参考自
- up主的b站链接:霹雳吧啦Wz的个人空间-霹雳吧啦Wz个人主页-哔哩哔哩视频
- 这位大佬的博客 Fun'_机器学习,pytorch图像分类,工具箱-CSDN博客
1. GoogLeNet网络详解
GoogLeNet在2014年由Google团队提出(与VGG网络同年,注意GoogLeNet中的L大写是为了致敬LeNet),斩获当年ImageNet竞赛中Classification Task (分类任务) 第一名。
原论文地址:深度学习面试题20:GoogLeNet(Inception V1) - 黎明程序员 - 博客园 (cnblogs.com)
GoogLeNet 的创新点:
1.引入了 Inception 结构(融合不同尺度的特征信息)
2.使用1x1的卷积核进行降维以及映射处理 (虽然VGG网络中也有,但该论文介绍的更详细)
3.添加两个辅助分类器帮助训练
4.丢弃全连接层,使用平均池化层(大大减少模型参数,除去两个辅助分类器,网络大小只有vgg的1/20)
inception 结构
传统的CNN结构如AlexNet、VggNet(下图)都是串联的结构,即将一系列的卷积层和池化层进行串联得到的结构

这里GoogleNet提出了并联的思路
将特征矩阵同时输入到多个分支进行处理,并将输出的特征矩阵按深度进行拼接,得到最终输出
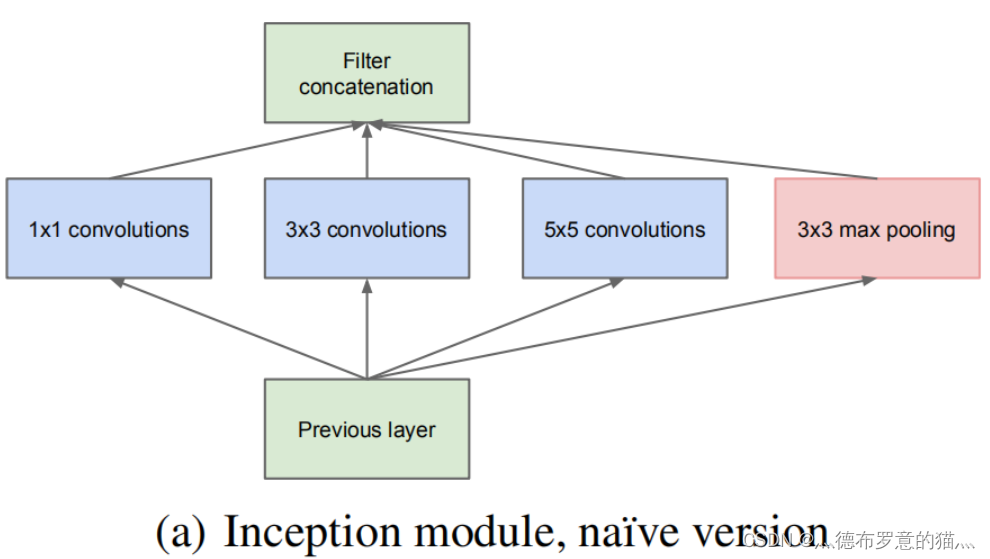
inception的作用:增加网络深度和宽度的同时减少参数
在 inception 的基础上,还可以加上降维功能的结构,如下图所示,在原始 inception 结构的基础上,在分支2,3,4上加入了卷积核大小为1x1的卷积层,目的是为了降维(减小深度),减少模型训练参数,减少计算量。

1×1卷积核的降维功能
同样是对一个深度为512的特征矩阵使用64个大小为5x5的卷积核进行卷积,不使用1x1卷积核进行降维的 话一共需要819200个参数,如果使用1x1卷积核进行降维一共需要50688个参数,明显少了很多。

