2023-2024年机器人十大前沿技术
1. 具身智能与垂直大模型
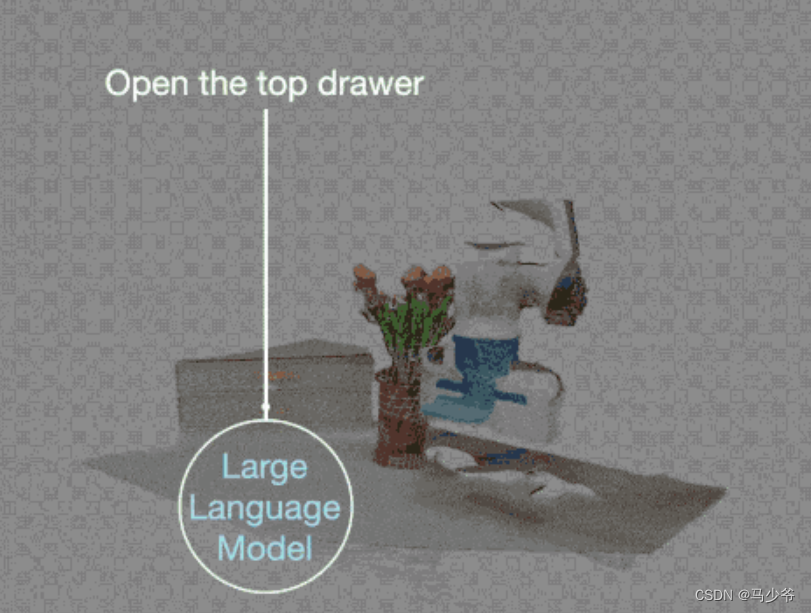
具身智能是指拥有自主感知、交互和行动能力的智能体,能够与环境进行实时互动,从而实现对环境的理解和适应。
“大模型”是指在深度学习和人工智能领域中,使用大量参数和数据进行训练的复杂神经网络模型。在一些垂直领域,如医疗领域、法律咨询、金融分析等领域具有重要的潜在应用。
将大模型与具身智能相结合,与文本、图像、音频等多模态数据的联合分析,可创造更强大、更智能的机器人系统;在人机交互领域,结合知识性和适合标准化的场景与大模型紧密融合,在机器人聊天、陪护、助理、科教等领域,使得机器人更好地应对各种情境和复杂的环境,有望获得规模化良好应用。
核心技术包括:智能体环境感知与建模、智能体自主决策与规划、人机交互、群控协作、机器学习与强化学习等技术。
2. 人形与四足仿生机器人
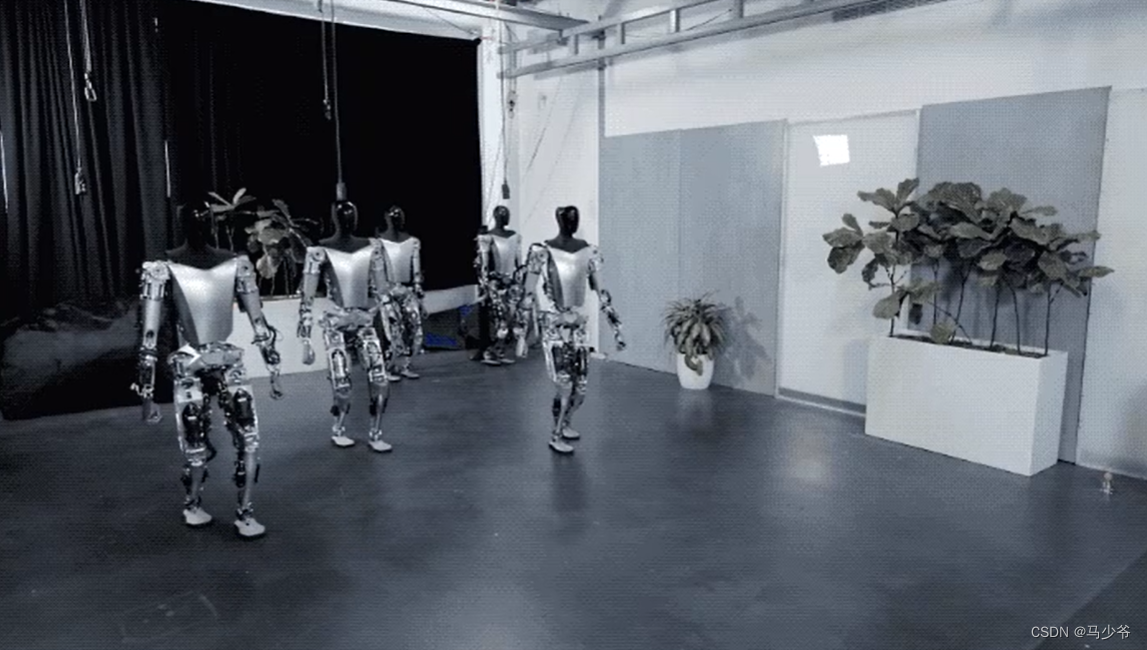
