目录
USART串口
串口发送
串口发送+接收
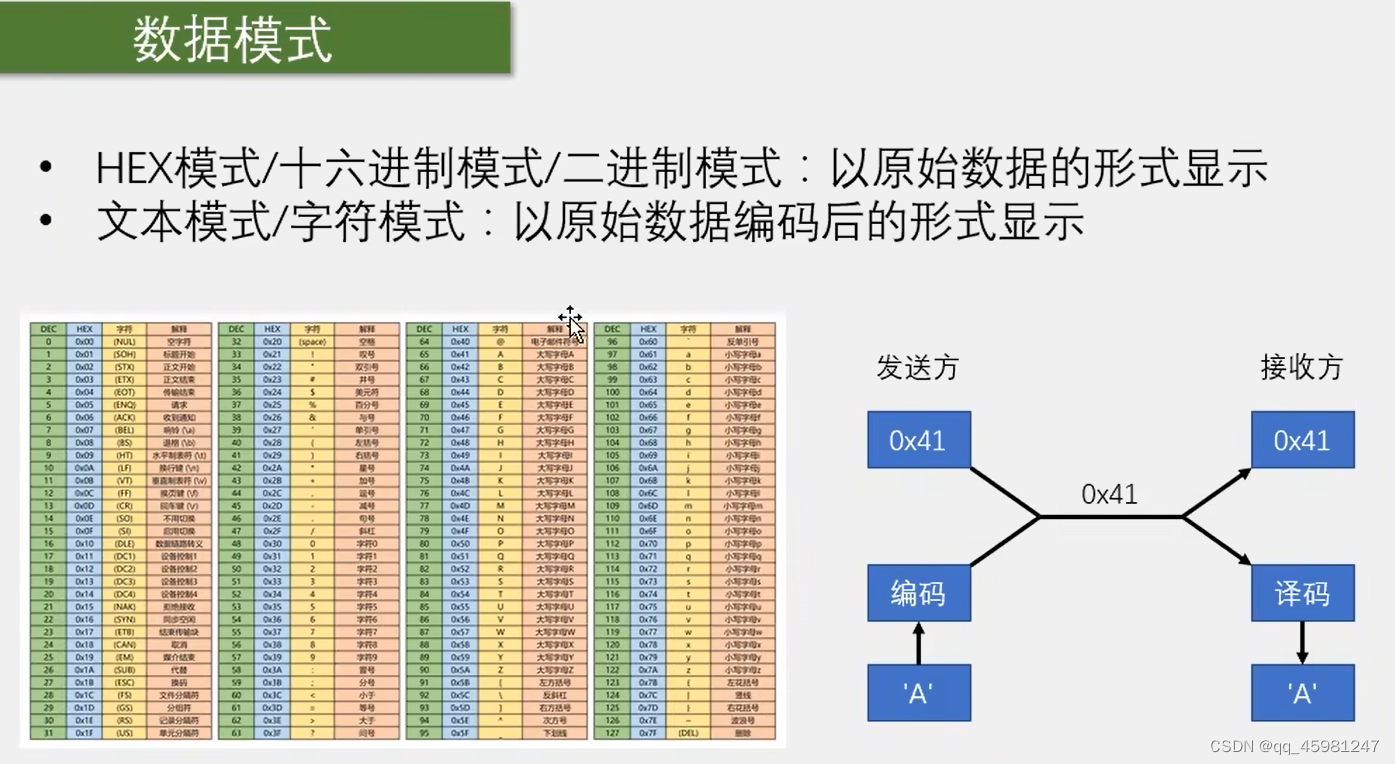
串口收发HEX数据包
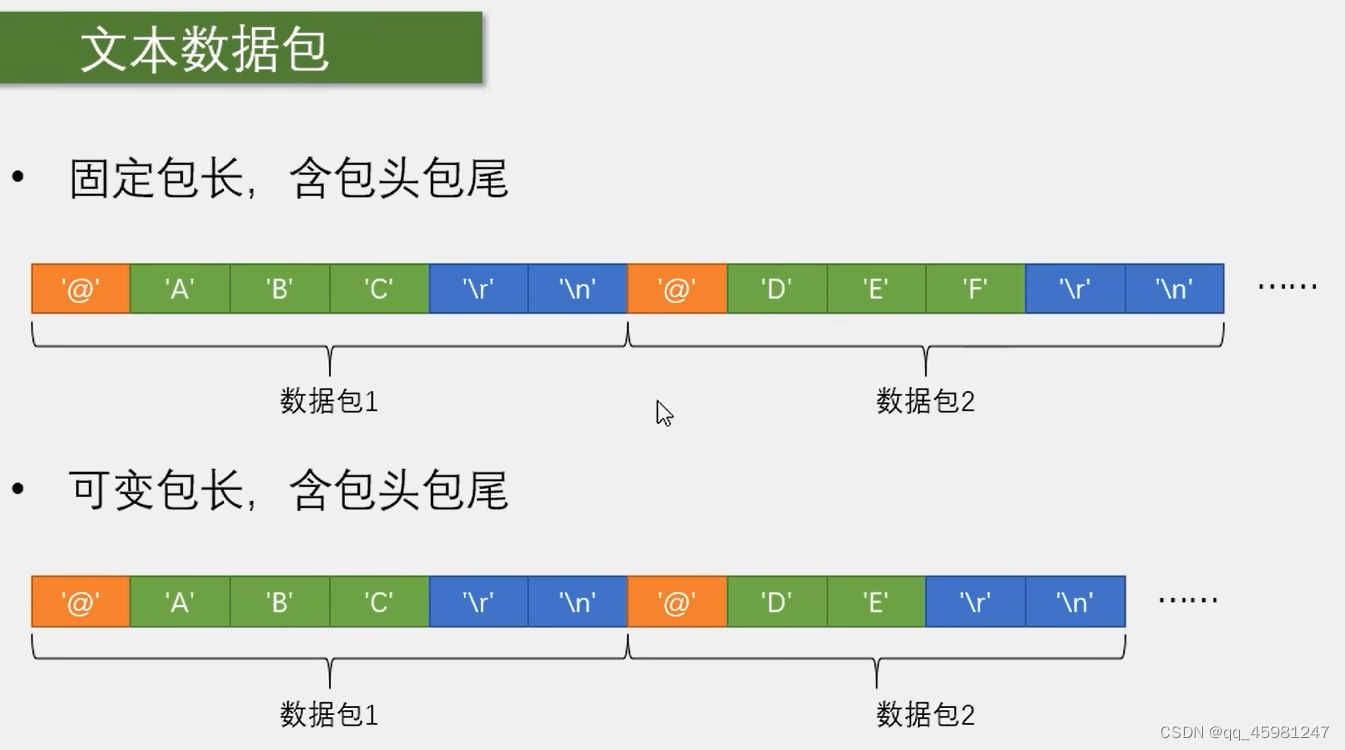
串口收发文本数据包
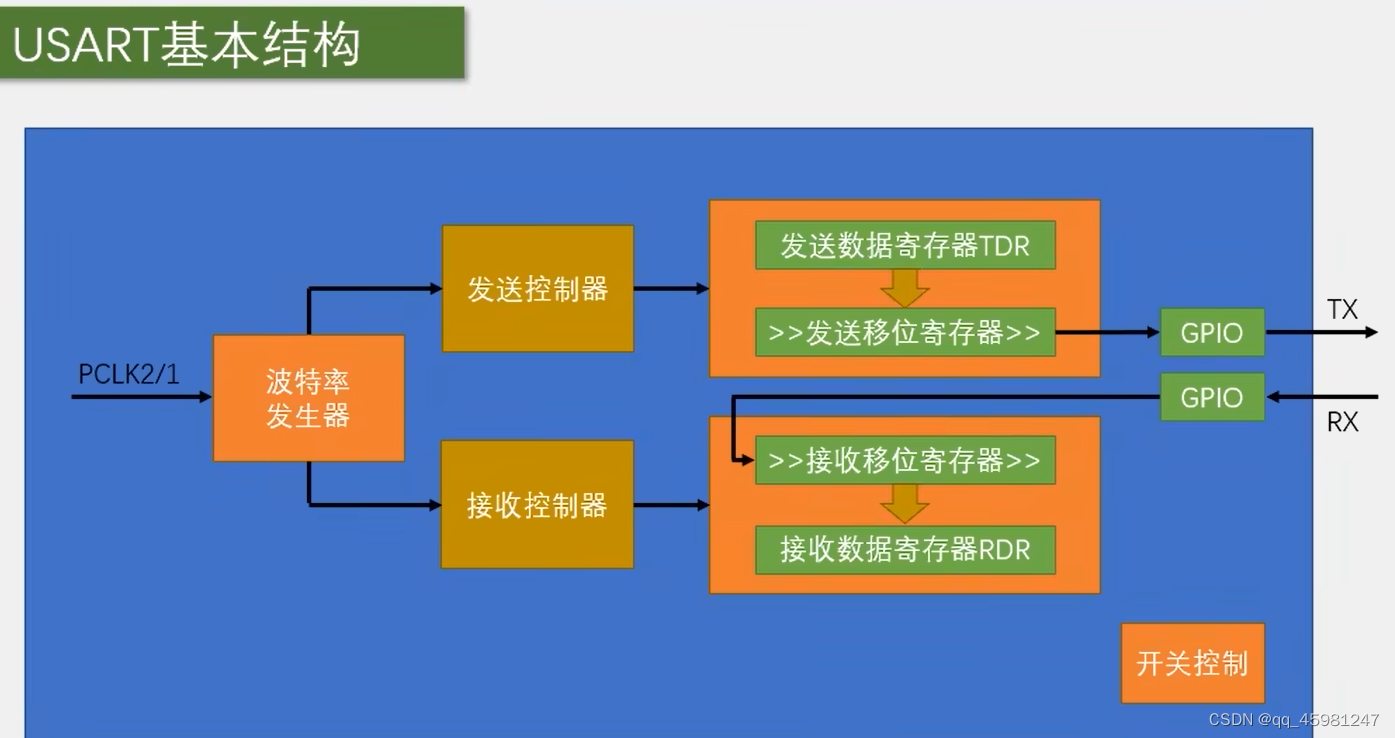
USART串口







串口发送
Serial.c
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"/*** @brief 初始化串口以及引脚配置* @param 无* @retval 无*/
void Serial_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//TX引脚配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//为什么?查表手册推荐GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//串口配置USART_InitTypeDef USART_InitStructrue;USART_InitStructrue.USART_BaudRate = 9600;//波特率配置USART_InitStructrue.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件流控制(无)USART_InitStructrue.USART_Mode = USART_Mode_Tx;//串口模式(发送)USART_InitStructrue.USART_Parity = USART_Parity_No;//校验位(无)USART_InitStructrue.USART_StopBits = USART_StopBits_1;//停止位(1位)USART_InitStructrue.USART_WordLength = USART_WordLength_8b;//字长(8位)USART_Init(USART1,&USART_InitStructrue);USART_Cmd(USART1,ENABLE);//开启USART1
}/*** @brief 发送一个字节* @param Byte 发送的字节* @retval 无*/
void Serial_SendByte(uint8_t Byte)
{USART_SendData(USART1,Byte);while (USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);//完成传输之前进行空循环//TXE位置一后,会自动清除标志位,详看手册
}/*** @brief 发送一个数组* @param Array:发送的数组* @param Length:发送数组的长度* @retval 无*/
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{uint16_t i;for(i = 0; i < Length; i ++){Serial_SendByte(Array[i]);}
}/*** @brief 发送一个字符串* @param String:发送的字符串* @retval 无*/
void Serial_SendString(char *String)
{uint8_t i;for(i = 0; String[i] != '\0'; i ++)//判断是否为结束标志位{Serial_SendByte(String[i]);}
}/*** @brief 计算X^Y* @param X:底数 Y:幂次* @retval Res:X^Y的结果*/
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{uint32_t Res = 1;while(Y --){Res *= X;}return Res;
}/*** @brief 发送一个无符号数字* @param Number:发送的数字* @param Length:数字的长度* @retval 无*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{uint8_t i;for( i = 0; i < Length; i ++){//Serial_SendByte(Number / Serial_Pow(10,Length - i - 1) % 10 + 0x30);//从最高位开始获取各位数字Serial_SendByte(Number / Serial_Pow(10,Length - i - 1) % 10 + '0');}
}int fputc(int ch,FILE *f)//重写fputc函数,将fputc重定向到串口
{Serial_SendByte(ch);return ch;
}/*** @brief 封装vsprintf可变参数* @param 可变参数* @retval 无*/
void Serial_Printf(char *format,...)
