文章目录
- 前言
- 一、GPIO_HAL库源码分析
- 1.1 初始化GPIO
- 1.2 HAL_GPIO_Init源码分析
- GPIO_InitTypeDef初始化结构体
- HAL_GPIO_Init函数
- 总结
前言
提示:这里可以添加本文要记录的大概内容:
例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。
一、GPIO_HAL库源码分析
1.1 初始化GPIO
void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET);/*Configure GPIO pin : PB5 */GPIO_InitStruct.Pin = GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
上面这个代码是初始化GPIOB的pin5引脚
在这里设置哪个引脚:GPIO_InitStruct.Pin = GPIO_PIN_5;
设置模式:GPIO_InitStruct.Mode,GPIO_MODE_OUTPUT_PP为推挽输出
除了推挽输出,他还有下面这些:
#define GPIO_MODE_OUTPUT_PP 0x00000001u /*推挽输出 */
#define GPIO_MODE_OUTPUT_OD 0x00000011u /*开漏输出 */
在这里:GPIO_InitStruct.Pull,我们是设置是否有上下拉电阻,他有以下这些值
#define GPIO_NOPULL 0x00000000u /*!< No Pull-up or Pull-down activation */
#define GPIO_PULLUP 0x00000001u /*!< Pull-up activation */
#define GPIO_PULLDOWN 0x00000002u /*!< Pull-down activation */
其中就是无上下拉电阻,上拉、下拉电阻的设置
在我们主函数的while循环如下:
while (1)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_SET);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_RESET);
HAL_Delay(500);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */
}
他就只是对GPIOB pin5输出高低电平点灯
我们主要需要看一下HAL_GPIO_Init函数是如何实现的
1.2 HAL_GPIO_Init源码分析
GPIO_InitTypeDef初始化结构体
GPIO_InitTypeDef这个结构体是用来对于某一个引脚进行初始化存储的结构体
他长下面这样:
typedef struct
{uint32_t Pin; /*!< Specifies the GPIO pins to be configured.This parameter can be any value of @ref GPIO_pins_define */uint32_t Mode; /*!< Specifies the operating mode for the selected pins.This parameter can be a value of @ref GPIO_mode_define */uint32_t Pull; /*!< Specifies the Pull-up or Pull-Down activation for the selected pins.This parameter can be a value of @ref GPIO_pull_define */uint32_t Speed; /*!< Specifies the speed for the selected pins.This parameter can be a value of @ref GPIO_speed_define */
} GPIO_InitTypeDef;
第一个成员为pin,pin这样表示
#define GPIO_PIN_0 ((uint16_t)0x0001) /* Pin 0 selected */
#define GPIO_PIN_1 ((uint16_t)0x0002) /* Pin 1 selected */
#define GPIO_PIN_2 ((uint16_t)0x0004) /* Pin 2 selected */
#define GPIO_PIN_3 ((uint16_t)0x0008) /* Pin 3 selected */
#define GPIO_PIN_4 ((uint16_t)0x0010) /* Pin 4 selected */
#define GPIO_PIN_5 ((uint16_t)0x0020) /* Pin 5 selected */
#define GPIO_PIN_6 ((uint16_t)0x0040) /* Pin 6 selected */
#define GPIO_PIN_7 ((uint16_t)0x0080) /* Pin 7 selected */
#define GPIO_PIN_8 ((uint16_t)0x0100) /* Pin 8 selected */
#define GPIO_PIN_9 ((uint16_t)0x0200) /* Pin 9 selected */
#define GPIO_PIN_10 ((uint16_t)0x0400) /* Pin 10 selected */