“仿生机器人”是指受生物学原理和生物体结构启发,设计和制造的机器人,以模仿生物的运动、行为和外貌,实现更自然、更适应性强的性能。包括四足机器人、人形机器人、仿鱼水下机器人、仿生扑翼机器人等。
伴随着高性能关节驱动器、运动算法、机器视觉、灵巧操作以及大模型等技术快速发展,使得四足、人形等仿生机器人落地成为现实。
随着特殊服役、工业生产、商业服务、家庭服务等领域的潜在需求,相关技术攻关和新品发布十分活跃。

3. 三维感知模型与多模态信息融合
三维感知模型与多模态信息融合将来自不同传感器和数据源的多种信息进行整合,可更全面、准确地理解环境的特征。融合信息涵盖图像、点云、声音等不同类型的数据。
多模态信息融合可克服单一传感器存在的局限性,提供更全面、鲁棒的信息,有助于在机器人导航、人机交互、环境监测、自动驾驶等取得更好性能;同时,面临传感器不一致性、数据同步、信息不完整等挑战。
三维感知模型与多模态信息融合与具身智能、垂直大模型的协同和融合,将进一步扩大机器人应用范围。
核心技术包括:结构光和立体视觉、三维物体检测和分割、多模态特征提取、融合模型设计等。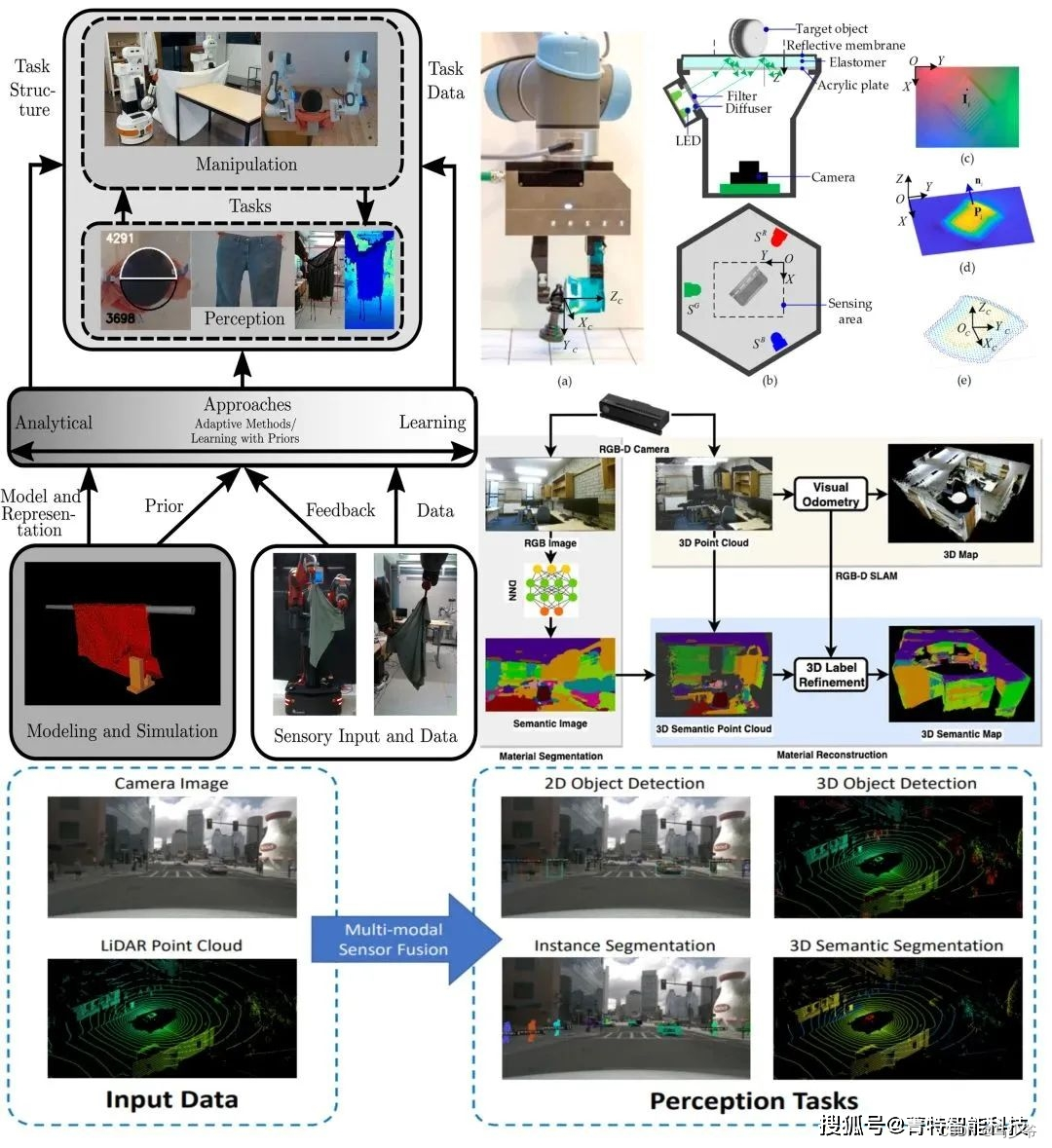
4. 机器人新型核心零部件与灵巧操作
减速器、伺服电机及驱动器、控制器作为传统机器人的三大核心零部件,我国已基本实现国产化,并呈现从中低端逐步往高端零部件发展的趋势。
伴随着MEMS、传感器等技术的快速发展,视觉、力觉传感器、高速/高功率的微小型电机/液压驱动器作为机器人实现智能化、数字化、柔性化的“敲门砖”,逐渐成为新一代机器人重要核心零部件。
机器人模块化趋势不断凸显,近些年刚柔耦合的灵巧手、微小执行器、微型伺服电缸、移动模组等不断出现,有望成为新一代机器人的重要核心零部件。


5. 脑机接口、生肌电一体化与微纳机器人
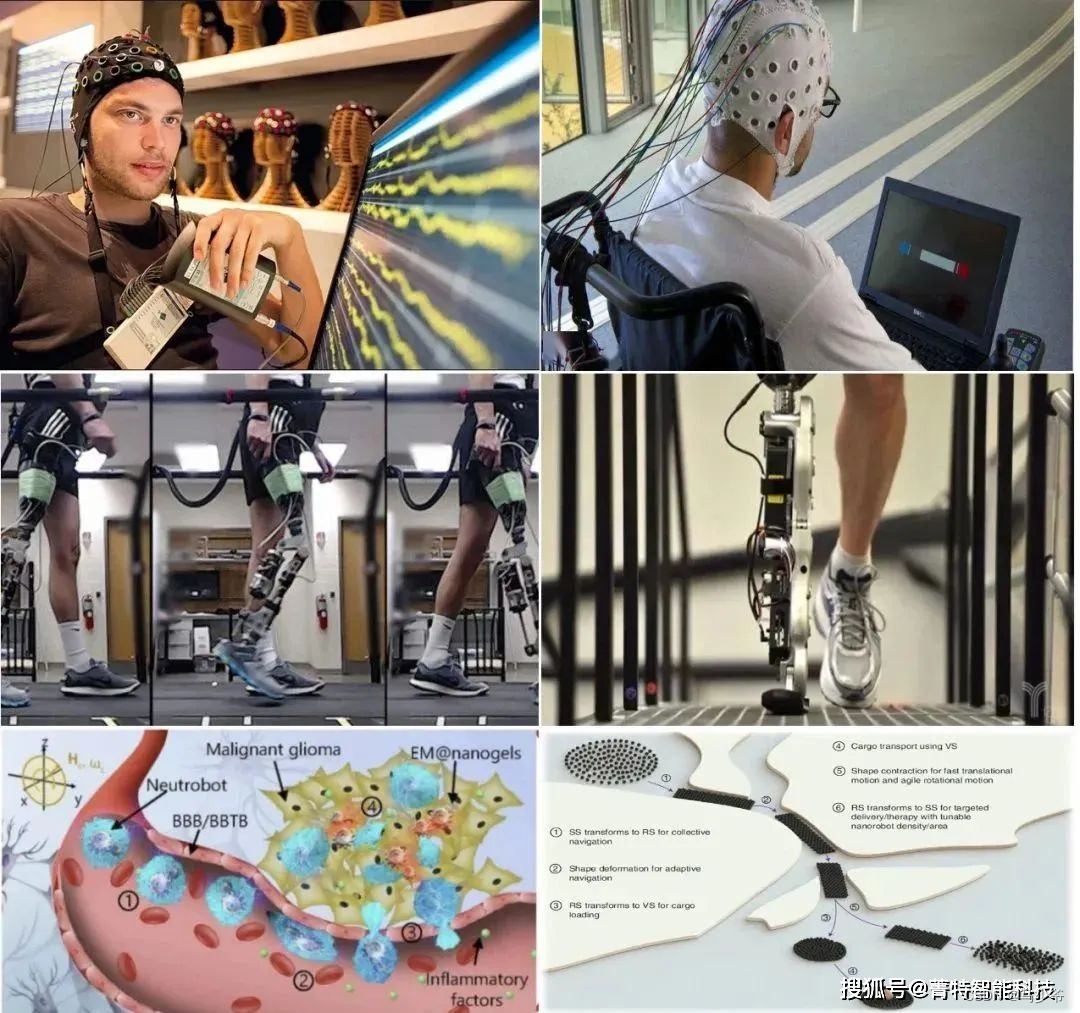
脑机接口是一种直接连接人类或动物大脑与外部设备,实现脑与设备之间信息交流的技术。将机器人与脑部认知相结合,应用于残障、医疗、航空航天、教育、娱乐等领域,具有广泛的应用前景。
