文章目录
- 环境:
- 1.1 体素化介绍:
- 2.1 python代码
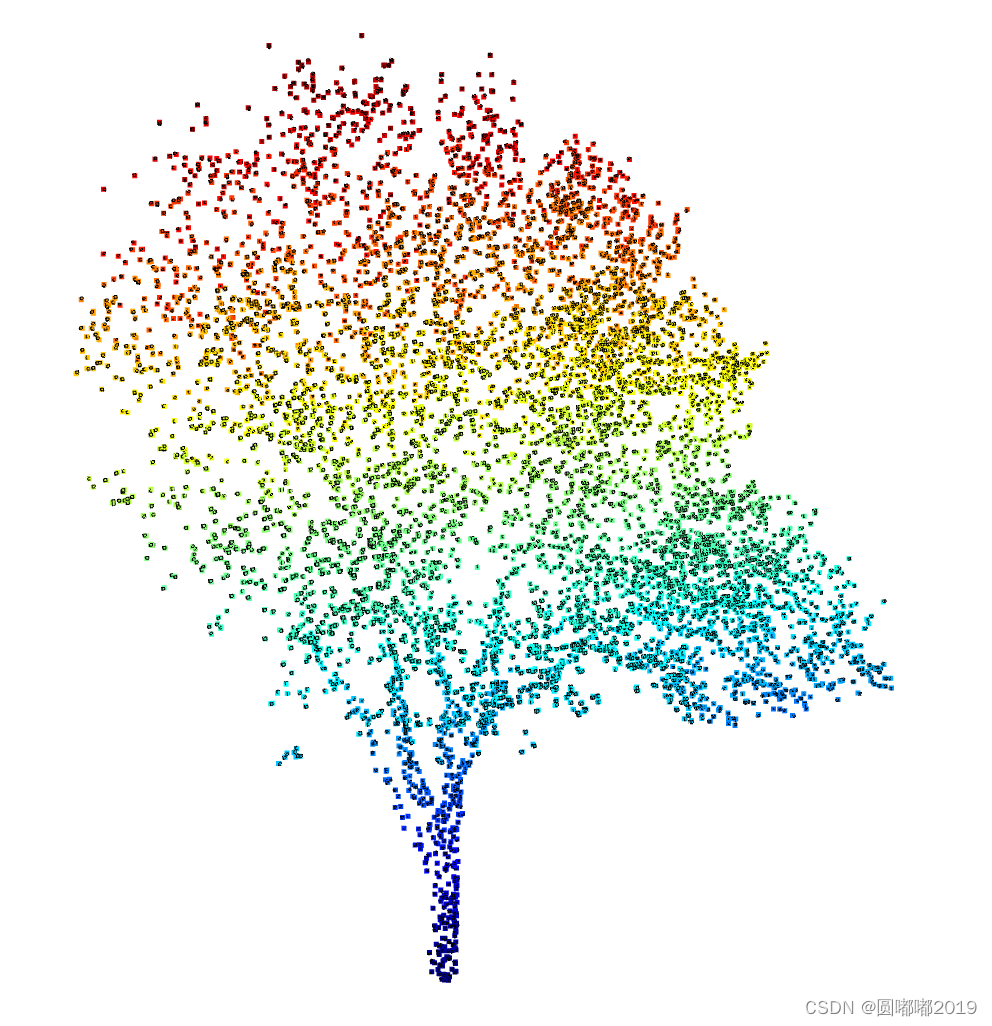
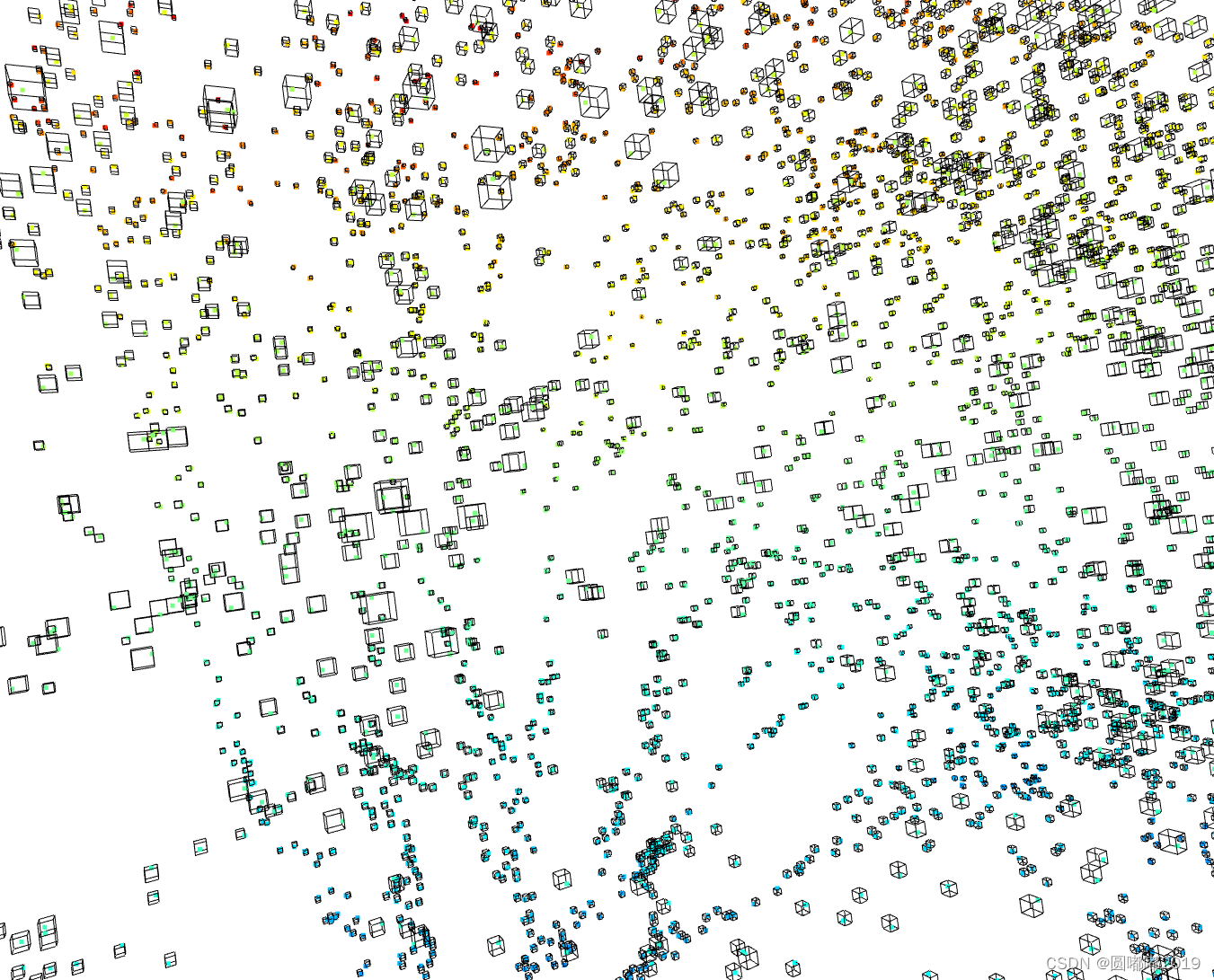
- 3.1 可视化
环境:
Open3D
1.1 体素化介绍:
用一个个小体素去占据点云
2.1 python代码
conda activete deeplabv3plus(环境名称–安装好open3D的)
python demo.py
import open3d as o3d
import numpy as npdef draw_geometries(result, batch=False):if not batch:for i in range(len(result)):o3d.visualization.draw_geometries([result[i]], "result", 800, 600, 50, 50, False, False, True)else:o3d.visualization.draw_geometries(result, "result", 800, 600, 50, 50, False, True, True)def main():result = []# 读取数据pcd = o3d.io.read_point_cloud("downsampled_pcd.pcd") # 替换为您的 .pcd 文件路径# ------------------------------点云体素化处理-------------------------------voxel_grid = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd, voxel_size=0.05)result.append(pcd)result.append(voxel_grid)draw_geometries(result, True)if __name__ == "__main__":main()3.1 可视化