提醒:本文的代码Demo中使用的是,单通道捕捉采集PWM输入信号的频率+占空比。
在上一篇博客中已经讲解了过PWM输出配置,本文主要讲解TIM输入捕获配置。STM32标准库+HAL库 | 高精度动态调节PWM输出频率+占空比_hal库改变pwm频率-CSDN博客
目录
1、TIM输入捕获基础
2、HAL库版TIM输入捕获
3、标准库版TIM输入捕获
1、TIM输入捕获基础
在众多的仪器仪表类产品如示波器、逻辑分析仪,医疗设备、智能手表及工业控制的电机设备开发中,经常需要测量PWM输入波形的频率及占空比或TIM定时器脉冲计数值等数据。因此掌握TIM输入捕获是在各个行业从事嵌入式开发的一项非常基本的技能。当然,在一些大学生的省级、国家级的电子综合设计竞赛中,也经常考察对TIM、PWM的配置使用,由此可见掌握TIM-PWM的重要性。
随着ST公司推出了越来越多的新款芯片并没有配套的标准库,并且目前在各大平台没有前辈对TIM输入捕获将两个库同时进行讲解。因此本文以STM32为例,对STM32的标准库和HAL库输入捕获功能进行讲解。标准库使用STM32F407进行输入捕获测试,HAL库使用STM32G4进行输入捕获测试。STM32G4官方没有推出对应的标准库。如果是其它系列芯片,其配置思路和本文所说的大致相同。
输入捕获可以对输入的信号的上升沿,下降沿或者双边沿进行捕获,常用的有测量输入信号的脉宽和测量PWM输入信号的频率和占空比这两种。输入捕获的原理大概就是,当捕获到信号的跳变沿的时候,把计数器 CNT 的值锁存到捕获寄存器 CCR 中,把前后两次捕获到的 CCR 寄存器中的值相减,就可以算出脉宽或者频率。如果捕获的脉宽的时间长度超过捕获定时器的周期,就会发生溢出,就需要做额外的处理。因此配置TIM定时器输入捕获时,尽可能将TIM定时器的周期拉大。
如下图所示是STM32的官方参考手册,可以得知STM32的TIM定时器有两种模式都可以用于输入捕获,即TIM输入捕获模式、PWM输入模式。 其中PWM输入模式是TIM输入捕获的一个特例,配置方法是基本相同的,但是多了几步其它的操作。 且 PWM输入模式会采用两路通道进行采集信号,但是配置时,仅需配置一路主通道,TIM会自动设置另一路通道, 这两路通道是极性相反的。
输入捕获一般以中断形式启动,在中断中对上升沿和下降沿进行处理,读取TIM定时器的脉冲捕捉通道的计数值,将一个周期的数据记录并通过公式计算处理后,即可得出输入信号的频率、占空比信息。如下所示为一个周期的PWM脉冲,如果需要测量其PWM频率+占空比,则需读取其一个周期内的信号起始上升沿,下降沿及最后一个上升沿信号。
周期:T = TH + TL
频率:F = 1 / T
占空比:D = TH / (TH + TL)

TIM输入捕获的流程配置思路:
- 配置总线时钟
- 配置GPIO端口引脚
- 配置TIM定时器时基
- 配置NVIC中断
- 配置IC输入捕获模式
如果只采集PMW脉冲的频率,那么只需要使用单通道采集上升沿(或下降沿)信号,就可以求得频率值。(两次高电平或两次低电平直接的时间值,就可以计算出PWM的频率)。如果不仅需要采集PWM频率,还要采集PWM的占空比,那么需要同时采集上升沿和下降沿信号。
采集PWM脉冲频率及占空比数据可以使用单通道采集,也可以使用双通道采集。本文讲解单通道采集PWM频率+占空比,即采集一个周期内的 2次上升沿+1次下降沿或2次下降沿+1次上升沿。