生机电一体化是近年来快速发展的前沿科学技术,通过将生物体的神经信息获取、处理和传递的机制与电子技术相结合,创造出更紧密连接人体和机器的交互模式。
微纳机器人:具备微小、精准、靶向、低损伤、超高精度可控等优点,被认为是未来对抗人体疾病的理想武器之一。在生物医学、组织工程、微电子技术等领域具有广阔应用前景。
核心技术包括:DNA折纸技术、微纳操作、亚微米级微操作台、智能化细胞克隆、新材料与微电子技术等。
6. 医疗与康复机器人
医疗机器人通过结合机器人技术和医疗专业知识,为医生提供更精确、稳定和精细的手术控制,从而改善手术过程,减少创伤和恢复时间,同时也为医生提供更多的信息。在骨科手术、脑外科手术、穿刺介入、牙科、眼科、可穿戴式等医疗操作中得以广泛运用。
康复机器人凭借先进的传感技术和精确的运动控制,可协助偏瘫患者恢复运动能力,或满足永久性损伤患者日常生活需求,提升人们的生活质量。
随着智能图像导航、机器人力位控制、高精度运动控制、遥操作等技术快速发展,医疗与康复机器人将变得更加智能化、自主化。
7. 商业服务机器人
室外商业服务机器人主要应用于无人配送、无人巴士/出租、道路清洁、无人巡检等服务场景,具有智能化程度高、运维成本低、可靠性高等特点。
室内商业服务机器人主要应用于室内环境中的导航服务、商业清洁、餐饮配送、无人售货、无人餐厅等服务场景。
伴随着激光雷达、伺服电机等零部件的价格下降,自主导航技术的成熟,在庞大市场需求下,无人配送成为发展热点,无人配送机器人呈现由室内向室外转变的趋势。
核心技术包括:环境感知、地图构建、定位与路径规划、动态识别、实时避障、机器视觉、柔顺抓取、人机交互、智能决策与控制等。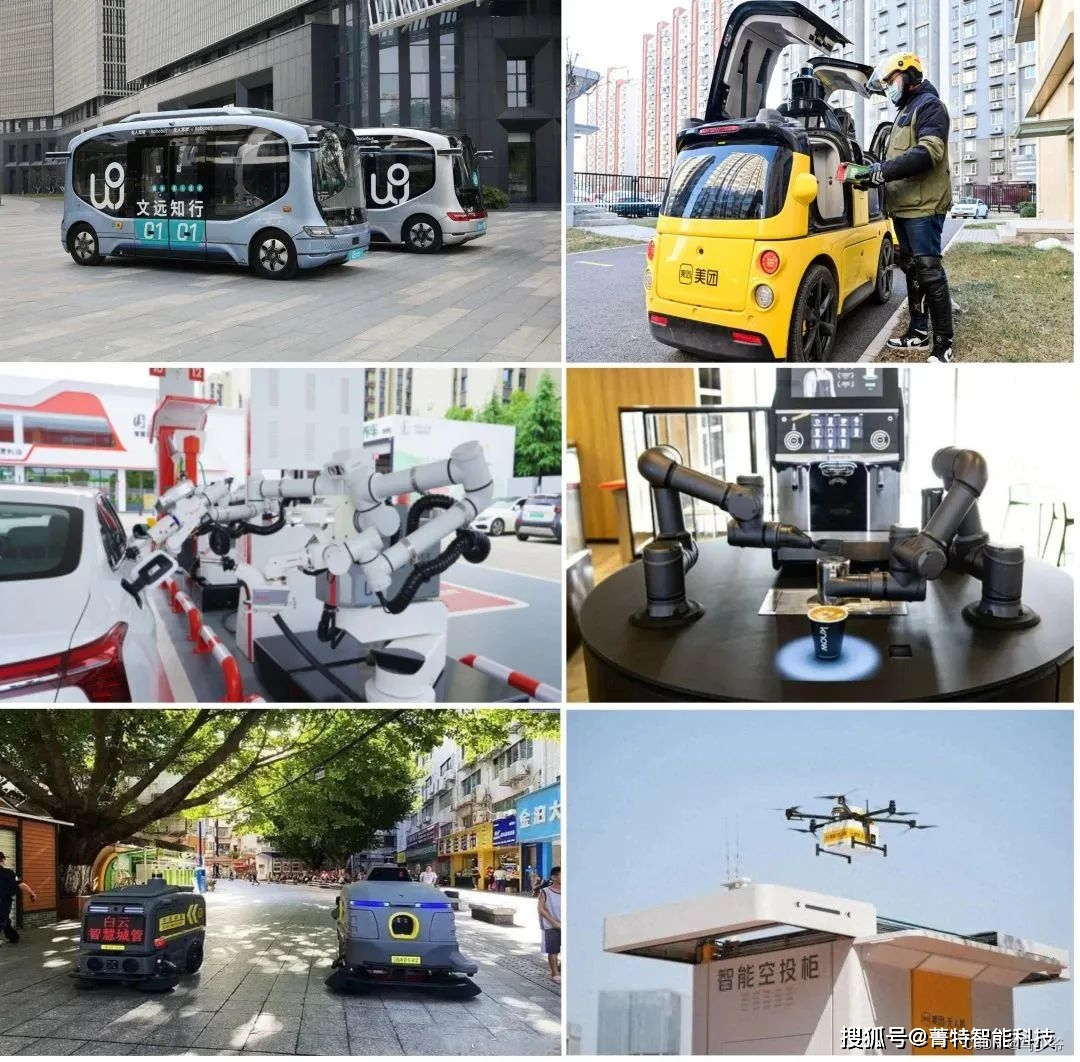
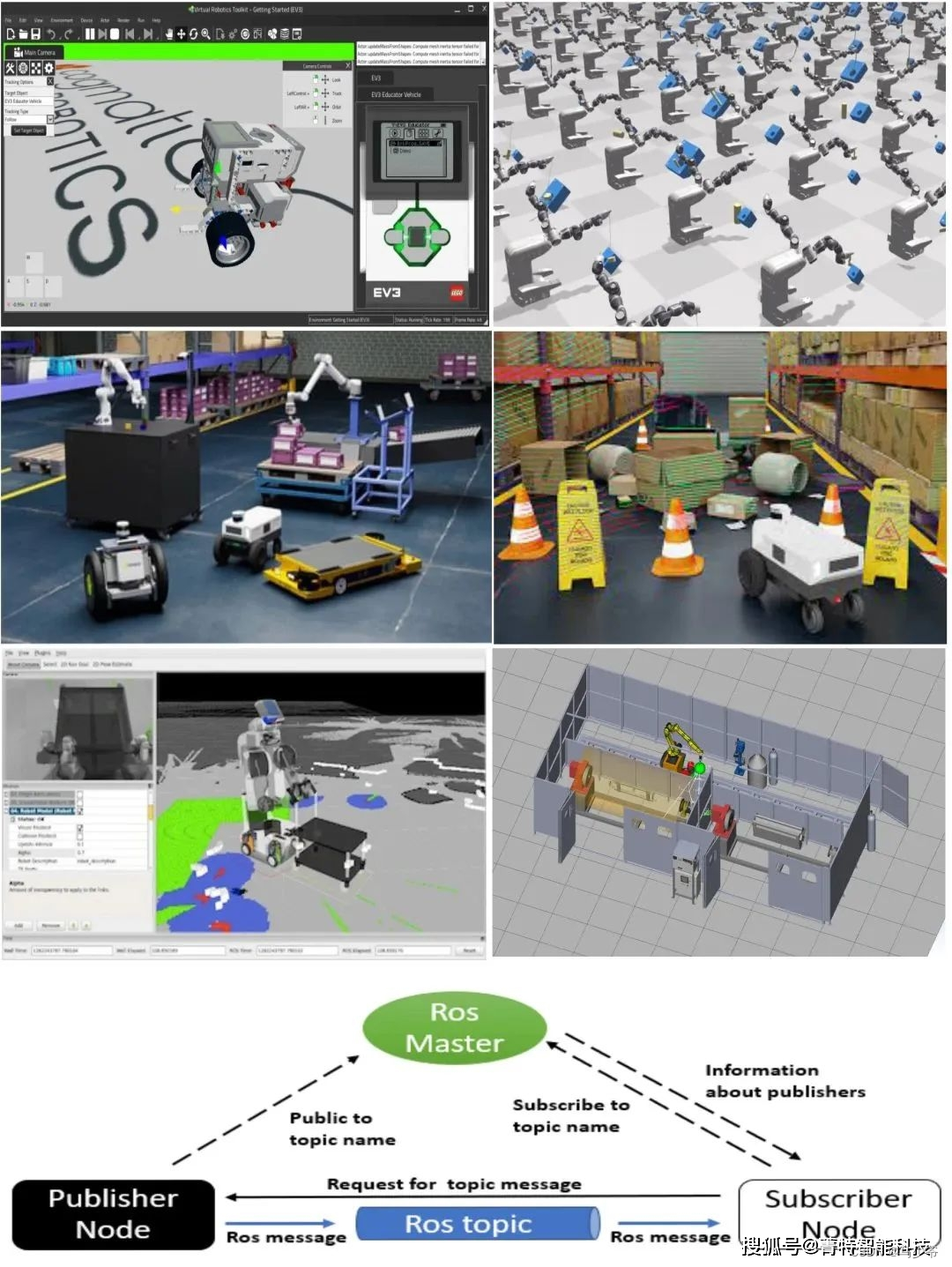
8. 机器人操作系统/云平台