{char String[100];va_list arg;//定义参数列表变量va_start(arg , format);//从format位置接收参数表,放入arg中vsprintf(String, format ,arg);//打印位置 格式化字符串 参数表//sprintf只能接收直接写的参数,封装格式需要vsprintfva_end(arg);//释放参数表Serial_SendString(String);
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"int main(void)
{OLED_Init();Serial_Init();uint8_t MyArray[4] = {0x42, 0x43, 0x44, 0x45};Serial_SendByte(0x41);Serial_SendArray(MyArray,4);Serial_Printf("\r\n");Serial_SendString("Hello\r\n");//\r回车 \n换行Serial_SendNumber(1234,4);Serial_Printf("\r\n");//移植printf函数://1.重写fputc函数,将fputc重定向到串口(printf此时只有一个)printf("Num = %d\r\n",666);//2.使用sprintf函数char String[100];sprintf(String,"Num = %d\r\n",666);//sptintf可以指定打印位置,不涉及重定向Serial_SendString(String);//3.封装sprintf函数Serial_Printf("Num = %d\r\n",666);//输出汉字Serial_Printf("你好,世界");//utf8 --no-multibyte-charswhile(1){}}串口发送+接收
Serial.c
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"uint8_t Serial_RxData;//数据存放位置
uint8_t Serial_RxFlag;//数据是否读到标志位/*** @brief 串口,引脚以及中断初始化* @param 无* @retval 无*/
void Serial_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//TX引脚配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//为什么?查表手册推荐GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//RX引脚配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//为什么?查表手册推荐(上拉输入)GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//串口配置USART_InitTypeDef USART_InitStructrue;USART_InitStructrue.USART_BaudRate = 9600;//波特率配置USART_InitStructrue.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件流控制(无)USART_InitStructrue.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//串口模式(发送接收)USART_InitStructrue.USART_Parity = USART_Parity_No;//校验位(无)USART_InitStructrue.USART_StopBits = USART_StopBits_1;//停止位(1位)USART_InitStructrue.USART_WordLength = USART_WordLength_8b;//字长(8位)USART_Init(USART1,&USART_InitStructrue);//中断方式接收USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//当接收到字节时触发中断//配置NVICNVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//相应优先级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能通道NVIC_Init(&NVIC_InitStructure);USART_Cmd(USART1,ENABLE);//开启USART1}/*** @brief 发送一个字节* @param Byte 发送的字节* @retval 无*/
void Serial_SendByte(uint8_t Byte)
{USART_SendData(USART1,Byte);while (USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);//完成传输之前进行空循环//TXE位置一后,会自动清除标志位,详看手册
}/*** @brief 发送一个数组* @param Array:发送的数组* @param Length:发送数组的长度* @retval 无*/
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{uint16_t i;for(i = 0; i < Length; i ++){Serial_SendByte(Array[i]);}
}/*** @brief 发送一个字符串* @param String:发送的字符串* @retval 无*/
void Serial_SendString(char *String)
{uint8_t i;for(i = 0; String[i] != '\0'; i ++)//判断是否为结束标志位{Serial_SendByte(String[i]);}