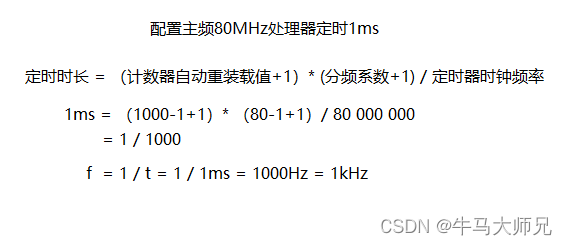
在设置计数器counter period,即自动重装载值拉满时(0xFFFF),修改配置预分频PSC的值可以调整定时器的定时时间t。
2、HAL库版TIM输入捕获
配置PA7为脉冲捕捉引脚,TIM3_CH2
在STM32CubeMX中配置步骤如下:


生成了代码工程代码后,在其回调函数中,进行读取PWM输入捕获计数值,以进行频率+占空比计算操作。
HAL库TIM中断回调函数:
volatile float TIM3CH2_Freq = 0.0;
volatile float TIM3CH2_Duty = 0.0;
volatile int capture_end_flag = 0;volatile uint32_t high_val = 0;
volatile uint32_t low_val = 0;//TIM单通道采集PWM频率+占空比
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{ static uint8_t capture_cnt = 1; //电平捕捉计数if(htim->Instance == TIM3) //判断是否由定时器3产生{if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2) //TIM3 通道2{ if(capture_end_flag == 0){if(capture_cnt == 1) //第一个上升沿{capture_cnt = 2;__HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_2, TIM_INPUTCHANNELPOLARITY_FALLING); //设置成下降沿触发__HAL_TIM_SetCounter(htim, 0); //清空定时器计数值high_val = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2); //由第一个上升沿设为起始位置}else if(capture_cnt == 2) //第一个下降沿{capture_cnt = 3;low_val = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2); //低电平起始位置__HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_2,TIM_INPUTCHANNELPOLARITY_RISING); //设置成上升沿触发}else if(capture_cnt == 3) //第二个上升沿{capture_cnt = 1;high_val = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2);//计算频率TIM3CH2_Freq = (float)80000000 / 80 / (high_val+1);//计算占空比TIM3CH2_Duty = (float)low_val / (high_val+1);capture_end_flag = 1;}}}}
}HAL库主函数:
#include "main.h"
#include "stdio.h"
