注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等 注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等 注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等 roslaunch robot_bringup 2Dlidar_location. launch
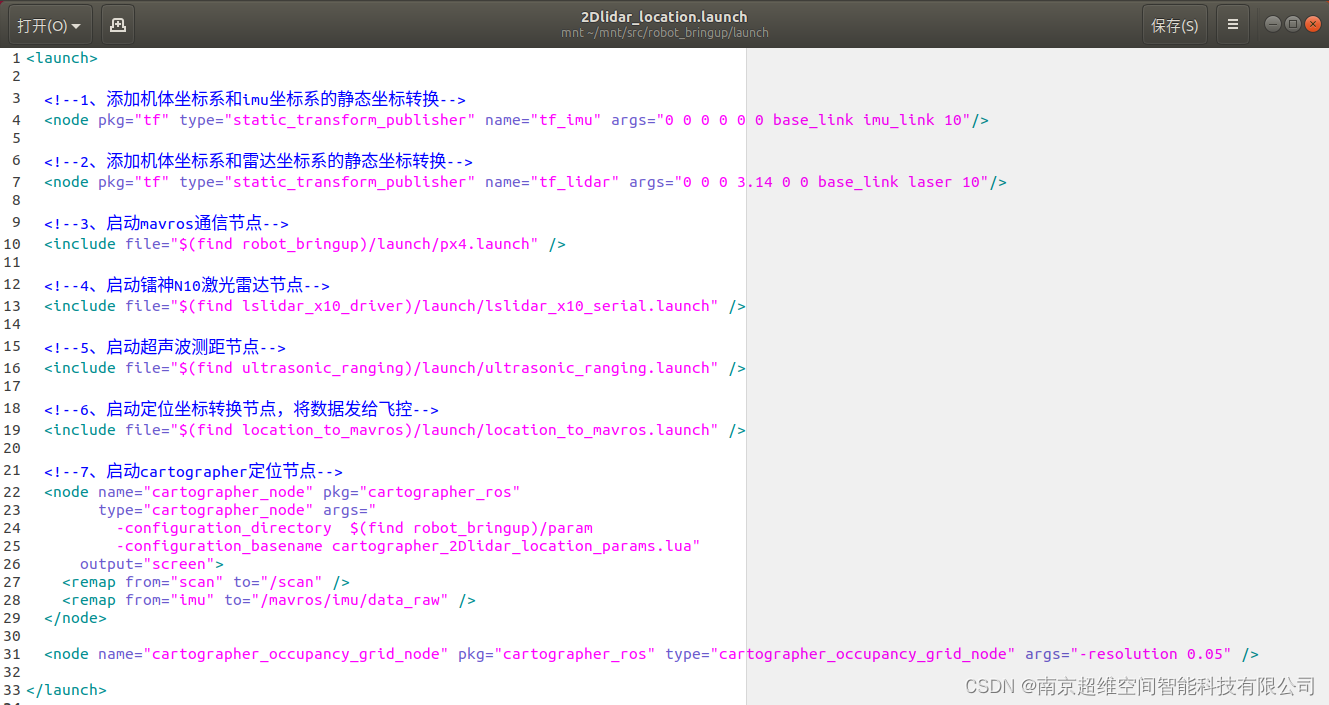
1 、添加机体坐标系和imu坐标系的静态坐标转换
2 、添加机体坐标系和雷达坐标系的静态坐标转换
3 、启动mavros通信节点
4 、启动镭神N10 激光雷达节点
5 、启动超声波测距节点
6 、启动定位坐标转换节点,将数据发给飞控
7 、启动cartographer定位节点
后续补充