机器人操作系统包括硬件抽象、底层设备控制、常用功能实现、进程间消息和数据包管理等功能。根据不同行业需求,衍生出不同场景的机器人操作系统,如面向教育科研、商业服务、无人驾驶、工业智能等场景的操作系统或平台。
机器人操作系统的发展推动机器人标准化、模块化,实现物理空间和数字空间的数字孪生,促进机器人大规模应用。
云服务机器人是指将机器人的核心计算和智能部分部署在云端服务器,借助云计算技术提供更大的计算能力和资源,以实现更强大、更高效的数据处理和应用。“云端大脑+本地机体”或“云端服务”机器人将成为规模化推广与应用的重要模式之一。
核心技术包括:机器人操作系统内核及通信协议栈、机器人运动控制与动态轨迹规划、机器人自学习、分布式计算、服务化架构、服务器监控与管理等。
9. 群体机器人技术
群体机器人技术是指多台机器人在一个团队或群体中协同工作、交流和协作的技术。机器人可通过相互通信、信息共享和协同行动,实现集体智能,以完成复杂任务和目标。
群体机器人技术的发展受益于多领域的知识,包括分布式系统、协同算法、Agent技术、通信技术等,促进机器人之间实时交流、协调行动,并在不同环境下适应变化。
群体机器人技术的应用领域广泛,包括但不限于军事、交通、巡检、无人机等领域。随着人工智能的发展,集群智能作为人工智能的分支,将得到越来越多的应用,有望在机器人等领域创造出新的应用和创新。
核心技术包括:群体动力学建模、群体仿真、感知和信息共享、定位与导航、通信协议和拓扑、任务分配与协作等。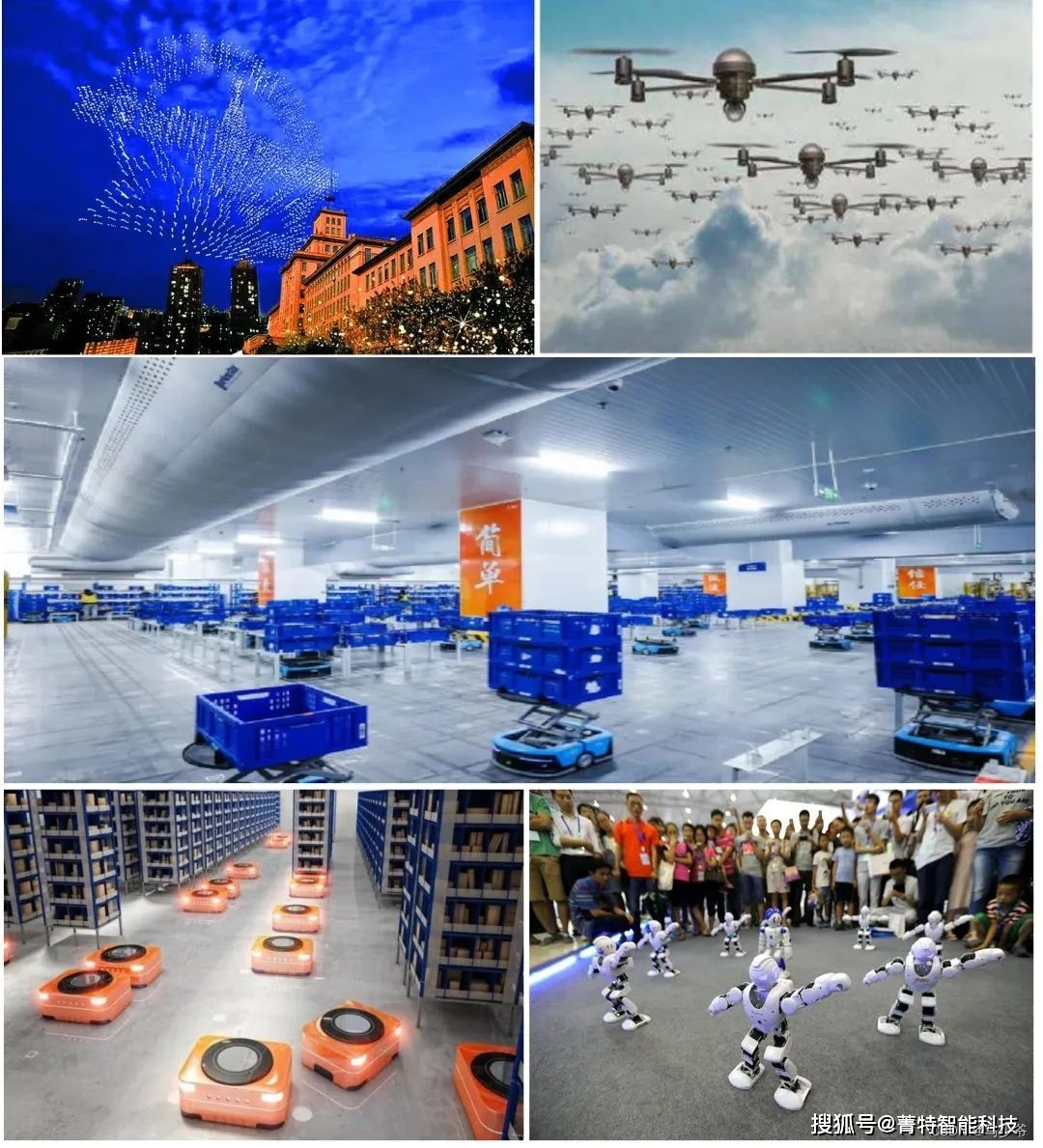
10.特殊场景服役机器人—军事、消防、农业、核工业、太空等领域
特殊场景服役机器人是指在特定环境或情况下执行任务的机器人。这些机器人被设计和配置用于应对特殊的工作环境、任务需求或挑战。
在消防救援、电力勘测、农业、建筑、核工业、反恐防暴、国防安全、空间探测等领域具有巨大需求。
特殊场景服役机器人的设计和应用,需考虑特殊环境下的安全性、稳定性、通讯能力以及适应性。
核心技术包括:特种材料、防水、防爆、防辐射、极压适应、水下通信、生物相容性、极端温度适应、威慑和防卫等。