#include "adc.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"void SystemClock_Config(void);void main(void)
{HAL_Init();SystemClock_Config(); MX_USART1_UART_Init();MX_TIM3_Init();HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_2);while (1){HAL_Delay(3000); if(capture_end_flag == 1){//计算频率//TIM3CH2_Freq = (float)80000000 / 80 / (high_val+1);//计算占空比//TIM3CH2_Duty = (float)(low_val+1) / (high_val+1);//printf("high_val:%d\r\n", high_val);//printf("low_val:%d\r\n", low_val); printf("捕获PWM频率:%.2f\r\n", TIM3CH2_Freq);printf("捕获PWM占空比:%.2f\r\n", TIM3CH2_Duty);capture_end_flag = 0;}}
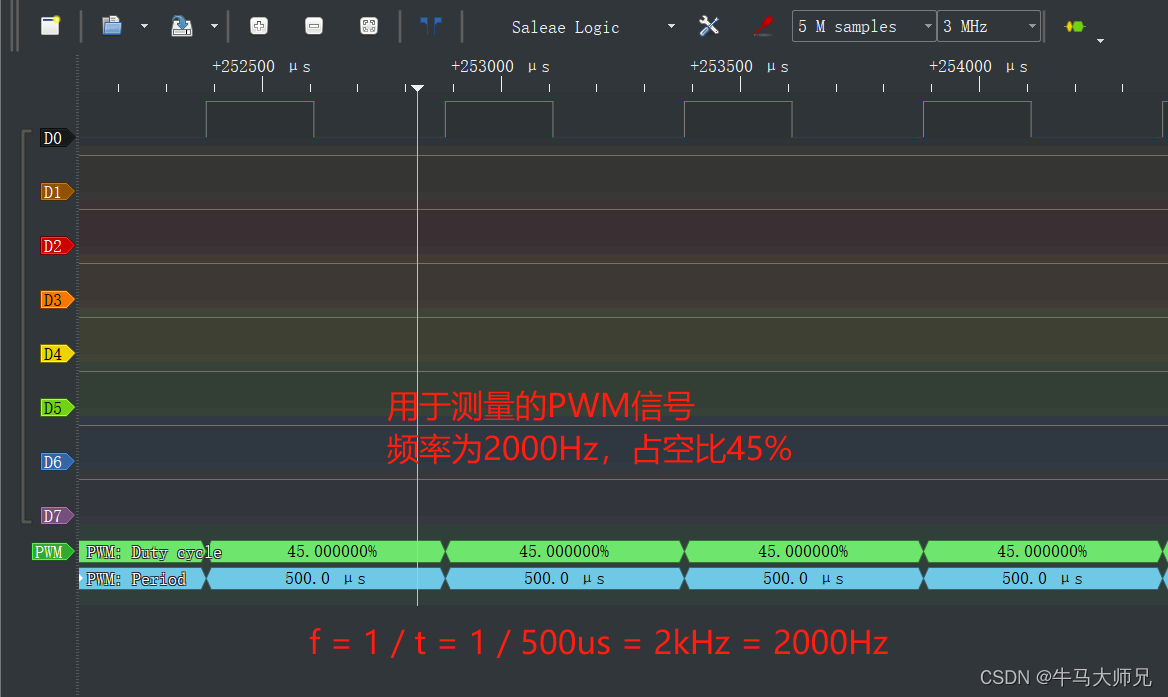
}输出2000Hz,占空比为45%的PWM信号
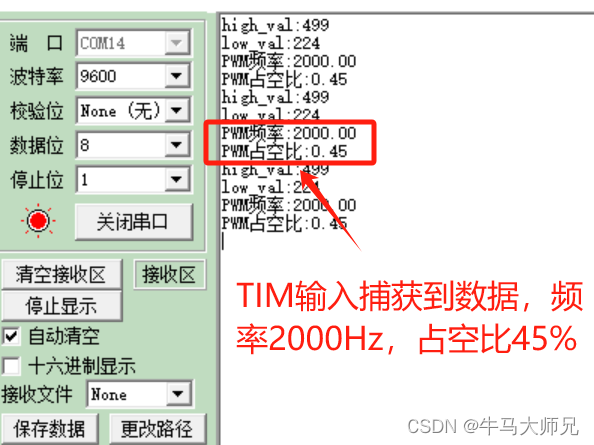
HAL版的TIM输入捕获到的信号数据
3、标准库版TIM输入捕获
配置PD15引脚,TIM4_CH4为输入捕获模式

标准库TIM配置及中断服务函数配置:
//TIM输入捕获配置
void Capture_Wave_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;TIM_ICInitTypeDef TIM_ICInitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE); //PD15 TIM4_CH4GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;GPIO_Init(GPIOD, &GPIO_InitStructure);GPIO_PinAFConfig(GPIOD, GPIO_PinSource15, GPIO_AF_TIM4);TIM_TimeBaseInitStructure.TIM_Period = 65535;TIM_TimeBaseInitStructure.TIM_Prescaler = 84-1;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStructure);NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);TIM_ICInitStructure.TIM_Channel = TIM_Channel_4;TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;TIM_ICInitStructure.TIM_ICFilter = 0xF;TIM_ICInit(TIM4, &TIM_ICInitStructure);TIM_Cmd(TIM4, ENABLE);TIM_ITConfig(TIM4, TIM_IT_CC4, ENABLE);
