目录
一、设想功能描述
想法缘起
目标功能
二、问题抽象
三、算法设计和优化
1. 易想的朴素搜索 / dp
搜索想法
动态规划(dp)想法
2. 思考与优化
四、算法实现
五、结果示例
附:使用的地图API
一、设想功能描述
想法缘起
-
OSM 导出的地图数据中有 “amenity”(便民设施)点,并在
<tag k="amenity" v="..."/>中标记了每个 amenity 的具体类型,比如:fast_food,pub,toilets……
-
而人们在路途或旅途中,常常关注最近的某种类型(常为 amenity,如卫生间、停车车场)的最近处,而尚未明确目的地。从而容易想到去设计一个扩展功能:给定 amenity,查询距离当前点最近的该类的点。显然,这个问题仍用 Dijkstra 求单源最短路即可。
-
然而,有时人们想连续去多个便民点,比如:先去停车场停车再去吃饭,最后逛逛周边的公园等等。为了提高效率与体验,很可能需要一个总路程最短的方案,这就是该 “扩展功能” 考虑的问题。
目标功能
★ 用户给定当前位置,并指定一个 amenity 种类的顺序。求出最短路线,并呈现在地图上。

二、问题抽象
地图上有某些点带有颜色。给出起点 s 与颜色序列 ,尽可能快地求出一条以 s 为起点的最短路线
,要求其依次经过颜色为
的点。
存在数据约束与特征:,其中
为
颜色点集,此外,各种颜色的点大致均匀分布。

三、算法设计和优化
1. 易想的朴素搜索 / dp
搜索想法
直接以每个 为阶段,进行深度优先搜索(DFS),这部分时间复杂度已经有
,虽然可以进行剪枝,即当前搜素的长度
cur 超过搜到的最短长度 res,就直接 return,但光这样时间复杂度不变的。
动态规划(dp)想法
以每个 为阶段设计 dp,易得状态转移方程类似如下形式:
然而,显然其时间复杂度是同搜索的,而且还很难剪枝,所以比搜索更差。
此外,还要计算中间相邻颜色两点的最短路,从而全求出来的时间复杂度应比上面更大,空间复杂度亦大。
2. 思考与优化
直观地,最终答案的路线几乎不可能 “兜得很远”,这启发我们优化搜索顺序。对于每个 ,我们考虑先走到离最近的
搜索下去,回溯后再搜次近的
……可以想象这样搜出来的前几条路已经得到或较接近最终答案。进一步来看,又因为各种颜色的点大致均匀分布,所以这样的剪枝效果一定是非常显著的。
不过,如何求出搜 的顺序?其实我们完全不必先预处理出最短路然后排序。注意到 Dijkstra 的最短路算法就是按照距离由到达的顺序得到 “确定点” 的。所以,我们把 Dijkstra 算法 “嵌入” 搜索框架之中,从当前
做 Dijkstra,遍历到一个下一颜色的
,我们就从
递归进行搜索。这样相当于又解决了花大代价计算最短路的问题。

总之,本问题基于搜索的大框架,而其内部融入 Dijkstra,每个结点处的下一个点通过 Dijkstra 确定,当前搜索路上的每个点都保留了一个 Dijkstra 状态。
四、算法实现
关键在于构建搜索的代码,尤其是解决 “每一层” 都在做 Dijkstra 带来的问题。
原始 Dijkstra 只有一个答案数组 d[MAXN] ,这里我们显然需要多个,不过我们若开 n 个这样的数组,内存开销较大,且可能不易扩展。注意到 {d[u], u} 保留在原始 Dijkstra 的 std::priority_queue 中,我们可以用 std::set 代替这个 std::priority_queue,既可以取出最小值,又存下来当前有用的 {d[u], u} 且能 std::find 得到 {d[v], v},而 vis 数组可用 std::unordered_set 代替。
这样,我们相当于仅在搜索路上开 C++ 的容器,空间开销显著减小而并未增大过多增加时间常数,且易于扩展。
void DFS(int s, int x, double cur) {if (x == Ord.size()) { // ... }set<pair<double, int>> d; d.insert({0.0, s});unordered_set<int> vis;while (d.size()) {int u = d.begin()->second;double dis = d.begin()->first;if (cur + dis > ans) return;
d.erase(d.begin());if (vis.find(u) != vis.end()) continue;vis.insert(u);auto itt = M.p[u].Ames.find(Ord[x]);if (itt != M.p[u].Ames.end()) {curOrd.push_back(u);DFS(u, x+1, cur+dis);curOrd.pop_back();}
for (int e = M.head[u]; e; e = M.nxt[e]) {// ...auto it = d.upper_bound({-1.0, v});if (it==d.end() || it->second!=v || dis+w<it->first) d.insert({dis+w, v});}}
}五、结果示例
-
n=6:起点在徐家汇一带,(较为随意地)指定下面 6 个 Amenity Type 的顺序:
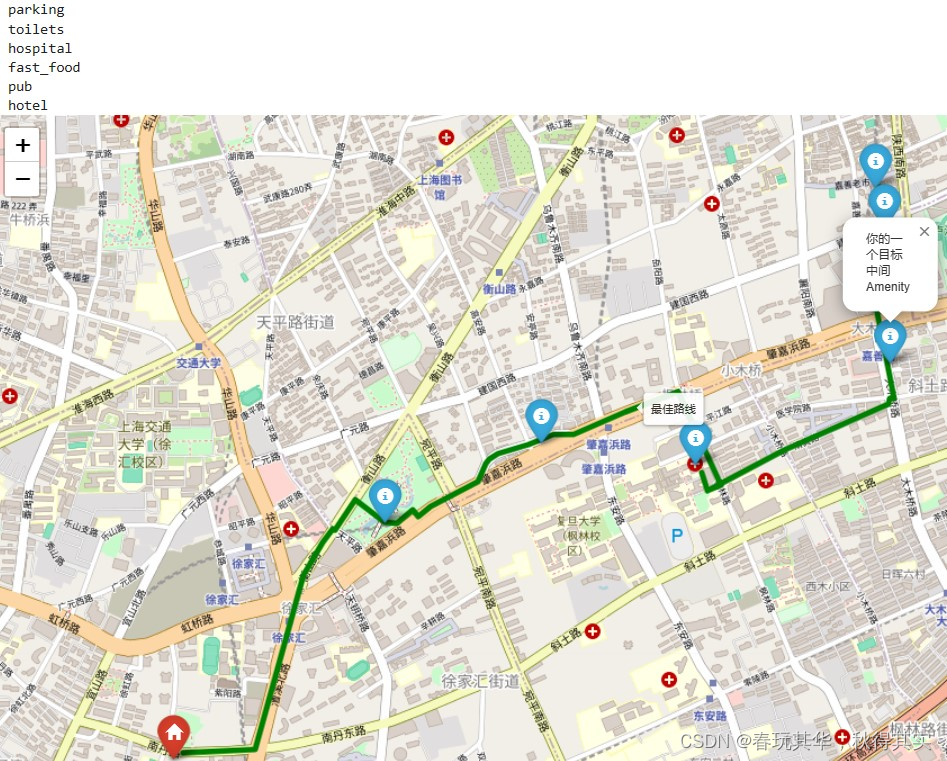
附:使用的地图API
基于 Leaflet.js 库的 Python 交互式地图包 Folium