#define GPIO_PIN_11 ((uint16_t)0x0800) /* Pin 11 selected */
#define GPIO_PIN_12 ((uint16_t)0x1000) /* Pin 12 selected */
#define GPIO_PIN_13 ((uint16_t)0x2000) /* Pin 13 selected */
#define GPIO_PIN_14 ((uint16_t)0x4000) /* Pin 14 selected */
#define GPIO_PIN_15 ((uint16_t)0x8000) /* Pin 15 selected */
#define GPIO_PIN_All ((uint16_t)0xFFFF) /* All pins selected */
比如GPIO5,他变成二进制如下: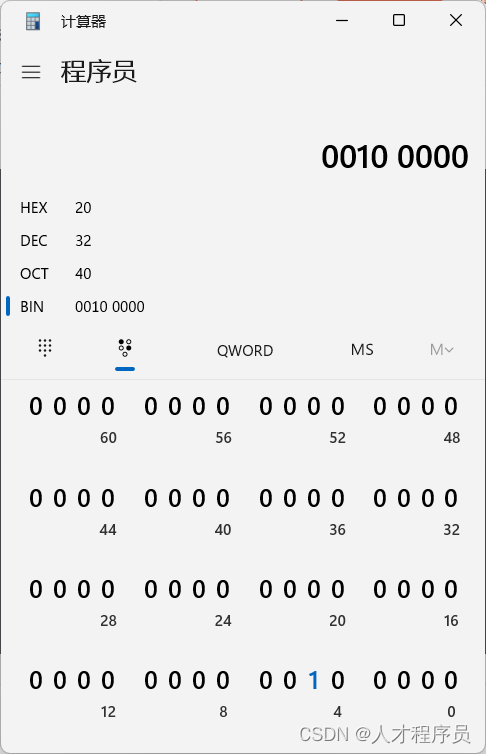
他的bit5为1,是不是和我们上两节课的寄存器联系起来了
如果没有看过的同学可以进入HAL库的本质是操作寄存器来进行学习
接下来看Speed成员:
他可以有以下取值:
#define GPIO_SPEED_FREQ_LOW (GPIO_CRL_MODE0_1) /*!< Low speed */
#define GPIO_SPEED_FREQ_MEDIUM (GPIO_CRL_MODE0_0) /*!< Medium speed */
#define GPIO_SPEED_FREQ_HIGH (GPIO_CRL_MODE0) /*!< High speed */
其中有低速,中速和高速
其中低速为2M,中速10M高速50M
HAL_GPIO_Init函数
这个函数有两个参数。一个为组号,另一个为初始化结构体
首先第一个参数,他有如下取值:
#define GPIOA ((GPIO_TypeDef *)GPIOA_BASE)
#define GPIOB ((GPIO_TypeDef *)GPIOB_BASE)
#define GPIOC ((GPIO_TypeDef *)GPIOC_BASE)
#define GPIOD ((GPIO_TypeDef *)GPIOD_BASE)
#define GPIOE ((GPIO_TypeDef *)GPIOE_BASE)
#define GPIOF ((GPIO_TypeDef *)GPIOF_BASE)
#define GPIOG ((GPIO_TypeDef *)GPIOG_BASE)
//。。。。。。
GPIOx_Base如下:
#define GPIOA_BASE (APB2PERIPH_BASE + 0x00000800UL)
#define GPIOB_BASE (APB2PERIPH_BASE + 0x00000C00UL)
#define GPIOC_BASE (APB2PERIPH_BASE + 0x00001000UL)
#define GPIOD_BASE (APB2PERIPH_BASE + 0x00001400UL)
这些就一起定义了一个组的基地址是什么
接下来我们看HAL_GPIO_Init源码:
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
{uint32_t position = 0x00u;uint32_t ioposition;uint32_t iocurrent;uint32_t temp;uint32_t config = 0x00u;__IO uint32_t *configregister; /* Store the address of CRL or CRH register based on pin number */uint32_t registeroffset; /* offset used during computation of CNF and MODE bits placement inside CRL or CRH register *//* Check the parameters */assert_param(IS_GPIO_ALL_INSTANCE(GPIOx));assert_param(IS_GPIO_PIN(GPIO_Init->Pin));assert_param(IS_GPIO_MODE(GPIO_Init->Mode));/* Configure the port pins */while (((GPIO_Init->Pin) >> position) != 0x00u){/* Get the IO position */ioposition = (0x01uL << position);/* Get the current IO position */iocurrent = (uint32_t)(GPIO_Init->Pin) & ioposition;if (iocurrent == ioposition){/* Check the Alternate function parameters */assert_param(IS_GPIO_AF_INSTANCE(GPIOx));/* Based on the required mode, filling config variable with MODEy[1:0] and CNFy[3:2] corresponding bits */switch (GPIO_Init->Mode){/* If we are configuring the pin in OUTPUT push-pull mode */case GPIO_MODE_OUTPUT_PP:/* Check the