之前在https://www.yuque.com/treblez/qksu6c/wbaggl2t24wxwqb8?singleDoc# 《Elasticsearch: 非结构化的数据搜索》我们看了ES的设计,主要侧重于它分布式的设计以及LSM-Tree,今天我们来关注算法部分:如何进行检索算法的设计以及如何加速倒排索引。然后看看topk的面试热门题如何解决。
状态检索:bitmap的哈希函数公式
bitmap的最优hash函数的计算公式为:
k = (m/n)*ln2
其中m为bit数组的长度,n为要存入的对象个数。
加速倒排索引和Roaring Map
倒排索引由key和posting list构成,posting list可以用很多结构实现,比如红黑树、跳表、链表等。
posting list往往会用于归并过程(join),这里我们很容易想到spark的join策略:嵌套循环、排序归并和哈希归并。他们的复杂度分别是m*n,m+n和n(较大)。
因为posting list天生有序,所以这里主要的策略在于加速排序归并和哈希归并过程。
排序归并可以用跳表和红黑树,双指针相互二分查找将每次搜索的复杂度降低到logk。
Lucene和Elasticsearch就采用了这种方法。
同样,posting list也可以使用哈希表和位图来实现。
普通的哈希表和位图很简单,不再赘述。更广泛使用的是Roaring Bitmap(压缩位图)。
Roaring Bitmap简单来说,就是用高16位哈希到桶的编号,低16位再哈希到bitmap,这样如果元素稀疏的话,就能节省没有bitmap的桶的空间。
低16位桶的数量如果少于4096,那么bitmap就使用数组容器来节省空间,否则使用位图容器。
倒排索引的更新
倒排索引的更新主要有如下方案:
- Double Buffer双缓冲 + 原子swap
- 全量索引+增量索引
增量索引的合并方案:
- 全量合并
- 再合并(归并合并)
- 滚动合并(加入索引级别)
精准打分和非精准打分
精准打分就是采用堆排序算法进行排序。
复杂度是n+klogn。
非精准打分一般用在召回阶段,也就是排序的第一步,一般采用的打分算法有tf-idf和bm25两种。
那么非精准的打分如何实现呢?
- 静态质量得分截断(比如使用pagerank)
- 词频得分打分截断(使用胜者表解决相同文档得分不同的情况,选出多于k个结果)
- 使用分层索引,建立精准索引和非精准索引,不足k个精准结果去非精准索引中补齐
日志的分布式拆分
索引的拆分方式:
- 基于文档进行拆分
- 基于前缀进行拆分
※最近的k个人和k最邻近
KNN - 检索最近的k个设施(低维空间的k最近邻)- 四/八叉树、前缀树和k-d树
这两个问题都可以用Geohash编码,但是k最邻近设施比k个人更加复杂。
最近的k个人只需要查找编码的附近8个区域,就可以转换到非精确打分 – > 精确打分的流程中,但是k最邻近则需要不断扩大搜索范围,每次扩大一个搜索层级进行搜索。
为了利用到之前搜索的结果,k最邻近可以使用四叉树(二维),前缀树、八叉树(三维)和k-d树。
检索最近的k个加油站、检索相似文章都是这类问题,相似文章在存储中表示为n维向量中的一个点,也会变成k最邻近设施的问题。
ANN - 过滤相似文档(高维空间的k最近邻)- 局部敏感哈希
当向量的维度太高的时候,k-d树的复杂度会变得很高。这时候,我们会采用局部敏感哈希的方案来处理:
对于高维空间,局部敏感哈希会随机生成n个超平面,每个平面都会将高维空间划分成两个部分,分别编码为0和1,如果有两个点的哈希值的海明距离比较小,那么我们就认为它们邻近。
局部敏感哈希的问题在于它无法保存每个维度的权重信息,Google提出了SimHash来解决这个问题。
ANN - 有权重的高维空间k最近邻-SimHash
simHash会将哈希函数编码中的0和1转换为-1和1,并且乘上权重值,最后将所有关键词的哈希值相加。最后将大于0的值变为1,小于等于0的值变为0.
那么如何在这个基础上进行相似检索呢?
