解决报错
https://zhuanlan.zhihu.com/p/622238031
原理:https://zhuanlan.zhihu.com/p/612854566
解决内存溢出问题
溢出问题
- 总结下来:batch_size 和 n_samples 调节
原理学习
扩散模型是一种生成模型,用于生成与训练数据相似的数据。简单的说,扩散模型的工作方式是通过迭代添加高斯噪声来“破坏”训练数据,然后学习如何消除噪声来恢复数据。
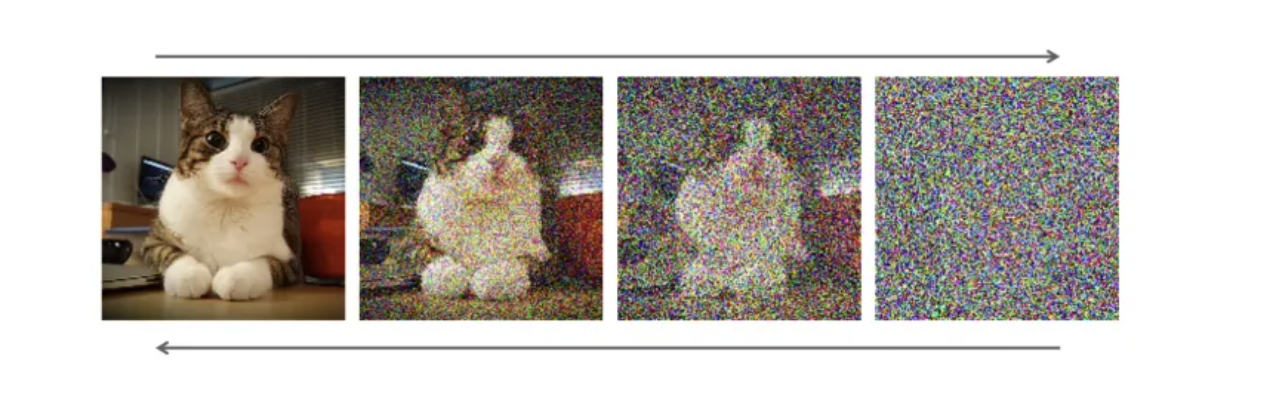
一个标准扩散模型有两个主要过程:正向扩散和反向扩散
-
在正向扩散阶段,通过逐渐引入噪声来破坏图像,直到图像变成完全随机的噪声。
-
在反向扩散阶段,使用一系列马尔可夫链逐步去除预测噪声,从高斯噪声中恢复数据
-
U-Net的特点在于它能够将图像作为入口,并通过减少采样来找到该图像的低维表示,这使得它更适合处理和查找重要属性,然后通过增加采样将图像恢复回来。
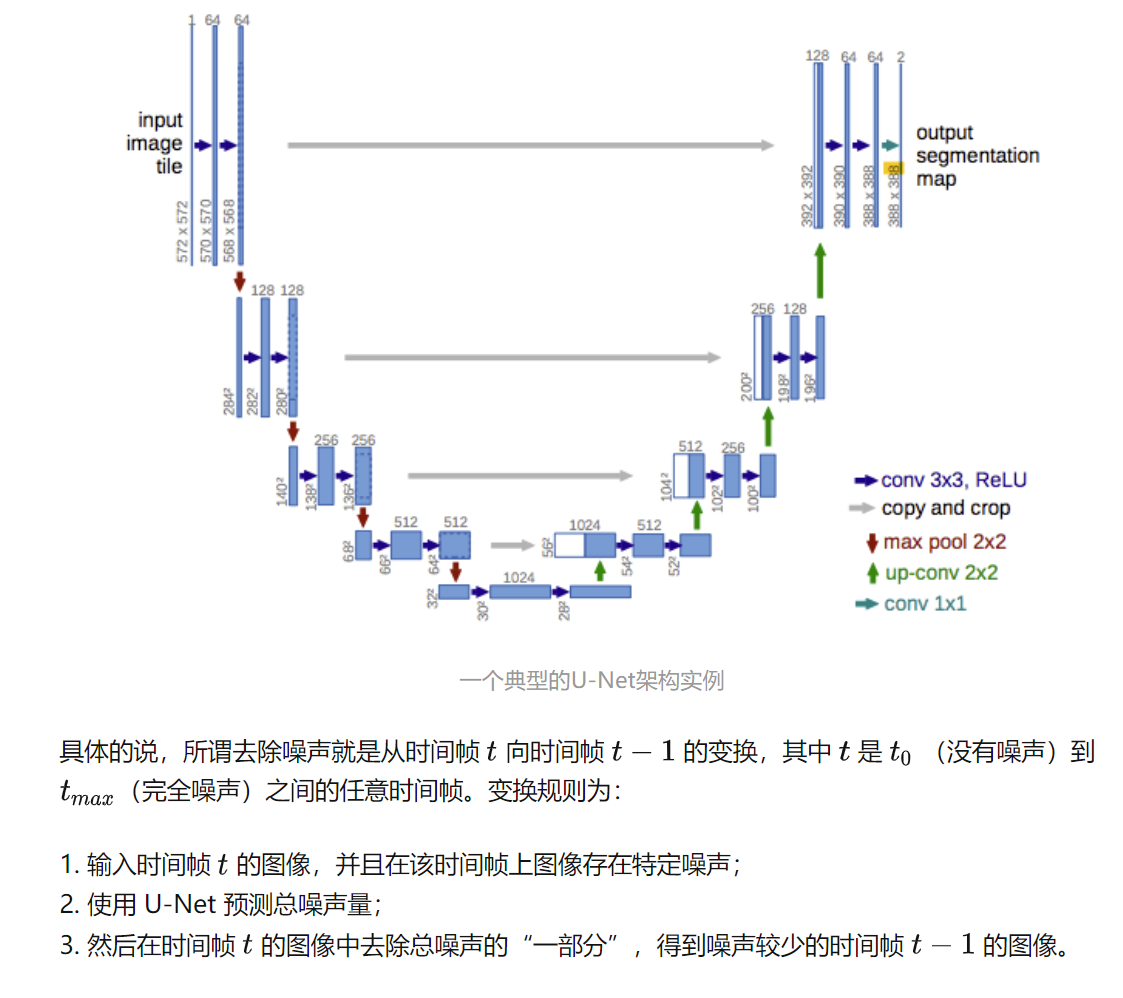
从数学上讲,执行此上述方法T次比尝试消除整个噪声更有意义。通过重复这个过程,噪声会逐渐被去除,我们会得到一个更“干净”的图像。比如对于带有噪声的图,我们通过在初始图像上添加完全噪声,然后再迭代地去除它来生成没有噪声的图像,效果比直接在原图上去除噪声要好。
问题
存在的问题:
