这个节点中找到名为 name 的属性。
- lenp 用来保存这个属性的长度,即它的值的长度。
找到属性值
of_get_property
根据名字找到节点的属性,并且返回它的值。函数原型:
/*
* Find a property with a given name for a given node
* and return the value.
*/
const void *of_get_property(const struct device_node *np,
const char *name,
int *lenp)
- 参数 np 表示节点,我们要在这个节点中找到名为 name 的属性,然后返回
它的值。 - lenp 用来保存这个属性的长度,即它的值的长度。
of_property_count_elems_of_size
根据名字找到节点的属性,确定它的值有多少个元素(elem)。
函数原型:
int of_property_count_elems_of_size(const struct device_node *np,const char *propname,int elem_size)
- 参数 np 表示节点,我们要在这个节点中找到名为 propname 的属性,该函数内部结尾返回结果的函数如下:
return prop->length / elem_size;
在设备树中,节点大概是这样:
xxx_node {xxx_pp_name = <0x50000000 1024> <0x60000000 2048>;
};调用 of_property_count_elems_of_size(np, “xxx_pp_name”, 8) 时,返回值是 2;
调用 of_property_count_elems_of_size(np, “xxx_pp_name”, 4) 时,返回值是 4。
of_property_read_u32
读整数 u32/u64
函数原型为:
static inline int of_property_read_u32(const struct device_node *np,const char *propname,u32 *out_value);extern int of_property_read_u64(const struct device_node *np,const char *propname,u64 *out_value);
在设备树中,节点大概是这样:
xxx_node {name1 = <0x50000000>;name2 = <0x50000000 0x60000000>;
};
调用 of_property_read_u32 (np, “name1”, &val) 时,val 将得到值 0x50000000 ;
调用 of_property_read_u64 (np, “name2”, &val) 时 , val 将得到值0x6000000050000000 。
of_property_read_u32_index
读某个整数 u32/u64
函数原型为:
extern int of_property_read_u32_index(const struct device_node *np,const char *propname,u32 index,u32 *out_value);
在设备树中,节点大概是这样:
xxx_node {name2 = <0x50000000 0x60000000>;
};调用 of_property_read_u32 (np, “name2”, 1, &val) 时,val 将得到值 0x60000000 。
of_property_read_variable_u8_array和of_property_read_variable_u16_array和of_property_read_variable_u32_array和of_property_read_variable_u64_array
读数组
函数原型为:
int of_property_read_variable_u8_array(const struct device_node *np,const char *propname,u8 *out_values,size_t sz_min,size_t sz_max);int of_property_read_variable_u16_array(const struct device_node *np,const char *propname,u16 *out_values,size_t sz_min,size_t sz_max);int of_property_read_variable_u32_array(const struct device_node *np,const char *propname,u32 *out_values,size_t sz_min,size_t sz_max);int of_property_read_variable_u64_array(const struct device_node *np,const char *propname,u64 *out_values,size_t sz_min,size_t sz_max);
在设备树中,节点大概是这样:
xxx_node {name2 = <0x50000012 0x60000034>;
};上述例子中属性 name2 的值,长度为 8。调用 of_property_read_variable_u8_array (np, “name2”, out_values, 1, 10) 时,out_values 中将会保存这 8 个字节: 0x12,0x00,0x00,0x50,0x34,0x00,0x00,0x60 。
调用 of_property_read_variable_u16_array (np, “name2”, out_values, 1, 10) 时,out_values 中将会保存这 4 个 16 位数值: 0x0012, 0x5000,0x0034,0x6000 。总之,这些函数要么能取到全部的数值,要么一个数值都取不到;如果值的长度在 sz_min 和 sz_max 之间,就返回全部的数值;否则一个数值都不返回of_property_read_string
读字符串
函数原型为:
int of_property_read_string(const struct device_node *np,const char *propname,const char **out_string);
- 返回节点 np 的属性(名为 propname)的值;
- (*out_string)指向这个值,把它当作字符串。
关于头文件
设备树的处理过程是:dtb -> device_node -> platform_device。
1 处理 dtb
of_fdt.h // dtb 文件 的相关操作函数, 我们一般用不到,
// 因为 dtb 文件在内核中已经被转换为 device_node 树( 它更易于使用)
2 处理 device_node
of.h // 提供设备树的一般处理函数,
// 比如 of_property_read_u32( 读取某个属性的 u32 值),
// of_get_child_count( 获取某个 device_node 的子节点数)
of_address.h // 地址相关的函数,
// 比如 of_get_address( 获得 reg 属性中的 addr, size 值)
// of_match_device (从 从 matches 数组中取出与当前设备最匹配的一项)
of_dma.h // 设备树中 DMA 相关属性的函数
of_gpio.h // GPIO 相关的函数
of_graph.h // GPU 相关驱动中用到的函数, 从设备树中获得 GPU 信息
of_iommu.h // 很少用到
of_irq.h // 中断相关的函数
of_mdio.h // MDIO (Ethernet PHY) API
of_net.h // OF helpers for network devices.
of_pci.h // PCI 相关函数
of_pdt.h // 很少用到
of_reserved_mem.h // reserved_mem 的相关函数
3 处理 platform_device
of_platform.h // 把 把 device_node 转换为 platform_device 时用到的 函数,
// 比如 of_device_alloc( 根据 device_node 分配设置 platform_device),
// of_find_device_by_node ( 根据 device_node 查找到 platform_device),
// of_platform_bus_probe ( 处理 device_node 及它的子节点)
of_device.h // 设备相关的 函数, 比如 of_match_device
怎么修改设备树文件
一个写得好的驱动程序, 它会尽量确定所用资源。只把不能确定的资源留给设备树, 让设备树来指定。根据原理图确定"驱动程序无法确定的硬件资源",再在设备树文件中填写对应内容。
那么, 所填写内容的格式是什么?
① 使用芯片厂家提供的工具
- 有些芯片,厂家提供了对应的设备树生成工具,可以选择某个引脚用于某
- 你再把这些节点复制到内核的设备树文件里即可。
② 看绑定文档
- 内核文档 Documentation/devicetree/bindings/
- 做得好的厂家也会提供设备树的说明文档
③ 参考同类型单板的设备树文件
④ 网上搜索
⑤ 实在没办法时, 只能去研究驱动源码
参考:韦东山Linux教学视频
![[高通平台][WLAN] IEEE802.11mc 介绍](https://img-blog.csdnimg.cn/4679ee740569443f9ef1e0403ba584a6.png)