R128 S2 是全志提供的一款 M33(ARM)+C906(RISCV-64)+HIFI5(Xtensa) 三核异构 SoC,同时芯片内部 SIP 有 1M SRAM、8M LSPSRAM、8M HSPSRAM 以及 16M NORFLASH。
本文档作为 R128 FreeRTOS SDK 开发指南,旨在帮助软件开发工程师、技术支持工程师快速上手,熟悉 R128 FreeRTOS SDK 的开发流程。
SDK 架构
R128 包含 3 个核,需要编译 M33+C906+HIFI5 共3 个核的镜像。启动时同时运行三个 RTOS 系统。其中 M33 与 C906 使用的是 FreeRTOS v10.4.3,从 https://www.freertos.org/RTOS.html 获取,HIFI5 使用的 FreeRTOS 是根据Cadence Support 的推荐的 https://github.com/foss‑xtensa/amazon‑freertos (tag:v1.7‑xtensa)版本
开发 HIFI5 需要 Cadence Xtensa 的 IDE 工具, DSP 的 XCC 工具链包。Cadence Xtensa 的授权 License,用于服务器代码编译和 Xplorer 仿真使用。这些工具需要向 Cadence 申请授权,链接:https://www.cadence.com/en_US/home/tools/ip/tensilica-ip/technologies.html,Xplorer 下载链接:https://www.cadence.com/en_US/home/tools/ip/tensilica-ip/sdk-download.html。
SDK 软件框架
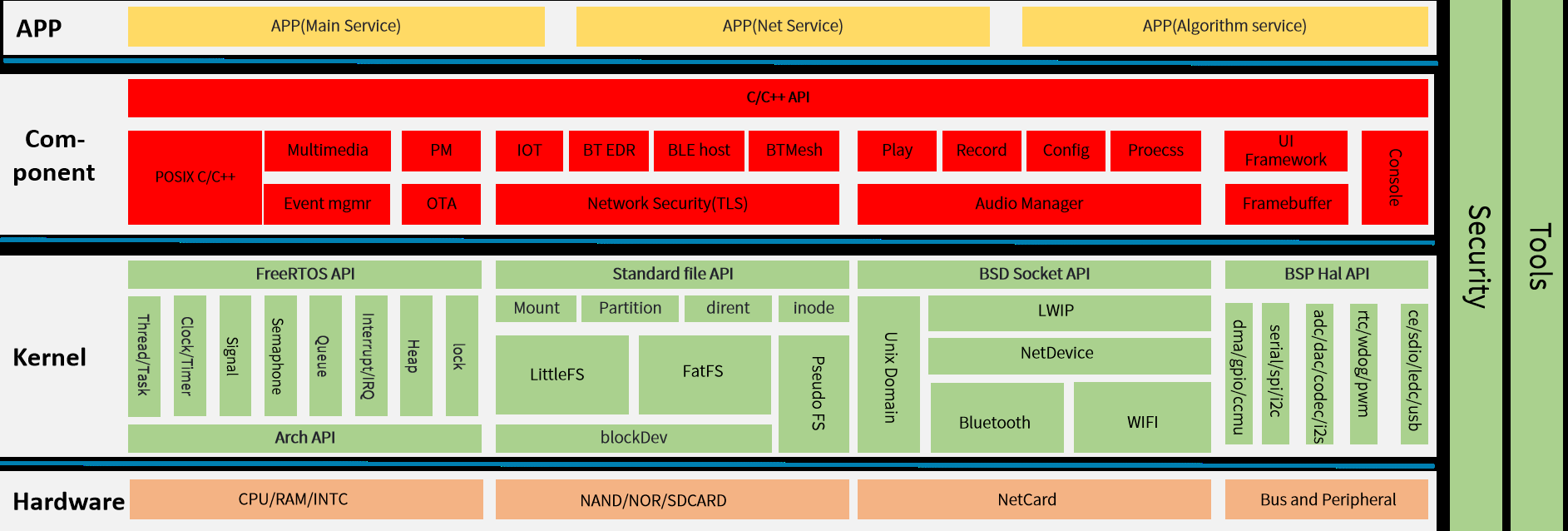
R128 软件框架如上图所示,一共4 层,分别为硬件层、内核层、组件层、应用层。
- Hardware。硬件层包括处理器、内存、存储介质、无线网卡、总线以及外设等。
- Kernel。内核层包括FreeRTOS 核心系统、文件系统、网络系统、BSP 驱动等。
- Component。组件层包括控制台、多媒体、功耗管理、OTA、音频系统、显示系统、图像采集等。
- APP。应用层包括各种应用demo。
SDK 目录结构
以R128-S2芯片为例,SDK 目录结构如下,重点目录进行了展开处理
.
