文章目录
- 目标检测介绍
- 目标检测算法分类
- 目标检测算法模型组成
- 经典目标检测论文
目标检测介绍
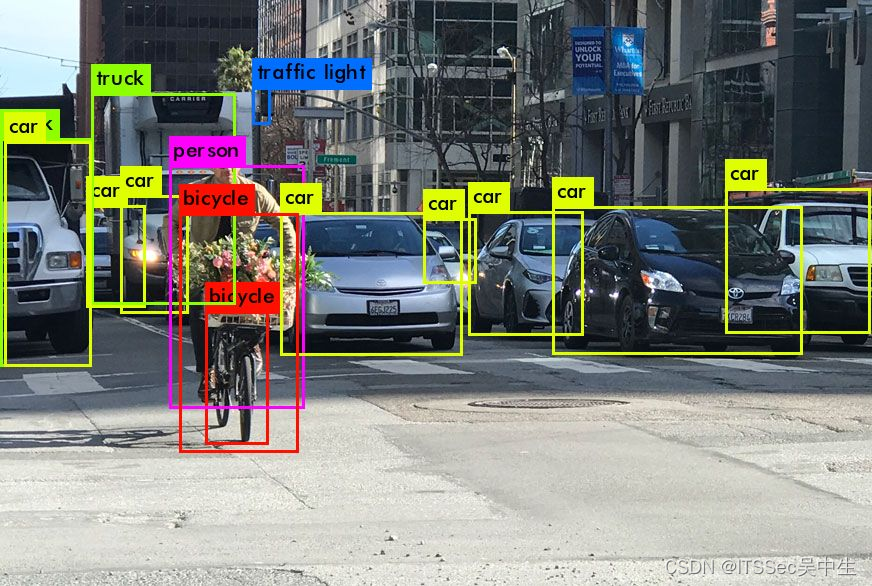
目标检测是计算机视觉领域中的一项重要任务,旨在识别图像或视频中的特定对象的位置并将其与不同类别中的对象进行分类。与图像分类任务不同,目标检测不仅需要识别出图像中的对象,还需要确定这些对象在图像中的准确位置,同时通过矩形边界框(Bounding Box)来表示。在自动驾驶领域,目标检测技术具有重要的应用,帮助自动驾驶系统识别和理解道路上的环境,从而做出适当的驾驶决策。以下是目标检测在自动驾驶领域的一些主要应用:
- 行人检测: 目标检测可用于识别道路上的行人,包括行人的位置和动态行为。这对于确保行人的安全以及避免与行人的碰撞非常重要。
- 车辆检测: 自动驾驶车辆需要准确地检测其他车辆的位置、速度和行驶方向,以便在交通中做出正确的驾驶决策,如超车、跟车等。
- 交通信号灯和标志检测: 目标检测可以帮助车辆识别交通信号灯的状态(红灯、绿灯、黄灯)以及道路上的交通标志,从而调整行驶速度和行为。
- 道路边缘和障碍物检测: 自动驾驶车辆需要检测道路边缘和障碍物,以保持在正确的车道内并避免与障碍物发生碰撞。
- 自动驾驶中的人体姿态估计: 目标检测可以用于估计驾驶员或乘客的身体姿态,以便自动驾驶系统可以更好地理解车内的情况。
- 环境感知和感知预测: 目标检测可以帮助自动驾驶系统感知周围环境中的不同目标,并预测它们的行为和轨迹,以做出相应的驾驶决策。
- 道路几何检测: 目标检测可以用于检测道路的几何特征,如车道线和路缘石,以提供更准确的定位和导航信息。
- 自动泊车: 在自动泊车场景中,目标检测可用于检测停车位的位置和大小,以及其他可能的障碍物,以确保安全的泊车过程。
目标检测算法分类
目标检测算法可以有多种划分方法。按照stage个数划分,可以分为:one-stage(一阶段)算法和two-stage(两阶段)算法,按照是否需要预定义anchor划分,也可分为anchor-based和anchor-free。以下是按照stage个数进行划分的案例:
-
one-stage代表算法: RetinaNet、YOLO系列、FCOS、SSD等。
-
two-stage代表算法: R-CNN、SPPNet、Fast R-CNN、Faster R-CNN、Mask R-CNN、Cascade R-CNN、Sparse R-CNN等。
-
理解: two-stage算法会先①生成一个候选区域(region proposal),然后②利用CNN对每个候选区域进行分类;而one-stage算法则一步到位,直接输出每个候选区域及对应的分类结果。
-
Anchor-Based(基于锚点的方法):Faster R-CNN、YOLO系列、SSD、Cascade R-CNN、RetinaNet
-
Anchor-Free(无锚点方法):CenterNet、FCOS、CornerNet
目标检测算法模型组成
目标检测算法训练阶段的模型主要由以下几个部分组成,分别是:Backbone、Neck、Head、Enhance、BBox Assigner、BBox Sampler、BBox Encoder、 Loss组成。
-
Backbone: Backbone(主干网络)的主要作用是特征提取。常见的Backbone有:ResNet、ResNext、Res2Net、ResNeSt、DarkNet、HRNet、RegNet等。
-
Neck: Neck可以认为是Backbone和Head的连接层,主要负责对Backbone提取的的特征进行高效融合和增强,能够对输入的单尺度或者多尺度特征进行融合、增强输出等。常见的Neck有:FPN、BFP、RFP、PAFPN、NAS_FPN、HRFPN等。