}/*** @brief 计算X^Y* @param X:底数 Y:幂次* @retval Res:X^Y的结果*/
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{uint32_t Res = 1;while(Y --){Res *= X;}return Res;
}/*** @brief 发送一个无符号数字* @param Number:发送的数字* @param Length:数字的长度* @retval 无*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{uint8_t i;for( i = 0; i < Length; i ++){//Serial_SendByte(Number / Serial_Pow(10,Length - i - 1) % 10 + 0x30);//从最高位开始获取各位数字Serial_SendByte(Number / Serial_Pow(10,Length - i - 1) % 10 + '0');}
}int fputc(int ch,FILE *f)//重写fputc函数,将fputc重定向到串口
{Serial_SendByte(ch);return ch;
}/*** @brief 封装vsprintf可变参数* @param * @retval 无*/
void Serial_Printf(char *format,...)
{char String[100];va_list arg;//定义参数列表变量va_start(arg , format);//从format位置接收参数表,放入arg中vsprintf(String, format ,arg);//打印位置 格式化字符串 参数表//sprintf只能接收直接写的参数,封装格式需要vsprintfva_end(arg);//释放参数表Serial_SendString(String);
}/*** @brief 获取读取完成标志位* @param 无* @retval 0:未读到数据* @retval 1:成功读到数据*/
uint8_t Serial_GetRxFlag(void)
{if(Serial_RxFlag == 1){Serial_RxFlag = 0;//将其重新置零,并返回1return 1;}return 0;
}/*** @brief 获取接收到的数据* @param 无* @retval 接收到的数据*/
uint8_t Serial_GetRxData(void)
{return Serial_RxData;
}/*** @brief 串口1中断函数* @param 无* @retval 无*/
void USART1_IRQHandler(void)
{if(USART_GetITStatus(USART1,USART_IT_RXNE) == SET)//说明已经接收到数据{Serial_RxData = USART_ReceiveData(USART1);//转存Serial_RxFlag = 1;//读完后将自己设置标志位置一//如果此时没有读取DR,则需要手动清除标志位USART_ClearITPendingBit(USART1,USART_IT_RXNE); }
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"uint8_t RxData;int main(void)
{OLED_Init();OLED_ShowString(1,1,"RxData:");Serial_Init();while(1) {//查询方式接收
// while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) == SET)//表示接收到数据
// {
// RxData = USART_ReceiveData(USART1);//当读完DR寄存器时,会自动将标志位清除
// OLED_ShowHexNum(1,1,RxData,2);
// }//中断方式接收if(Serial_GetRxFlag() == 1){RxData = Serial_GetRxData();OLED_ShowHexNum(1,8,RxData,2);Serial_SendByte(RxData);//数据回传}}}
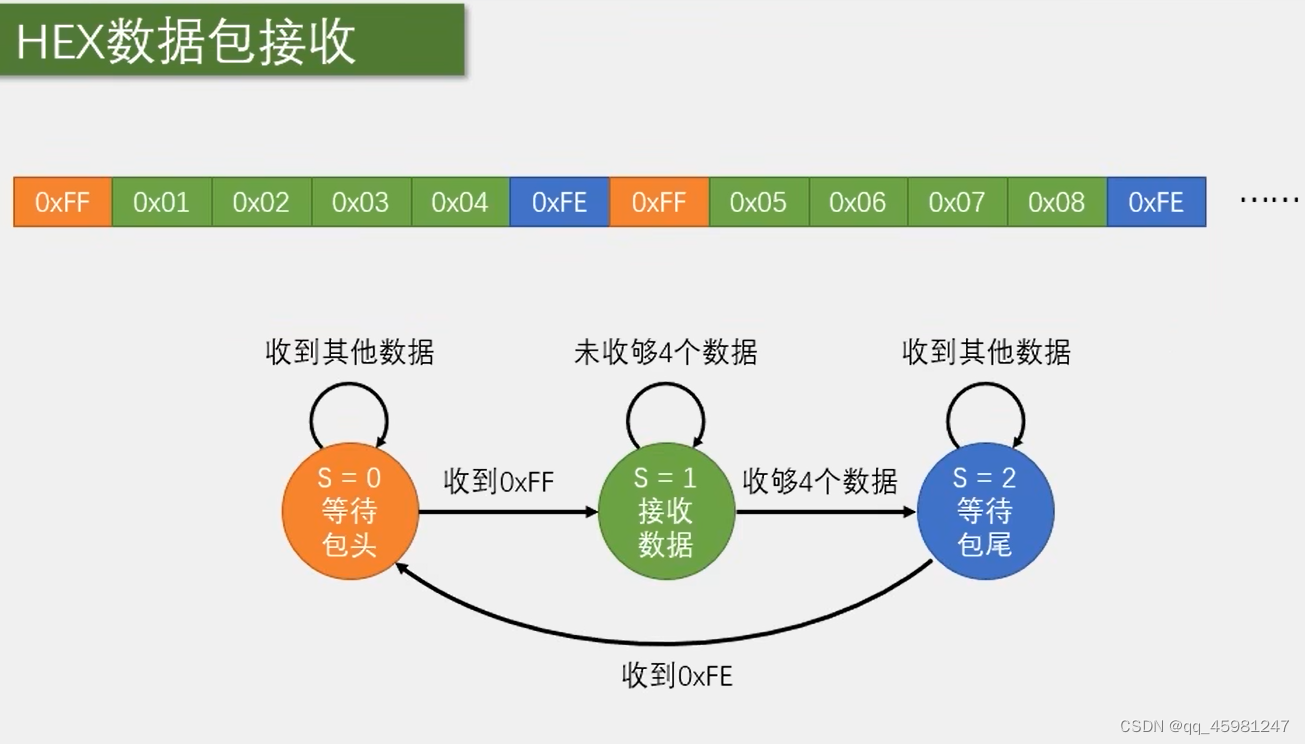
串口收发HEX数据包
Serial.c
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"uint8_t Serial_TxPacket[4];
uint8_t Serial_RxPacket[4];
uint8_t Serial_RxFlag;/*** @brief 串口,引脚以及中断初始化* @param 无* @retval 无*/
void Serial_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//TX引脚配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//为什么?查表手册推荐GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//RX引脚配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//为什么?查表手册推荐(上拉输入)GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//串口配置USART_InitTypeDef USART_InitStructrue;USART_InitStructrue.USART_BaudRate = 9600;//波特率配置USART_InitStructrue.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件流控制(无)USART_InitStructrue.