├── board # 板级配置目录
│ ├── common # 公共板级配置目录
│ │ ├── configs # 公共板级配置
│ │ └── data # 公共数据
│ │ ├── reserve # Wi-Fi & BT 固件
│ │ ├── secret # 公共安全区
│ │ └── UDISK # 公共 UDISK 分区
│ └── r128s2 # R128 S2 芯片配置目录
│ ├── 86panel # R128 S2 86面板开发板 板级配置目录
│ │ ├── bin # 86面板开发板固件,引导等bin
│ │ ├── configs # 86面板开发板配置文件,引脚复用,分区表等配置文件
│ │ │ └── ota # 86面板开发板配置文件,OTA相关配置文件
│ │ └── data # 86面板开发板数据
│ │ ├── reserve
│ │ ├── secret
│ │ └── UDISK
│ └── module # R128 S2 Module 模块板级配置目录
│ ├── bin # R128 S2 Module 固件,引导等bin
│ ├── configs # R128 S2 Module 配置文件,引脚复用,分区表等配置文件
│ │ └── ota # R128 S2 Module 配置文件,OTA相关配置文件
│ └── data # R128 S2 Module 数据
│ ├── reserve
│ ├── secret
│ └── UDISK
├── lichee # 系统源码目录
│ ├── brandy-2.0 # 启动相关目录
│ │ ├── tools # U-Boot 使用的工具链
│ │ └── u-boot-2018 # U-Boot 启动代码
│ ├── rtos # M33/C906 FreeRTOS 系统、组件、应用
│ │ ├── arch # 处理器架构相关代码
│ │ │ ├── arm # ARM 处理器初始化、中断处理、异常处理、内存映射相关功能的实现
│ │ │ │ ├── armv8m
│ │ │ │ └── common
│ │ │ ├── common
│ │ │ └── risc-v # RISC-V 处理器初始化、中断处理、异常处理、内存映射相关功能的实现
│ │ │ ├── c906
│ │ │ ├── common
│ │ │ ├── includes
│ │ │ └── sun20iw2p1
│ │ ├── build # 编译临时文件输出目录
│ │ ├── components # 应用组件,libc、多媒体、lvgl等
│ │ │ ├── aw # Allwinner 提供的组件
│ │ │ │ ├── blkpart
│ │ │ │ ├── bluetooth
│ │ │ │ ├── ...
│ │ │ │ └── wireless_video
│ │ │ ├── common -> ../../rtos-components
│ │ │ └── thirdparty # 第三方提供的组件
│ │ │ ├── common
│ │ │ ├── console
│ │ │ ├── ...
│ │ │ └── vfs
│ │ ├── drivers # RTOS 驱动
│ │ │ ├── drv
│ │ │ │ ├── bluetooth
│ │ │ │ ├── ...
│ │ │ │ └── wireless
│ │ │ ├── osal
│ │ │ │ └── src
│ │ │ └── rtos-hal -> ../../rtos-hal/
│ │ ├── include # RTOS 头文件目录
│ │ │ ├── arch # 架构相关头文件
│ │ │ │ ├── arm
│ │ │ │ └── riscv
│ │ │ ├── drivers # 驱动相关头文件
│ │ │ ├── FreeRTOS_POSIX
│ │ │ ├── ...
