简介
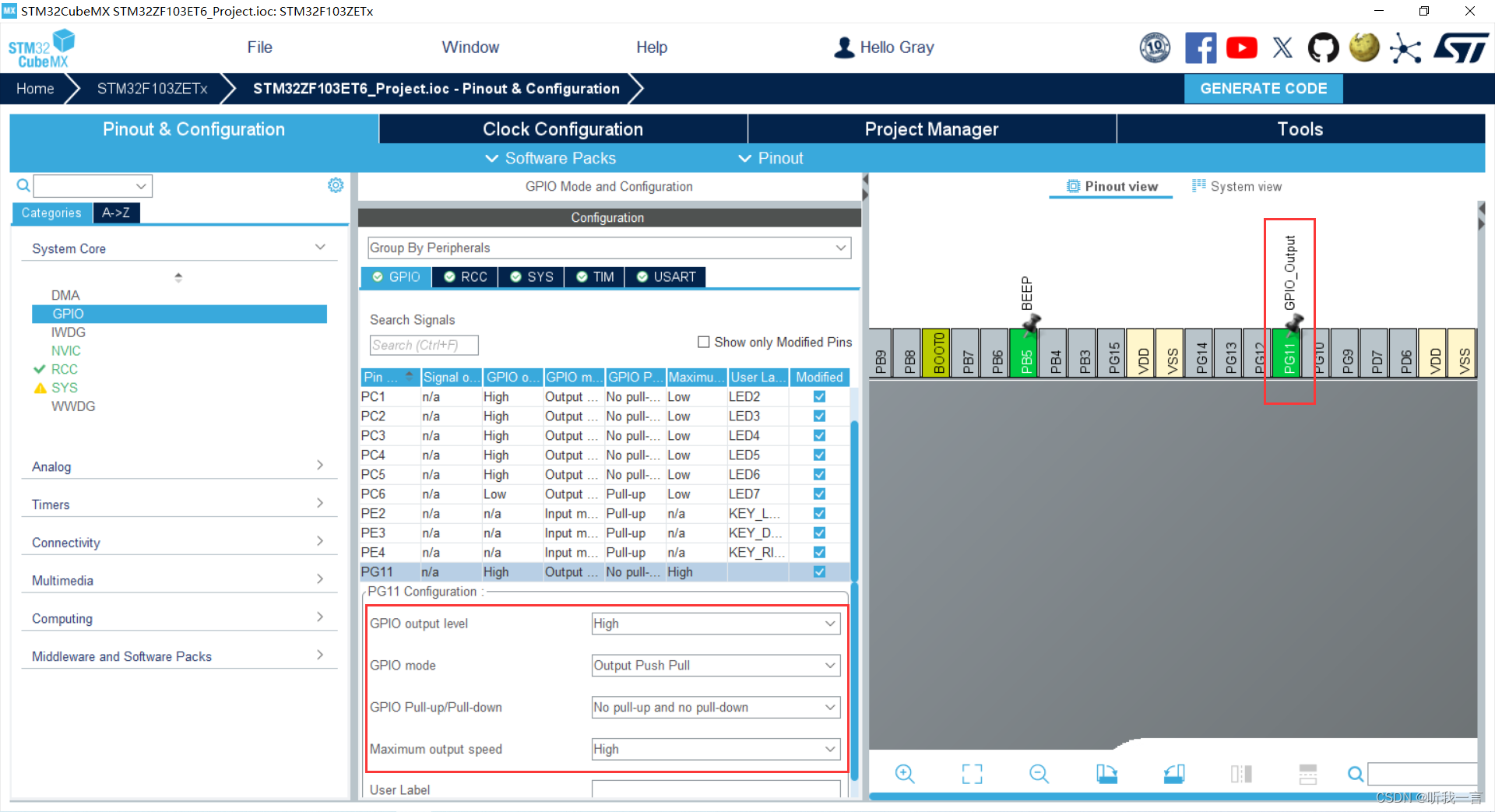
主芯片STM32F103ZET6, 通过引脚PG11 连接DS18B20, 读取DS18B20采集的温度数据;
电路原理图
DS18B20电路图
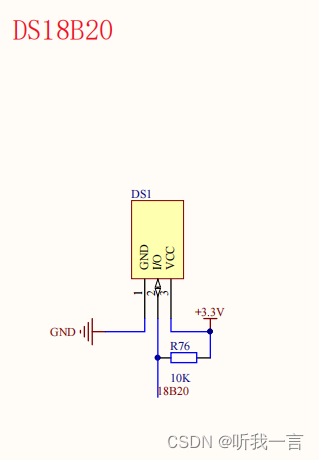
DS18B20 与 主芯片连接引脚

其他知识
DS18B20资料
DS18B20数据手册
DS18B20 简介
单线通讯的温度传感器,
测量温度在-55℃ 到 +125℃,
在-10°C 到 +85°C精度±0.5°C,
9~12bit 可设定分辨率,
默认12bit分辨率,
12bit分辨率下温度转化时间在最长是750ms,
温度值存在DS18B20 ROM中是补码的形式存储, 负值需要 取反 + 1才能得到原码
实现步骤
时序图中设计到的采集数据时有进行us级别的延时, 需要将系统改成us级别或者定义一个TIMER作为us级别的延时器
创建项目
参考 普中STM32-PZ6806L开发板(STM32CubeMX创建项目并点亮LED灯)
TIM2 实现us级别延时
参考 普中STM32-PZ6806L开发板(HAL库函数实现-TIM2实现us延时)
引脚初始化
默认初始化为输出
添加用户代码
引脚输入输出变动代码
引脚涉及到 输入 和 输出, 所以我们需要在代码里面实现输入和输出可以切换的方式, 代码如下
static void SENSOR_DS18B20_SetPinInput(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.Pin = GPIO_Pin;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOx, &GPIO_InitStruct);