辅助分类器(Auxiliary Classifier)
AlexNet 和 VGG 都只有1个输出层,GoogLeNet 有3个输出层,其中的两个是辅助分类层。
如下图所示,网络主干右边的 两个分支 就是 辅助分类器,其结构一模一样。
在训练模型时,将两个辅助分类器的损失乘以权重(论文中是0.3)加到网络的整体损失上,再进行反向传播。
辅助分类器的作用:
作用一:可以把他看做inception网络中的一个小细节,它确保了即便是隐藏单元和中间层也参与了特征计算,他们也能预测图片的类别,他在inception网络中起到一种调整的效果,并且能防止网络发生过拟合。
作用二:给定深度相对较大的网络,有效传播梯度反向通过所有层的能力是一个问题。通过将辅助分类器添加到这些中间层,可以期望较低阶段分类器的判别力。在训练期间,它们的损失以折扣权重(辅助分类器损失的权重是0.3)加到网络的整个损失上。

GoogLeNet 网络参数

pytorch搭建GoogLeNet
相比于 AlexNet 和 VggNet 只有卷积层和全连接层这两种结构,GoogLeNet多了 inception 和 辅助分类器(Auxiliary Classifier),而 inception 和 辅助分类器 也是由多个卷积层和全连接层组合的,因此在定义模型时可以将 卷积、inception 、辅助分类器定义成不同的类,调用时更加方便。
import torch.nn as nn
import torch
import torch.nn.functional as Fclass GoogLeNet(nn.Module):# 传入的参数中aux_logits=True表示训练过程用到辅助分类器,aux_logits=False表示验证过程不用辅助分类器def __init__(self, num_classes=1000, aux_logits=True, init_weights=False):super(GoogLeNet, self).__init__()self.aux_logits = aux_logitsself.conv1 = BasicConv2d(3, 64, kernel_size=7, stride=2, padding=3)self.maxpool1 = nn.MaxPool2d(3, stride=2, ceil_mode=True)self.conv2 = BasicConv2d(64, 64, kernel_size=1)self.conv3 = BasicConv2d(64, 192, kernel_size=3, padding=1)self.maxpool2 = nn.MaxPool2d(3, stride=2, ceil_mode=True)self.inception3a = Inception(192, 64, 96, 128, 16, 32, 32)self.inception3b = Inception(256, 128, 128, 192, 32, 96, 64)self.maxpool3 = nn.MaxPool2d(3, stride=2, ceil_mode=True)self.inception4a = Inception(480, 192, 96, 208, 16, 48, 64)self.inception4b = Inception(512, 160, 112, 224, 24, 64, 64)self.inception4c = Inception(512, 128, 128, 256, 24, 64, 64)self.inception4d = Inception(512, 112, 144, 288, 32, 64, 64)self.inception4e = Inception(528, 256, 160, 320, 32, 128, 128)self.maxpool4 = nn.MaxPool2d(3, stride=2, ceil_mode=True)self.inception5a = Inception(832, 256, 160, 320, 32, 128, 128)self.inception5b = Inception(832, 384, 192, 384, 48, 128, 128)if self.aux_logits:self.aux1 = InceptionAux(512, num_classes)self.aux2 = InceptionAux(528, num_classes)self.avgpool = nn.AdaptiveAvgPool2d((1, 1))self.dropout = nn.Dropout(0.4)self.fc = nn.Linear(1024, num_classes)if init_weights:self._initialize_weights()def forward(self, x):# N x 3 x 224 x 224x = self.conv1(x)# N x 64 x 112 x 112x = self.maxpool1(x)# N x 64 x 56 x 56x = self.conv2(x)# N x 64 x 56 x 56x = self.conv3(x)# N x 192 x 56 x 56x = self.maxpool2(x)# N x 192 x 28 x 28x = self.inception3a(x)# N x 256 x 28 x 28x = self.inception3b(x)# N x 480 x 28 x 28x = self.maxpool3(x)# N x 480 x 14 x 14x = self.inception4a(x)# N x 512 x 14 x 14if self.training and self.aux_logits: # eval model lose this layeraux1 = self.aux1(x)x = self.inception4b(x)# N x 512 x 14 x 14x = self.inception4c(x)# N x 512 x 14 x 14x = self.inception4d(x)# N x 528 x 14 x 14if self.training and self.aux_logits: # eval model lose this layeraux2 = self.aux2(x)x = self.inception4e(x)# N x 832 x 14 x 14x = self.maxpool4(x)# N x 832 x 7 x 7x = self.inception5a(x)# N x 832 x 7 x 7x = self.inception5b(x)# N x 1024 x 7 x 7x = self.avgpool(x)# N x 1024 x 1 x 1x = torch.flatten(x, 1)# N x 1024x = self.dropout(x)x = self.fc(x)# N x 1000 (num_classes)if self.training and self.aux_logits: # eval model lose this layerreturn x, aux2, aux1return xdef _initialize_weights(self):for m in self.modules():if isinstance(m, nn.Conv2d):nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')if m.bias is not None:nn.init.constant_(m.bias, 0)elif isinstance(m, nn.Linear):nn.init.normal_(m.weight, 0, 0.01)nn.init.constant_(m.bias, 0)# Inception结构
class Inception(nn.Module):def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch5x5red, ch5x5, pool_proj):super(Inception, self).__init__()self.branch1 = BasicConv2d(in_channels, ch1x1, kernel_size=1)self.branch2 = nn.Sequential(BasicConv2d(in_channels, ch3x3red, kernel_size=1),BasicConv2d(ch3x3red, ch3x3, kernel_size=3, padding=1) # 保证输出大小等于输入大小)self.branch3 = nn.Sequential(BasicConv2d(in_channels, ch5x5red, kernel_size=1),BasicConv2d(ch5x5red, ch5x5, kernel_size=5, padding=2) # 保证输出大小等于输入大小)self.branch4 = nn.Sequential(nn.MaxPool2d(kernel_size=3, stride=1, padding=1),BasicConv2d(in_channels, pool_proj, kernel_size=1))def forward(self, x):branch1 = self.branch1(x)branch2 = self.branch2(x)branch3 = self.branch3(x)branch4 = self.branch4(x)outputs = [branch1, branch2, branch3, branch4]return torch.cat(outputs, 1) # 按 channel 对四个分支拼接 # 辅助分类器
class InceptionAux(nn.Module):def __init__(self, in_channels, num_classes):super(InceptionAux, self).__init__()self.averagePool = nn.AvgPool2d(kernel_size=5, stride=3)self.conv = BasicConv2d(in_channels, 128, kernel_size=1) # output[batch, 128, 4, 4]self.fc1 = nn.Linear(2048, 1024)self.fc2 = nn.Linear(1024, num_classes)def forward(self, x):# aux1: N x 512 x 14 x 14, aux2: N x 528 x 14 x 14x = self.averagePool(x)# aux1: N x 512 x 4 x 4, aux2: N x 528 x 4 x 4x = self.conv(x)# N x 128 x 4 x 4x = torch.flatten(x, 1)x = F.dropout(x, 0.5, training=self.training)# N x 2048x = F.relu(self.fc1(x), inplace=True)x = F.dropout(x, 0.5, training=self.training)# N x 1024x = self.fc2(x)# N x num_classesreturn x# 基础卷积层(卷积+ReLU)
class BasicConv2d(nn.Module):def __init__(self, in_channels, out_channels, **kwargs):super(BasicConv2d, self).__init__()self.conv = nn.Conv2d(in_channels, out_channels, **kwargs)self.relu = nn.ReLU(inplace=True)def forward(self, x):x = self.conv(x)x = self.relu(x)return x
train.py
实例化网络时的参数
net = GoogLeNet(num_classes=5, aux_logits=True, init_weights=True)
GoogLeNet的网络输出 loss 有三个部分,分别是主干输出loss、两个辅助分类器输出loss(权重0.3)
logits, aux_logits2, aux_logits1 = net(images.to(device))
loss0 = loss_function(logits, labels.to(device))
loss1 = loss_function(aux_logits1, labels.to(device))
loss2 = loss_function(aux_logits2, labels.to(device))
loss = loss0 + loss1 * 0.3 + loss2 * 0.3
predict
# create model
model = GoogLeNet(num_classes=5, aux_logits=False)# load model weights
model_weight_path = "./googleNet.pth"
但是在加载训练好的模型参数时,由于其中是包含有辅助分类器的,需要设置strict=False
missing_keys, unexpected_keys = model.load_state_dict(torch.load(model_weight_path), strict=False)