│ │ │ └── sys
│ │ ├── kernel # FreeRTOS 内核
│ │ ├── projects # 方案工程目录,后文有详细介绍
│ │ ├── scripts # 编译脚手架脚本
│ │ └── tools # RTOS 使用的工具链
│ ├── rtos-components # 公共应用组件,libc、多媒体、lvgl等
│ │ ├── aw # Allwinner 提供的公共应用组件
│ │ └── thirdparty # 第三方提供的公共应用组件
│ └── rtos-hal # RTOS HAL驱动
│ ├── hal # HAL 驱动
│ ├── include # HAL 头文件
│ └── tools # HAL 相关工具
├── out # 打包输出的临时文件与最终镜像文件
│ └── r128s2
│ └── pro
└── tools # 用于存放打包相关的脚本、工具├── image-file├── scripts├── tool│ └── cppcheck├── win-tools└── xradio-tools├── data├── HcidumpXr├── NLink├── NTest└── sdd_editor
R128 SDK 目录结构如上所示,主要包括如下几个关键目录:
board:板级配置目录,用于存放芯片方案的配置文件,主要包括env配置、分区表配置、
sys_config.fex引脚复用配置等。lichee/brandy‑2.0:主要存放uboot 等代码。lichee/rtos:存放 M33/C906 FreeRTOS 系统、组件、应用。lichee/rtos‑components:公共组件目录。lichee/rtos‑hal:HAL BSP 驱动目录。用于存放各种驱动代码。out:用于保存打包时输出的临时文件与最终镜像文件。打包时自动生成此目录。tools:工具目录,用于存放打包相关的脚本、工具等。
lichee/rtos 目录
lichee/rtos├── arch # 处理器架构相关├── build # 编译临时文件输出目录├── components # 组件├── drivers # 驱动├── include├── kernel # FreeRTOS内核├── projects # 方案工程├── scripts└── tools # 工具链
lichee/rtos 目录主要包括arch(架构相关)、components(组件)、drivers(驱动)、include(头文件)、kernel(内核)、projects(工程)、toos(工具链) 几个目录。
arch 目录
arch 目录主要放置跟SoC 架构相关的内容,每个SoC 单独目录管理,主要包括跟R128 处理器相关的ARCH 初始化、中断处理、异常处理、内存映射相关功能的实现。
drivers 目录
drivers 目录包含R128 所需的外设驱动,主要包括各外设控制器驱动的具体实现(rtos‑hal 软连接)以及OSAL 层接口实现(osal)。
kernel 目录
kernel 目录主要包含FreeRTOS 的kernel 源码,ARMv8M 的portable 源码以及全志实现的系统功能相关代码。
.
├── FreeRTOS
│ ├── Makefile
│ └── Source
├── FreeRTOS-orig
│ ├── License
│ ├── Makefile
│ └── Source
├── Kconfig
├── Makefile
├── objects.mk
└── Posix├── CMakeLists.txt├── include├── Makefile└── source
projects 目录
projects 目录下的每一个子目录代表一个SoC 类别,每个 SoC 类别下面存放对应的方案,每个方案都有 m33 与c906 目录,在这些目录下面实现各处理器上第一个任务,选择不同的 project 编译出来的 bin 具有不同功能。每个 project 有独立的 FreeRTOSConfig 配置。
.
├── config.h # 公共配置头文件
├── Kconfig # Kconfig 引索文件
├── Makefile # Makefile
├── objects.mk # Makefile 构建脚本
└── r128s2 # R128 S2 平台方案├── bt.lds.S # 蓝牙协议栈等链接脚本├── Makefile # Makefile 构建脚本├── 86panel_c906 # 86panel 方案 C906 RISC-V 核相关文件│ ├── defconfig # 软件包配置文件│ ├── freertos.lds.S # 链接脚本│ ├── Kconfig # Kconfig 引索文件│ ├── Makefile # Makefile 构建脚本│ └── src # 86panel 方案 C906 RISC-V 核相关源码│ ├── alsa_config.c # alsa 框架插件配置文件│ ├── assert.c # 断言处理│ ├── card_default.c # 声卡配置文件│ ├── FreeRTOSConfig.h # FreeRTOS 配置文件│ ├── hooks.c # FreeRTOS 相关钩子函数配置│ └── main.c # FreeRTOS 程序入口├── wlan.lds.S # WiFi 链接文件└── xip.lds.S # xip 链接文件
Tools 目录
这个目录主要包含一些预编译好的交叉编译工具链,目前M33 基于GCC 8.3.1 的交叉编译环境,C906 基于GCC 8.4.0 的交叉编译器。
M33 编译器
Using built-in specs.