然而,实现扩散模型存在一些困难。因为所有马尔可夫状态都需要一直在内存中进行预测,这意味着内存中要一直保存多个大型深度网络的实例,从而导致扩散模型非常吃内存。此外,扩散模型可能会陷入图像数据中难以察觉的细粒度复杂性中,导致训练时间变得太长(几天到几个月)。矛盾的是,细粒度图像生成是扩散模型的主要优势之一,我们无法避免这个“甜蜜的烦恼”。由于扩散模型对计算要求非常高,训练需要非常大的内存和电量,这使得早前大多数研究人员无法在现实中实现该模型。
解决问题:
扩散模型最大的问题是它的时间成本和经济成本都极其“昂贵”。Stable Diffusion的出现就是为了解决上述问题。如果我们想要生成一张 1024x1024尺寸的图像,U-Net 会使用 1024x1024尺寸的噪声,然后从中生成图像。这里做一步扩散的计算量就很大,更别说要循环迭代多次直到100%。一个解决方法是将大图片拆分为若干小分辨率的图片进行训练,然后再使用一个额外的神经网络来产生更大分辨率的图像(超分辨率扩散)
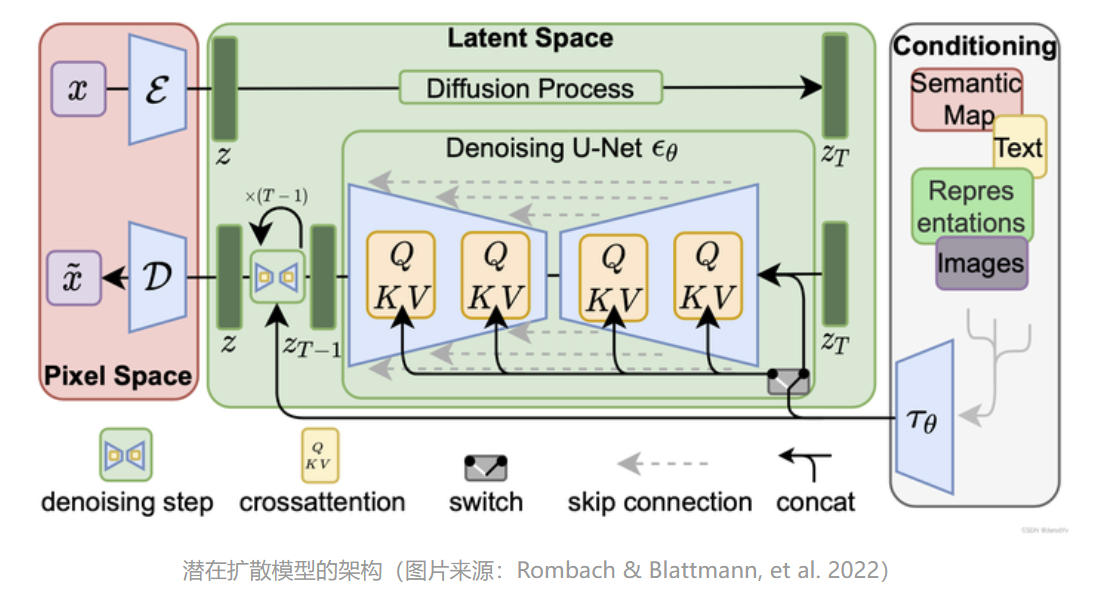
2021年发布的Latent Diffusion模型给出了不一样的方法。 Latent Diffusion模型不直接在操作图像,而是在潜在空间中进行操作。通过将原始数据编码到更小的空间中,让U-Net可以在低维表示上添加和删除噪声。
Latent Diffusion
“潜在扩散模型”(Latent Diffusion Model)将GAN的感知能力、扩散模型的细节保存能力和Transformer的语义能力三者结合,创造出比上述所有模型更稳健和高效的生成模型。与其他方法相比,Latent Diffusion不仅节省了内存,而且生成的图像保持了多样性和高细节度,同时图像还保留了数据的语义结构。