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//串口模式(发送接收)USART_InitStructrue.USART_Parity = USART_Parity_No;//校验位(无)USART_InitStructrue.USART_StopBits = USART_StopBits_1;//停止位(1位)USART_InitStructrue.USART_WordLength = USART_WordLength_8b;//字长(8位)USART_Init(USART1,&USART_InitStructrue);//中断方式接收USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//当接收到字节时触发中断//配置NVICNVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//相应优先级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能通道NVIC_Init(&NVIC_InitStructure);USART_Cmd(USART1,ENABLE);//开启USART1}/*** @brief 发送一个字节* @param Byte 发送的字节* @retval 无*/
void Serial_SendByte(uint8_t Byte)
{USART_SendData(USART1,Byte);while (USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);//完成传输之前进行空循环//TXE位置一后,会自动清除标志位,详看手册
}/*** @brief 发送一个数组* @param Array:发送的数组* @param Length:发送数组的长度* @retval 无*/
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{uint16_t i;for(i = 0; i < Length; i ++){Serial_SendByte(Array[i]);}
}/*** @brief 发送一个字符串* @param String:发送的字符串* @retval 无*/
void Serial_SendString(char *String)
{uint8_t i;for(i = 0; String[i] != '\0'; i ++)//判断是否为结束标志位{Serial_SendByte(String[i]);}
}/*** @brief 计算X^Y* @param X:底数 Y:幂次* @retval Res:X^Y的结果*/
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{uint32_t Res = 1;while(Y --){Res *= X;}return Res;
}/*** @brief 发送一个无符号数字* @param Number:发送的数字* @param Length:数字的长度* @retval 无*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{uint8_t i;for( i = 0; i < Length; i ++){//Serial_SendByte(Number / Serial_Pow(10,Length - i - 1) % 10 + 0x30);//从最高位开始获取各位数字Serial_SendByte(Number / Serial_Pow(10,Length - i - 1) % 10 + '0');}
}int fputc(int ch,FILE *f)//重写fputc函数,将fputc重定向到串口
{Serial_SendByte(ch);return ch;
}/*** @brief 封装vsprintf可变参数* @param * @retval 无*/
void Serial_Printf(char *format,...)
{char String[100];va_list arg;//定义参数列表变量va_start(arg , format);//从format位置接收参数表,放入arg中vsprintf(String, format ,arg);//打印位置 格式化字符串 参数表//sprintf只能接收直接写的参数,封装格式需要vsprintfva_end(arg);//释放参数表Serial_SendString(String);
}/*** @brief 将载荷数据加上包头与包尾并发送一个数据包* @param 无* @retval 无*/
void Serial_SendPacket(void)
{Serial_SendByte(0xFF);//发送包头Serial_SendArray(Serial_TxPacket,4);//发送载荷数据Serial_SendByte(0xFE);//发送包尾
}/*** @brief 读取是否接收到数据包标志位* @param 无* @retval 0:未读到数据包* @retval 1:成功读到数据包*/
uint8_t Serial_GetRxFlag(void)
{if(Serial_RxFlag == 1){Serial_RxFlag = 0;//将其重新置零,并返回1return 1;}return 0;
}/*** @brief 串口1中断函数* @param 无* @retval 无*/
void USART1_IRQHandler(void)
{static uint8_t Rx_State = 0;static uint8_t pRx_Packet = 0;if(USART_GetITStatus(USART1,USART_IT_RXNE) == SET)//说明已经接收到数据{uint8_t Rx_Data = USART_ReceiveData(USART1);//获取读到的数据if(Rx_State == 0){if(Rx_Data == 0xFF)//接收到包头{Rx_State = 1;//转至下一状态pRx_Packet = 0;//将指针清零,为接收做准备}}else if(Rx_State == 1){Serial_RxPacket[pRx_Packet] = Rx_Data;//将接收到的数据放入缓冲区pRx_Packet ++;//指针加一if(pRx_Packet >= 4)//4个载荷数据收完{Rx_State = 2;//转至下一状态}}else if(Rx_State == 2){if(Rx_Data == 0xFE)//判断是否为包尾{Rx_State = 0;//清零,为下次做准备Serial_RxFlag= 1;//将接收一个数据包标志位置一}}USART_ClearITPendingBit(USART1,USART_IT_RXNE);//清除标志位 }