GPIO speed parameter */assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));config = GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_PP;break;/* If we are configuring the pin in OUTPUT open-drain mode */case GPIO_MODE_OUTPUT_OD:/* Check the GPIO speed parameter */assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));config = GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_OD;break;/* If we are configuring the pin in ALTERNATE FUNCTION push-pull mode */case GPIO_MODE_AF_PP:/* Check the GPIO speed parameter */assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));config = GPIO_Init->Speed + GPIO_CR_CNF_AF_OUTPUT_PP;break;/* If we are configuring the pin in ALTERNATE FUNCTION open-drain mode */case GPIO_MODE_AF_OD:/* Check the GPIO speed parameter */assert_param(IS_GPIO_SPEED(GPIO_Init->Speed));config = GPIO_Init->Speed + GPIO_CR_CNF_AF_OUTPUT_OD;break;/* If we are configuring the pin in INPUT (also applicable to EVENT and IT mode) */case GPIO_MODE_INPUT:case GPIO_MODE_IT_RISING:case GPIO_MODE_IT_FALLING:case GPIO_MODE_IT_RISING_FALLING:case GPIO_MODE_EVT_RISING:case GPIO_MODE_EVT_FALLING:case GPIO_MODE_EVT_RISING_FALLING:/* Check the GPIO pull parameter */assert_param(IS_GPIO_PULL(GPIO_Init->Pull));if (GPIO_Init->Pull == GPIO_NOPULL){config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_FLOATING;}else if (GPIO_Init->Pull == GPIO_PULLUP){config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_PU_PD;/* Set the corresponding ODR bit */GPIOx->BSRR = ioposition;}else /* GPIO_PULLDOWN */{config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_PU_PD;/* Reset the corresponding ODR bit */GPIOx->BRR = ioposition;}break;/* If we are configuring the pin in INPUT analog mode */case GPIO_MODE_ANALOG:config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_ANALOG;break;/* Parameters are checked with assert_param */default:break;}//code..................
}
这些功能太复杂,我们只分析怎么把传入的参数变成输出引脚
他根据mode,来进行具体的设置:
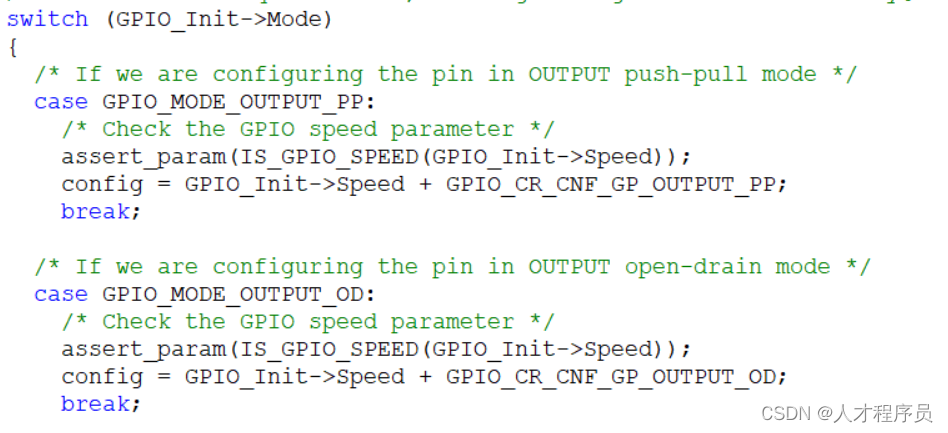
然后他把数据存储到了config变量中

接下来我们看MODIFY_REG,修改寄存器,他需要修改指定寄存器,并且其他寄存器不被破坏
#define MODIFY_REG(REG, CLEARMASK, SETMASK) WRITE_REG((REG), (((READ_REG(REG)) & (~(CLEARMASK))) | (SETMASK)))
在这里WRITE_REG((REG), (((READ_REG(REG)) & (~(CLEARMASK))) | (SETMASK)))他要写寄存器REG
他写什么呢,首先把寄存器的值读出来,& (~(CLEARMASK))清除掉某些位 | (SETMASK)设置某些位,这样就达到了修改寄存器且不破坏其他位
在这里:configregister = (iocurrent < GPIO_PIN_8) ? &GPIOx->CRL : &GPIOx->CRH;他会去确定某个寄存器
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。