任何生成性学习方法都有两个主要阶段:感知压缩和语义压缩。
感知压缩
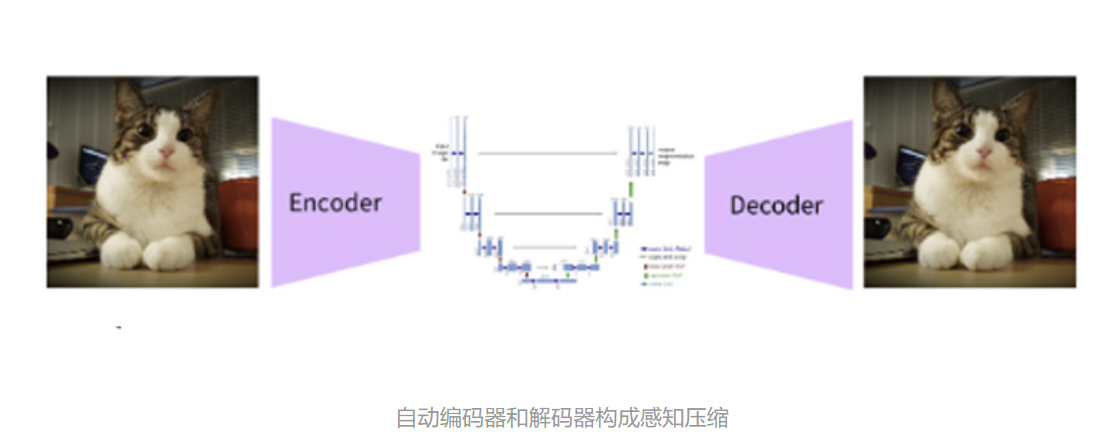
在感知压缩学习阶段,学习方法必须去除高频细节将数据封装到抽象表示中。此步骤对构建一个稳定、鲁棒的环境表示是必要的。GAN 擅长感知压缩,通过将高维冗余数据从像素空间投影到潜在空间的超空间来实现这一点。潜在空间中的潜在向量是原始像素图像的压缩形式,可以有效地代替原始图像。
更具体地说,用自动编码器 (Auto Encoder) 结构捕获感知压缩。 自动编码器中的编码器将高维数据投影到潜在空间,解码器从潜在空间恢复图像。
语义压缩
在学习的第二阶段,图像生成方法必须能够捕获数据中存在的语义结构。 这种概念和语义结构提供了图像中各种对象的上下文和相互关系的保存。 Transformer擅长捕捉文本和图像中的语义结构。 Transformer的泛化能力和扩散模型的细节保存能力相结合,提供了两全其美的方法,并提供了一种生成细粒度的高度细节图像的方法,同时保留图像中的语义结构。
感知损失
潜在扩散模型中的自动编码器通过将数据投影到潜在空间来捕获数据的感知结构。论文作者使用一种特殊的损失函数来训练这种称为“感知损失”的自动编码器。该损失函数确保重建限制在图像流形内,并减少使用像素空间损失(例如 L1/L2 损失)时出现的模糊。
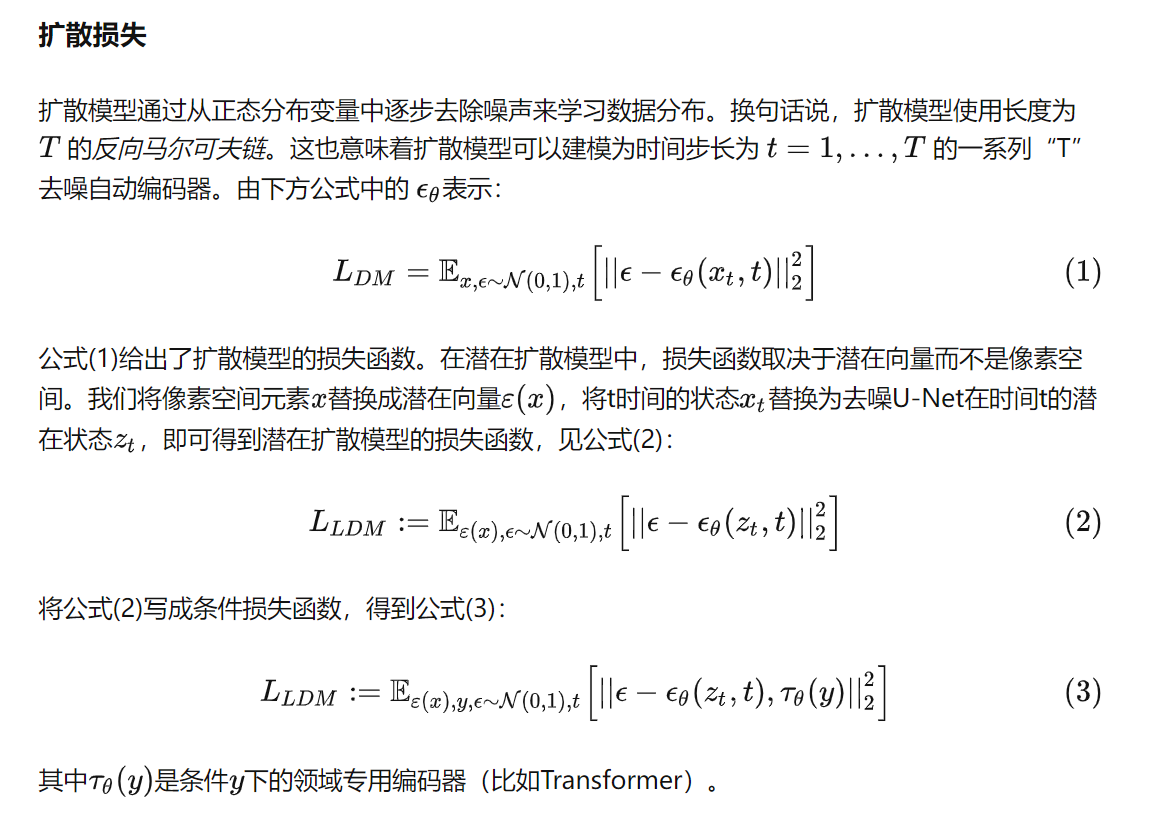