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"uint8_t KeyNum;int main(void)
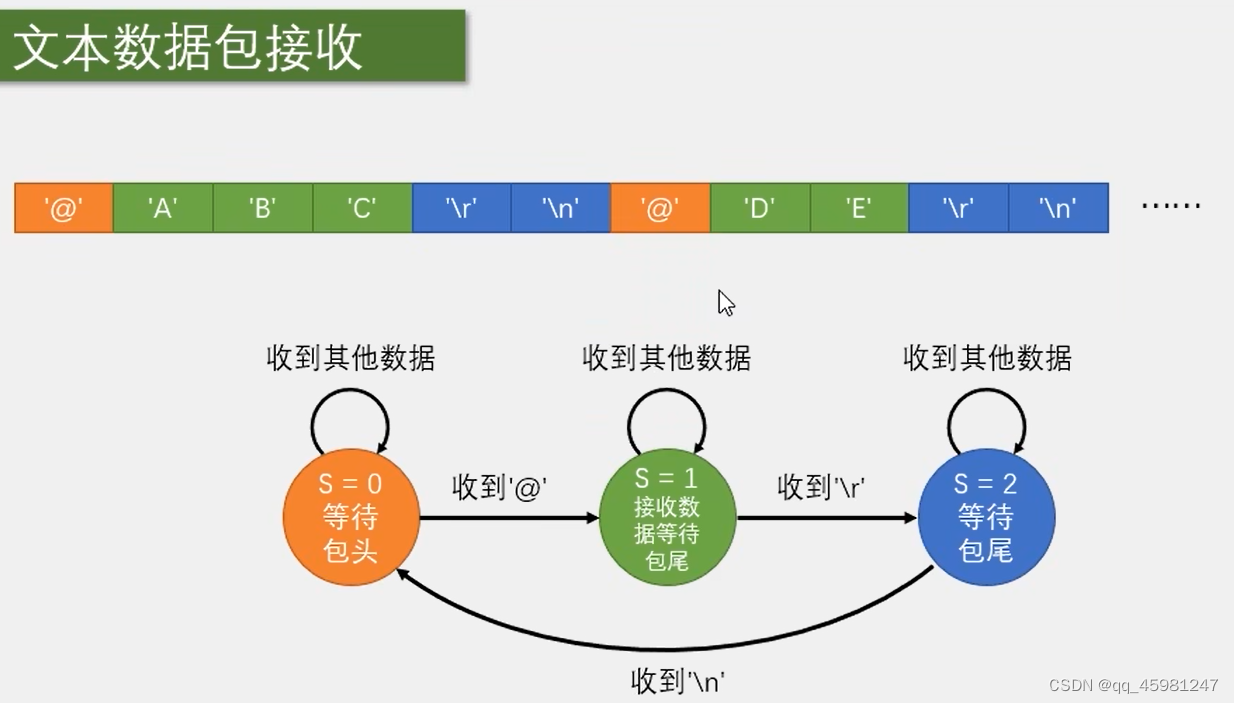
{OLED_Init();Key_Init();Serial_Init();OLED_ShowString(1,1,"TxPacket");OLED_ShowString(3,1,"RxPacket");Serial_TxPacket[0] = 0x01;Serial_TxPacket[1] = 0x02;Serial_TxPacket[2] = 0x03;Serial_TxPacket[3] = 0x04;while(1) {KeyNum = Key_GetNum();if(KeyNum == 1){ Serial_TxPacket[0] ++;Serial_TxPacket[1] ++;Serial_TxPacket[2] ++;Serial_TxPacket[3] ++; Serial_SendPacket(); OLED_ShowHexNum(2,1,Serial_TxPacket[0],2);OLED_ShowHexNum(2,4,Serial_TxPacket[1],2);OLED_ShowHexNum(2,7,Serial_TxPacket[2],2);OLED_ShowHexNum(2,10,Serial_TxPacket[3],2);}if(Serial_GetRxFlag() == 1)//表示收到数据包{OLED_ShowHexNum(4,1,Serial_RxPacket[0],2);OLED_ShowHexNum(4,4,Serial_RxPacket[1],2);OLED_ShowHexNum(4,7,Serial_RxPacket[2],2);OLED_ShowHexNum(4,10,Serial_RxPacket[3],2);}}}串口收发文本数据包
Serial.c
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"char Serial_RxPacket[100];//接收缓存区
uint8_t Serial_RxFlag;/*** @brief 串口,引脚以及中断初始化* @param 无* @retval 无*/
void Serial_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//TX引脚配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//为什么?查表手册推荐GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//RX引脚配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//为什么?查表手册推荐(上拉输入)GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//串口配置USART_InitTypeDef USART_InitStructrue;USART_InitStructrue.USART_BaudRate = 9600;//波特率配置USART_InitStructrue.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件流控制(无)USART_InitStructrue.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//串口模式(发送接收)USART_InitStructrue.USART_Parity = USART_Parity_No;//校验位(无)USART_InitStructrue.USART_StopBits = USART_StopBits_1;//停止位(1位)USART_InitStructrue.USART_WordLength = USART_WordLength_8b;//字长(8位)USART_Init(USART1,&USART_InitStructrue);//中断方式接收USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//当接收到字节时触发中断//配置NVICNVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//相应优先级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能通道NVIC_Init(&NVIC_InitStructure);USART_Cmd(USART1,ENABLE);//开启USART1}/*** @brief 发送一个字节* @param Byte 发送的字节* @retval 无*/
void Serial_SendByte(uint8_t Byte)
{USART_SendData(USART1,Byte);while (USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);//完成传输之前进行空循环//TXE位置一后,会自动清除标志位,详看手册
}/*** @brief 发送一个数组* @param Array:发送的数组* @param Length:发送数组的长度* @retval 无*/