简单的方法是将每一个比特位都当作索引,在召回时分别考虑自己的每一个比特位,进行召回,但是这样产生的数据量很大,google提出的解决方案是抽屉原理:将哈希值平均切为4段,如果两个哈希值的比特位差异不超过3个(海明距离小于等于3),那么至少有一个段的比特位完全相同。
因此,我们可以将每一个文档都根据比特位分为4段,建立4个倒排索引,然后进行召回。
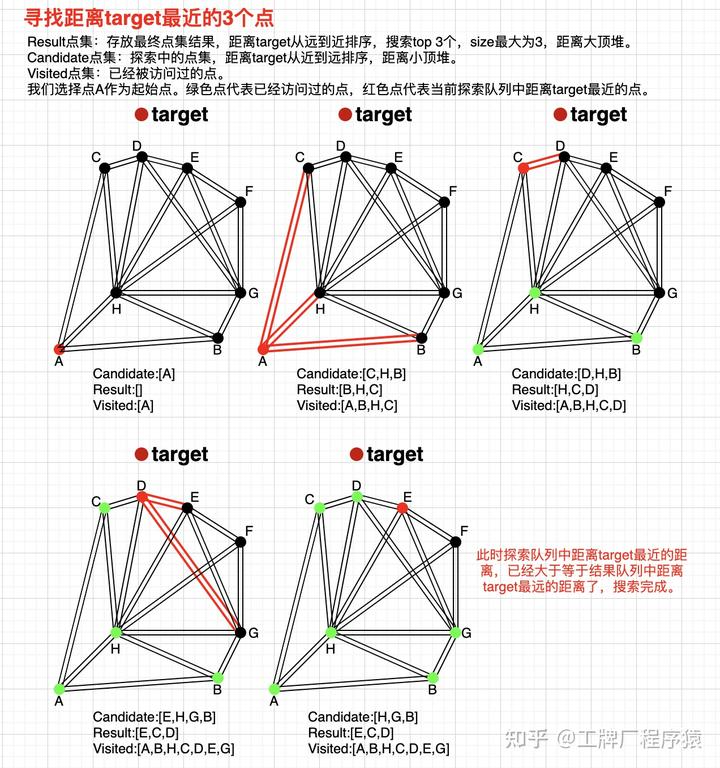
ANN - HNSW
Delaunay图可以保证图中所有的点都有点与之相连,且能保证整张图的边的数量尽可能的少。但实际上,NSW并不是直接采用Delaunay图。Delaunay图有个缺点,它没有高速公路机制,也就是说所有的图节点都只会跟自己相近的点建立连接,如果需要抵达一个距离较远的点,则时间复杂度较高。而不管是构建图索引的时候,还是在线检索的时候,都需要进行临近搜索,直接采用Delaunay图就会导致离线索引构建以及在线serving的时间复杂度不理想。
NSW的图结构是近似的Delaunay图,与Delaunay图不同的是,他有高速公路机制。如图所示。
拍照识花–乘积量化
上面的ANN和KNN算法的问题在于,它们只能用在表面特征的相似性上,而不是本质的相似性上。
在需要本质相似性的领域,比如图像处理上,需要KMeans来进行聚类。
K-means可以将k个聚类id作为倒排索引的key来建立倒排索引。
当要查询一个点邻近的点时,计算该点和所有聚类中心的距离,就可以进行topK的查询。
为了优化存储空间,可以用乘积量化技术进行压缩。
LevelDB的lsm-tree
LevelDB将内存数据分为memtable和immutable table两部分。这两部分数据都使用跳表存储。
当memtable的数据达到存储上限时,将会被转换为immutable table,并且生成一个新的memtable,新的memtable被用来支持新数据的写入和读取。immutable只读,不需要加锁就能写入磁盘。
LevelDB使用LCS(https://www.yuque.com/treblez/qksu6c/wbaggl2t24wxwqb8#seDXd)进行合并,从第一层开始使用归并排序后的结果。
SSTable分为数据存储区(data block)和数据索引区(index block)。
数据索引区从上到下又分为:
- 过滤器数据区
- 过滤器索引区
- 数据索引区 对数据存储区的block进行索引 格式 key - offset - size
- foot block 记录index block和meta index block的大小
SSTable的检索过程和列式存储很像,这里的过滤器都是bloom filter。
使用缓存加速检索SSTable文件的过程
如果在二分查找时,将data block和index block分两次io读入内存,那么开销显然非常大,为了减少这里的开销,LevelDB设计了table cache和block cache两个索引。
table cache存储最近使用的SSTable的index block,block cache存储最近使用的data block。这两个缓存都使用LRU策略替换。
levelDB的一个问题在于如果immutable table还没有写入磁盘,memtable满了,会导致阻塞,google的rocksDB允许创建多个memtable解决了这个问题。
B+树适用于随机读很多,但是写入很少的场景;lsm树进行了大量写操作优化,效率会更高。
在LSM-Tree的L0写入时,限制文件数量,L1及以上则要限制容量大小;写入时会根据beg和end限制本层的一个sstable文件在下一层对应的sstable文件数小于十个,如果达到了十个就会结束文件的生成。
top-k + lsm-tree
TOP-K一直是面试的热门题目,题目的意图一般是考察小/大顶堆或者快速选择算法。
我们来考虑更复杂的情况:
- 有插入和删除的top-k中,什么样的数据结构/算法是最合适的?
- 面对海量数据的存储,在不使用swap mem的情况下,怎样实现top-k?
- 用ES怎么实现top-k?复杂度如何?
- 流式数据的top-k又如何实现?
https://blog.quarkslab.com/mongodb-vs-elasticsearch-the-quest-of-the-holy-performances.html