条件扩散
扩散模型是依赖于先验的条件模型。在图像生成任务中,先验通常是文本、图像或语义图。为了获得先验的潜在表示,需要使用转换器(例如 CLIP)将文本/图像嵌入到潜在向量
中。因此,最终的损失函数不仅取决于原始图像的潜在空间,还取决于条件的潜在嵌入。
整体架构:
CLIP
Open AI在2021年1月份发布的DALL-E和CLIP,这两个都属于结合图像和文本的多模态模型,其中DALL-E是基于文本来生成模型的模型,而CLIP是用文本作为监督信号来训练可迁移的视觉模型,这两个工作也像ViT一样带动了一波新的研究高潮。
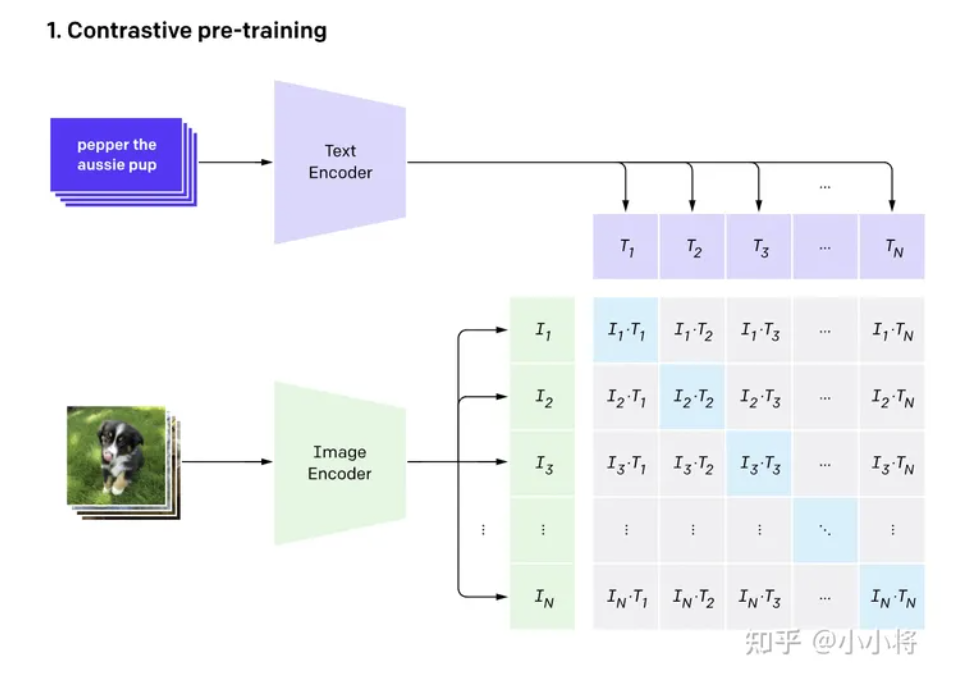
CLIP的英文全称是Contrastive Language-Image Pre-training,即一种基于对比文本-图像对的预训练方法或者模型。
CLIP的训练数据是文本-图像对:一张图像和它对应的文本描述,这里希望通过对比学习,模型能够学习到文本-图像对的匹配关系。如下图所示,CLIP包括两个模型:Text Encoder和Image Encoder,其中Text Encoder用来提取文本的特征,可以采用NLP中常用的text transformer模型;而Image Encoder用来提取图像的特征,可以采用常用CNN模型或者vision transformer。
- 可以看到,我们是利用CLIP的多模态特性为具体的任务构建了动态的分类器,其中Text Encoder提取的文本特征可以看成分类器的weights,而Image Encoder提取的图像特征是分类器的输入。