}uint32_t Cap_Freq = 0;
uint8_t Cap_Duty = 0;
uint8_t capture_cnt = 1;
uint8_t capture_end_flag = 0;
volatile uint32_t high_val = 0;
volatile uint32_t low_val = 0;
//TIM输入捕获中断函数
void TIM4_IRQHandler(void)
{if(TIM_GetITStatus(TIM4, TIM_IT_CC4) == SET) {TIM_ClearITPendingBit(TIM4, TIM_IT_CC4);if(capture_cnt == 1) //第一次上升沿{TIM_SetCounter(TIM4, 0);high_val = TIM_GetCapture4(TIM4);TIM_OC4PolarityConfig(TIM4, TIM_ICPolarity_Falling); //下降沿捕获 capture_cnt = 2;}else if(capture_cnt == 2) //第一次下降沿{low_val = TIM_GetCapture4(TIM4);TIM_OC4PolarityConfig(TIM4, TIM_ICPolarity_Rising); //上升沿捕获capture_cnt = 3;}else if(capture_cnt == 3) //第二次上升沿{high_val = TIM_GetCapture4(TIM4);Cap_Freq = 84000000 / 84 / (high_val+1); //如果是高级定时器(TIM1、TIM8))需要修改为Cap_Freq = 168000000 / 168 / (high_val+1);Cap_Duty = (low_val+1) * 100 / (high_val+1);capture_cnt = 1;capture_end_flag = 1;}}
}标准库主函数:
#include "stm32f4xx.h"
#include <stdio.h>
#include "usart.h"
#include "delay.h"
#include "pwm.h"int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);USART1_Init();printf("\r\nStarting...\r\n");Capture_Wave_Init();int cnt = 0;while(1){delay_ms(1000);printf("--------%d--------\r\n", cnt++);if(capture_end_flag == 1){printf("Cap_Freq:%d\r\n", Cap_Freq);printf("Cap_Duty:%d\r\n", Cap_Duty);printf("high_val:%d\r\n", high_val);printf("low_val:%d\r\n", low_val);} }return 0;
}输出100Hz,占空比为99%的PWM信号
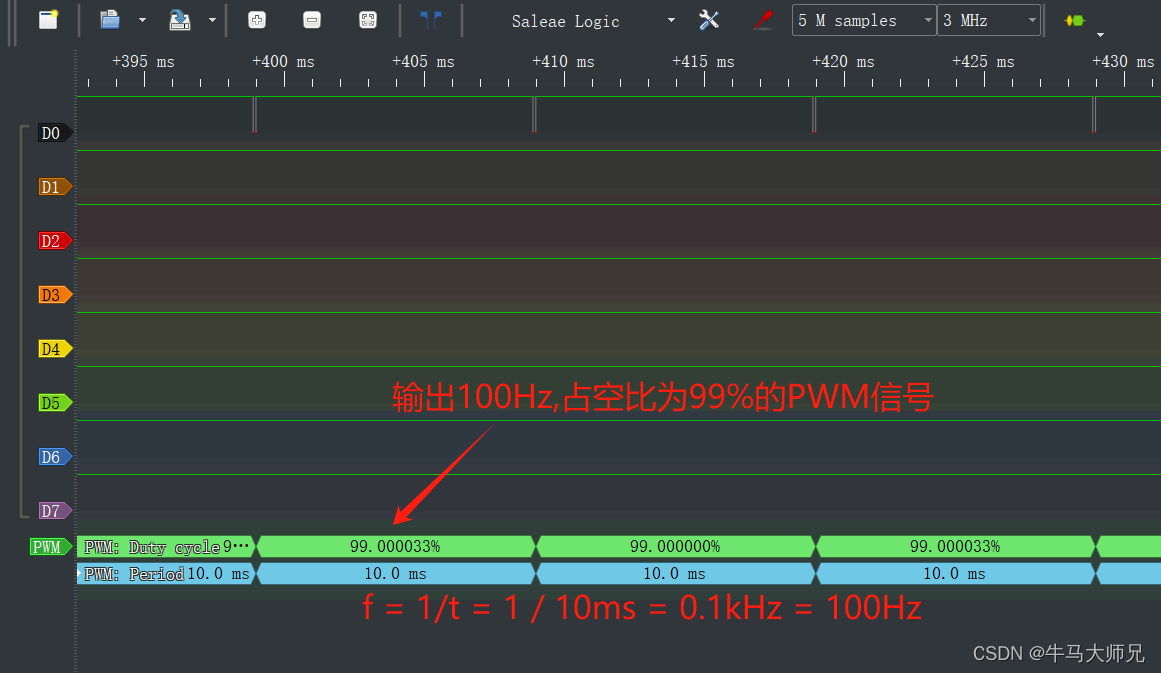
标准库版的TIM输入捕获到的信号数据