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{uint16_t i;for(i = 0; i < Length; i ++){Serial_SendByte(Array[i]);}
}/*** @brief 发送一个字符串* @param String:发送的字符串* @retval 无*/
void Serial_SendString(char *String)
{uint8_t i;for(i = 0; String[i] != '\0'; i ++)//判断是否为结束标志位{Serial_SendByte(String[i]);}
}/*** @brief 计算X^Y* @param X:底数 Y:幂次* @retval Res:X^Y的结果*/
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{uint32_t Res = 1;while(Y --){Res *= X;}return Res;
}/*** @brief 发送一个无符号数字* @param Number:发送的数字* @param Length:数字的长度* @retval 无*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{uint8_t i;for( i = 0; i < Length; i ++){//Serial_SendByte(Number / Serial_Pow(10,Length - i - 1) % 10 + 0x30);//从最高位开始获取各位数字Serial_SendByte(Number / Serial_Pow(10,Length - i - 1) % 10 + '0');}
}int fputc(int ch,FILE *f)//重写fputc函数,将fputc重定向到串口
{Serial_SendByte(ch);return ch;
}/*** @brief 封装vsprintf可变参数* @param * @retval 无*/
void Serial_Printf(char *format,...)
{char String[100];va_list arg;//定义参数列表变量va_start(arg , format);//从format位置接收参数表,放入arg中vsprintf(String, format ,arg);//打印位置 格式化字符串 参数表//sprintf只能接收直接写的参数,封装格式需要vsprintfva_end(arg);//释放参数表Serial_SendString(String);
}/*** @brief 串口1中断函数* @param 无* @retval 无*/
void USART1_IRQHandler(void)
{static uint8_t Rx_State = 0;static uint8_t pRx_Packet = 0;//状态机if(USART_GetITStatus(USART1,USART_IT_RXNE) == SET)//说明已经接收到数据{uint8_t Rx_Data = USART_ReceiveData(USART1);//获取读到的数据if(Rx_State == 0)//接收数据包头{if(Rx_Data == '@' && Serial_RxFlag == 0)//接收到包头并且标志位为零才进行读取 {Rx_State = 1;//转至下一状态pRx_Packet = 0;//将指针清零,为接收做准备}}else if(Rx_State == 1)//接收第一包尾{if(Rx_Data == '\r')//判断是否为第一包尾{Rx_State = 2;//跳转至下一状态}else{Serial_RxPacket[pRx_Packet] = Rx_Data;//将接收到的数据放入缓冲区pRx_Packet ++;//指针加一}}else if(Rx_State == 2)//接收第二包尾{if(Rx_Data == '\n')//判断是否为第二包尾{Rx_State = 0;//清零,为下次做准备Serial_RxPacket[pRx_Packet] = '\0';//在末尾加上结束标志位Serial_RxFlag= 1;//接收一个数据包后标志位置一}}USART_ClearITPendingBit(USART1,USART_IT_RXNE);//清除接收寄存器非空标志位 }
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "LED.h"
#include "String.h"int main(void)
{OLED_Init();LED_Init();Serial_Init();OLED_ShowString(1,1,"TxPacket");OLED_ShowString(3,1,"RxPacket");while(1) {if(Serial_RxFlag == 1)//接收到数据包{OLED_ShowString(4,1," ");OLED_ShowString(4,1,Serial_RxPacket);if(strcmp(Serial_RxPacket,"LED_ON") == 0){LED1_On();Serial_SendString("LED_ON_OK\r\n");OLED_ShowString(2,1," ");OLED_ShowString(2,1,"LED_ON_OK"); }else if(strcmp(Serial_RxPacket,"LED_OFF") == 0){LED1_Off();Serial_SendString("LED_OFF_OK\r\n");OLED_ShowString(2,1," ");OLED_ShowString(2,1,"LED_OFF_OK"); }else{Serial_SendString("COMMAND_ERRO\r\n");OLED_ShowString(2,1," ");OLED_ShowString(2,1,"COMMAND_ERRO"); }Serial_RxFlag = 0;//准备接收下一个数据包}}}注意该实验的PA^1脚起始电平需要给高电平,不然会引起你的疑惑,为何上电就亮