-
Head: 目标检测算法输出一般包括分类(比如:人、汽车等)和框坐标回归(标记"人"的矩形框对应的坐标)两个分支。
-
Enhance: Enhance是即插即用、能够对特征进行增强的模块。常用的Enhance模块有:SPP、ASPP、RFB、Dropout、Dropblock、DCN以及各种注意力模块SeNet、Non_local、CBA等。
-
BBox Assigner: 待更新
-
BBox Sampler: 待更新
-
BBox Encoder: 待更新
-
Loss: Loss(损失)通常分为分类Loss和回归Loss,主要对Head网络输出的预测值和BBox encoder得到的targets进行梯度下降迭代训练。常见的分类Loss有:BCELoss、CELoss、FocalLoss、QualityFocalLoss、VarifocalLoss、GaussianFocalLoss、GHMC、OHEM等;常见的回归Loss有:L1/L2 Loss、SmoothL1Loss、BalancedL1Loss、DistributionFocalLoss、GHMR、IoU/BoundeIoU/GIoU/CIoU Loss等。
-
训练技巧: 目标检测算法的训练技巧非常多,常说的调参很大一部分工作都是在设置这部分超参。这部分内容比较杂乱,很难做到完全统一,目前主流的tricks有:大batch训练、分布式训练和同步BN、Warm Up、余弦学习率、多尺度训练、模型EMA、知识蒸馏、Label Smoothing、对抗训练、随机权重平均、遗传算法自动超参数搜索等。
-
图像数据增强: 图像数据增强旨在通过对原始图像进行一系列变换和修改,从而生成更多、多样化的训练样本。常见的数据增强方法有:常规的图像数据增强(翻转、旋转、平移、缩放、裁剪、色彩变换、噪声添加等)、AutoAug、RandAug、MixUp/CutMix、Mosaic、Stitcher等。
经典目标检测论文
- R-CNN (Region-based Convolutional Neural Networks): [2014-CVPR] Rich feature hierarchies for accurate object detection and semantic segmentation. [pdf]
- Fast R-CNN: [2015-ICCV] Fast R-CNN. [pdf]
- Faster R-CNN: [2015-NeurIPS] Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks [pdf]
- YOLO (You Only Look Once): [2016-CVPR] You Only Look Once: Unified, Real-Time Object Detection. [pdf]
- SSD (Single Shot MultiBox Detector): [2016-ECCV] SSD: Single Shot MultiBox Detector. [pdf]
- RetinaNet: [2017-CVPR] Focal Loss for Dense Object Detection. [pdf]
- EfficientDet: [2020-CVPR] EfficientDet: Scalable and Efficient Object Detection. [pdf]
- Cascade R-CNN: [2018-CVPR] Cascade R-CNN: Delving into High Quality Object Detection [pdf]