COLLECT_GCC=./arm-none-eabi-gcc
COLLECT_LTO_WRAPPER=/R128-FreeRTOS/lichee/rtos/tools/gcc-arm-none-eabi-8-2019-q3-update/bin/../lib/gcc/arm-none-eabi/8.3.1/lto-wrapper
Target: arm-none-eabi
Configured with: /tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/src/gcc/configure --target=arm-none-eabi --prefix=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/install-native --libexecdir=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/install-native/lib --infodir=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/install-native/share/doc/gcc-arm-none-eabi/info --mandir=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/install-native/share/doc/gcc-arm-none-eabi/man --htmldir=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/install-native/share/doc/gcc-arm-none-eabi/html --pdfdir=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/install-native/share/doc/gcc-arm-none-eabi/pdf --enable-languages=c,c++ --enable-plugins --disable-decimal-float --disable-libffi --disable-libgomp --disable-libmudflap --disable-libquadmath --disable-libssp --disable-libstdcxx-pch --disable-nls --disable-shared --disable-threads --disable-tls --with-gnu-as --with-gnu-ld --with-newlib --with-headers=yes --with-python-dir=share/gcc-arm-none-eabi --with-sysroot=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/install-native/arm-none-eabi --build=x86_64-linux-gnu --host=x86_64-linux-gnu --with-gmp=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/build-native/host-libs/usr --with-mpfr=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/build-native/host-libs/usr --with-mpc=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/build-native/host-libs/usr --with-isl=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/build-native/host-libs/usr --with-libelf=/tmp/jenkins/jenkins-GCC-8-build_toolchain_docker-594_20190704_1562200936/build-native/host-libs/usr --with-host-libstdcxx='-static-libgcc -Wl,-Bstatic,-lstdc++,-Bdynamic -lm' --with-pkgversion='GNU Tools for Arm Embedded Processors 8-2019-q3-update' --with-multilib-list=rmprofile
Thread model: single
gcc version 8.3.1 20190703 (release) [gcc-8-branch revision 273027] (GNU Tools for Arm Embedded Processors 8-2019-q3-update)
C906 RISC-V 编译器
Using built-in specs.
COLLECT_GCC=./riscv64-unknown-elf-gcc
COLLECT_LTO_WRAPPER=/R128-FreeRTOS/lichee/rtos/tools/riscv64-elf-x86_64-20201104/bin/../libexec/gcc/riscv64-unknown-elf/8.4.0/lto-wrapper
Target: riscv64-unknown-elf
Configured with: /ldhome/software/toolsbuild/slave/workspace/riscv64_build_elf_x86_64/build/../source/riscv/riscv-gcc/configure --target=riscv64-unknown-elf --with-mpc=/ldhome/software/toolsbuild/slave/workspace/riscv64_build_elf_x86_64/lib-for-gcc-x86_64-linux/ --with-mpfr=/ldhome/software/toolsbuild/slave/workspace/riscv64_build_elf_x86_64/lib-for-gcc-x86_64-linux/ --with-gmp=/ldhome/software/toolsbuild/slave/workspace/riscv64_build_elf_x86_64/lib-for-gcc-x86_64-linux/ --prefix=/ldhome/software/toolsbuild/slave/workspace/riscv64_build_elf_x86_64/install --disable-shared --disable-threads --enable-languages=c,c++ --with-system-zlib --enable-tls --enable-libgcctf --with-newlib --with-sysroot=/ldhome/software/toolsbuild/slave/workspace/riscv64_build_elf_x86_64/install/riscv64-unknown-elf --with-native-system-header-dir=/include --disable-libmudflap --disable-libssp --disable-libquadmath --disable-libgomp --disable-nls --src=../../source/riscv/riscv-gcc --with-pkgversion='T-HEAD RISCV Tools V1.10.2 B20201104' --enable-multilib --with-abi=lp64d --with-arch=rv64gcxthead 'CFLAGS_FOR_TARGET=-Os -mcmodel=medany' 'CXXFLAGS_FOR_TARGET=-Os -mcmodel=medany' CC=gcc CXX=g++
Thread model: single
gcc version 8.4.0 (T-HEAD RISCV Tools V1.10.2 B20201104)

![[Linux] Haproxy负载均衡集群](https://img-blog.csdnimg.cn/direct/a958ebbb709d4df8b542e9153e9dc257.png)