}static void SENSOR_DS18B20_SetPinOutput(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.Pin = GPIO_Pin;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;HAL_GPIO_Init(GPIOx, &GPIO_InitStruct);
}初始化时序代码
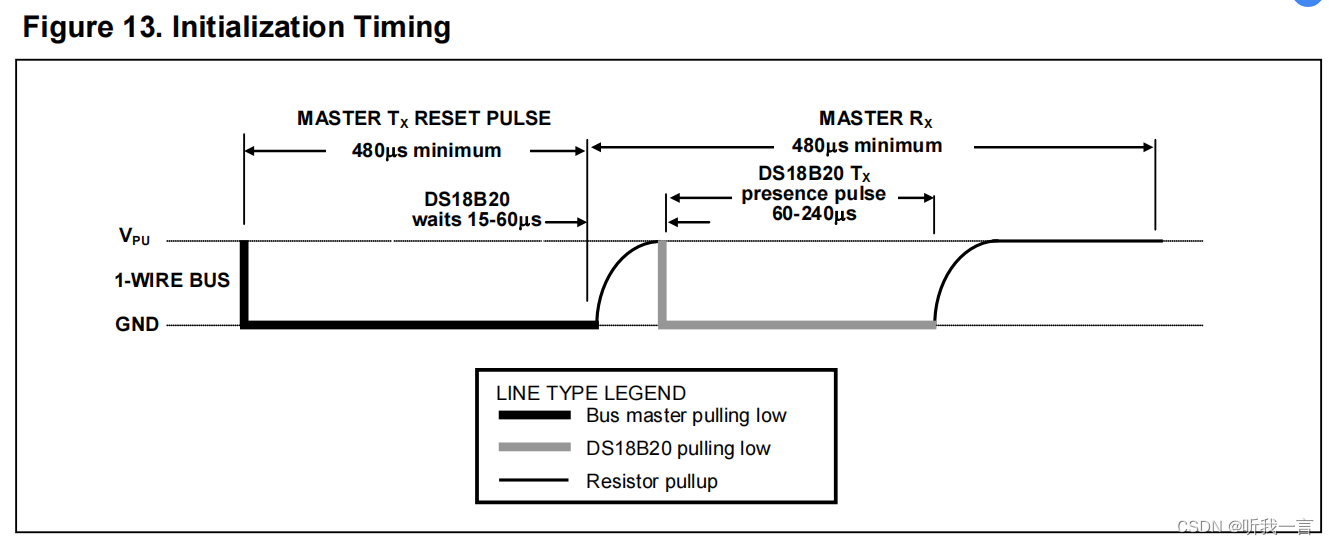
/*SENSOR_DS18B20_Reset :初始化,也是复位, 每次发送指令前的动作0 : 初始化失败1 : 初始化成功
*/
static uint8_t SENSOR_DS18B20_Reset(void)
{uint8_t res = 0;SENSOR_DS18B20_SetPinOutput(DS18B20_PORT, DS18B20_PIN); // 引脚输出模式HAL_GPIO_WritePin (DS18B20_PORT, DS18B20_PIN, 0); // 拉低引脚delay_us (480); // 参考初始化时序图, 延时480usSENSOR_DS18B20_SetPinInput(DS18B20_PORT, DS18B20_PIN); // set the pin as inputdelay_us (60); // 15~60us等待DS18B20回复信息, 多等20us避免检测不到if ( !HAL_GPIO_ReadPin(DS18B20_PORT, DS18B20_PIN) )res = 1; // 检测到低电平, DS18B20有响应else res = 0;delay_us (420); // 等待DS18B20结束响应return res;
}读写时序代码
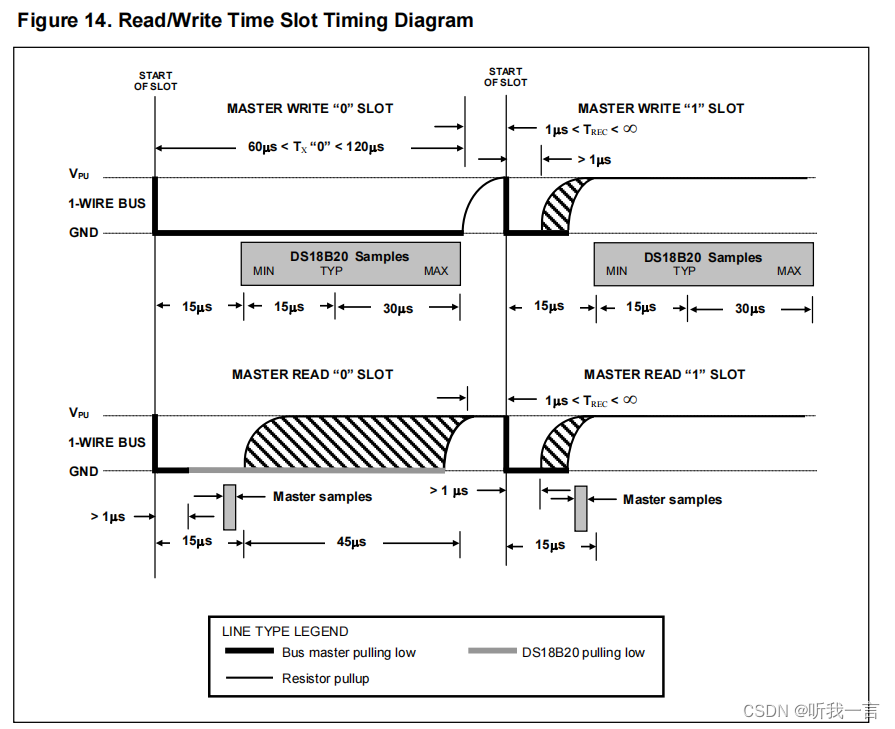
void SENSOR_DS18B20_Write(uint8_t data)