# image_encoder - ResNet or Vision Transformer
# text_encoder - CBOW or Text Transformer
# I[n, h, w, c] - minibatch of aligned images
# T[n, l] - minibatch of aligned texts
# W_i[d_i, d_e] - learned proj of image to embed
# W_t[d_t, d_e] - learned proj of text to embed
# t - learned temperature parameter# 分别提取图像特征和文本特征
I_f = image_encoder(I) #[n, d_i]
T_f = text_encoder(T) #[n, d_t]# 对两个特征进行线性投射,得到相同维度的特征,并进行l2归一化
I_e = l2_normalize(np.dot(I_f, W_i), axis=1)
T_e = l2_normalize(np.dot(T_f, W_t), axis=1)# 计算缩放的余弦相似度:[n, n]
logits = np.dot(I_e, T_e.T) * np.exp(t)# 对称的对比学习损失:等价于N个类别的cross_entropy_loss
labels = np.arange(n) # 对角线元素的labels
loss_i = cross_entropy_loss(logits, labels, axis=0)
loss_t = cross_entropy_loss(logits, labels, axis=1)
loss = (loss_i + loss_t)/2
前面介绍了CLIP的原理和应用,这里我们再回过头来看另外一个问题:为什么是CLIP,即CLIP这篇工作的motivation。
在计算机视觉领域,最常采用的迁移学习方式就是先在一个较大规模的数据集如ImageNet上预训练,然后在具体的下游任务上再进行微调。这里的预训练是基于有监督训练的,需要大量的数据标注,因此成本较高。
近年来,出现了一些基于自监督的方法,这包括基于对比学习的方法如MoCo和SimCLR,和基于图像掩码的方法如MAE和BeiT,自监督方法的好处是不再需要标注。
但是无论是有监督还是自监督方法,它们在迁移到下游任务时,还是需要进行有监督微调,而无法实现zero-shot。
-
对于有监督模型,由于它们在预训练数据集上采用固定类别数的分类器,所以在新的数据集上需要定义新的分类器来重新训练。
-
对于自监督模型,代理任务往往是辅助来进行表征学习,在迁移到其它数据集时也需要加上新的分类器来进行有监督训练。
-
但是NLP领域,基于自回归或者语言掩码的预训练方法已经取得相对成熟,而且预训练模型很容易直接zero-shot迁移到下游任务,比如OpenAI的GPT-3。这种差异一方面是由于文本和图像属于两个完全不同的模态,另外一个原因就是NLP模型可以采用从互联网上收集的大量文本。