{/*按位写, 根据时序图, 按照写的 高电平的时序 和 低电平的时序进行延时*/for (int i = 0; i < 8; ++i){if ((data & (1<<i))!=0) // 写1{SENSOR_DS18B20_SetPinOutput(DS18B20_PORT, DS18B20_PIN); HAL_GPIO_WritePin(DS18B20_PORT, DS18B20_PIN, 0); // 拉低delay_us (2); // 低电平保持时间SENSOR_DS18B20_SetPinInput(DS18B20_PORT, DS18B20_PIN); // 输入delay_us (60); // 等待}else // 写0{SENSOR_DS18B20_SetPinOutput(DS18B20_PORT, DS18B20_PIN);HAL_GPIO_WritePin (DS18B20_PORT, DS18B20_PIN, 0); // 拉低delay_us (60); // 等待60usSENSOR_DS18B20_SetPinInput(DS18B20_PORT, DS18B20_PIN); // 输入}}
}uint8_t SENSOR_DS18B20_Read (void)
{uint8_t value = 0;for (int i=0;i<8;i++){SENSOR_DS18B20_SetPinOutput(DS18B20_PORT, DS18B20_PIN);HAL_GPIO_WritePin(DS18B20_PORT, DS18B20_PIN, 0); // 拉低delay_us(2); // 拉低电平等待时间SENSOR_DS18B20_SetPinInput(DS18B20_PORT, DS18B20_PIN);if (HAL_GPIO_ReadPin (DS18B20_PORT, DS18B20_PIN)) {value |= 1<<i; }delay_us (60); // DS18B20数据响应时间}return value;
}获取温度值
float SENSOR_DS18B20_GetTemperature(void)
{uint8_t lsb_byte, msb_byte;uint16_t temp = 0;float value = 0.0;SENSOR_DS18B20_Reset ();HAL_Delay (1);SENSOR_DS18B20_Write (0xCC); // skip ROMSENSOR_DS18B20_Write (0x44); // convert tHAL_Delay (800); // 12bit分辨率最长转换时间750msSENSOR_DS18B20_Reset ();HAL_Delay (1);SENSOR_DS18B20_Write (0xCC); // skip ROMSENSOR_DS18B20_Write (0xBE); // 读值指令lsb_byte = SENSOR_DS18B20_Read(); // LSBmsb_byte = SENSOR_DS18B20_Read(); // MSBtemp = msb_byte;temp = (temp<<8) + lsb_byte; // 合并if((temp&0xf800)==0xf800) // 符号位判定是否负数{temp=(~temp)+1; // 补码转原码value=temp*(-0.0625); //12bit 增量值}else{value=temp*0.0625; //12bit 增量值}return value;
}main.c
int main()
{
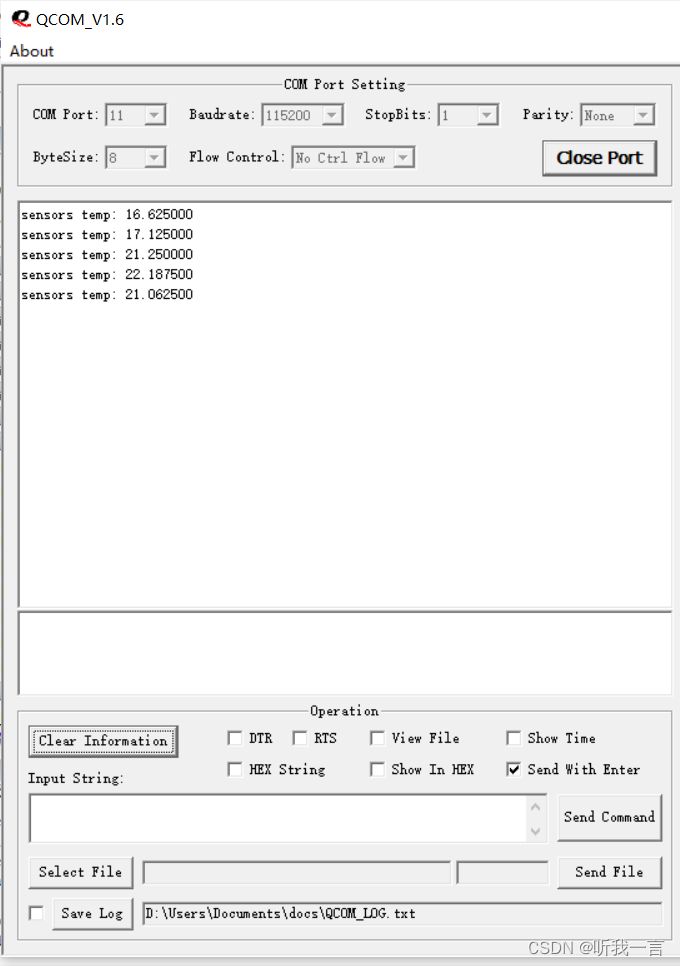
...while (1){printf("sensors temp: %f\r\n", SENSOR_DS18B20_GetTemperature());HAL_Delay(2000);}
...
}
共赏
代码
不需要下载, 基本代码上面都提供了
参考
普中STM32-PZ6806L开发板(HAL库函数实现-批量操作GPIO引脚实现跑马灯)
结语
在网上看到一种利用串口单线半双工原理读取数据 的, 也是很有意思(未试验过)。。。