目录
0 参考出处
1 定义
2 各种电机优势比较
2.1 有刷与无刷比较
2.2 交流与直流比较
2.3 内转子与外转子比较
2.4 低压BLDC的一些优点
3 基本原理
3.1 单相无刷电机
3.2 三相无刷电机
4 驱动方法
4.1 六步换相控制
4.2 正弦波控制
5 转子位置信息的获取
5.1 霍尔传感器
5.2 反电动势
0 参考出处
【仅作自学记录,不出于任何商业目的。如有侵权,请联系删除,谢谢!】
- 文段:
- 维基百科直流无刷电动机
- 瑞萨电子官网何谓BLDC电机 | Renesas
- 视频:
- 广州大学《机电一体化》课程视频无刷直流电动机的特点、结构、原理和控制
- 德州仪器培训视频深入理解无刷直流电机(BLDC)原理以及控制
- EEWORLD大学堂matlab与电机控制(非常好)
- b站up主爱上半导体视频无刷直流电机的工作原理
- 油管How To MechatronicsHow Brushless Motor and ESC Work and How To Control them using Arduino - YouTube
1 定义
无刷直流电动机(BLDC,即Brushless DC Motor),也称为电子换向电动机,是一种没有电刷和换向器的电动机,根据转子永磁体位置调整定子电流以产生相应转矩。知乎博主佟明昊一针见血地指出,其可定义为反电势为梯形波的永磁同步电机。无刷电机系统的结构通常类似于永磁同步电机 (PMSM,即Permanent Magnet Synchronous Motor)。
【BLDC(无刷直流电机)和PMSM(永磁同步电机)】
关于二者区别,可参看:电子发烧友网简要分析永磁无刷直流电机与永磁同步电机的差别、知乎彻底搞懂BLDC与PMSM的区别、航模电机为什么多用BLDC,而不是PMSM?,查阅资料后个人感觉不用太纠结于此。
一般来说,BLDC电机的定子绕组通常采用集中整距绕组,具有梯形波反电势;而PMSM电机则往往使用分布短距绕组或者正弦绕组,具有正弦波反电势。【复习集中/分布绕组:视频电机集中/分布式绕组区别、知乎文章集中绕组和分布绕组区别?(集中-梯形-扭矩大-但谐波多损耗大;分布-正弦-损耗小)】但是,集中整距绕组不一定就是BLDC,而分布短距绕组大概率是PMSM。因为反电势波形的制造比较复杂,集中整距绕组的电机不一定产生梯形波反电势,而分布短距绕组更容易制造出正弦波反电势。

2 各种电机优势比较
通过比较,了解为何选择BLDC电机。

| 特性 | BLDC电机 | 永磁有刷直流电动机 | 交流感应电动机 |
| 定子 | 多相绕组 | 永磁 | 多相绕组事 |
| 转子 | 永磁 | 绕组 | 线绕组或笼型绕组 |
| 转子位置传感器 | 需要 | 不需要 | 不需要 |
| 电滑动接触火花 | 无 | 有,换向器与电刷 | 无,或可能有集电环 |
| EMC干扰 | 较低 | 高 | 低 |
| 可闻噪声 | 较低 | 高 | 低 |
| 电子控制器 | 必需 | 不是必需,调速时需要 | 不是必需,调速时需要 |
| 使用电源 | DC | DC | AC |
| 使用电压范围 | 高,受功率器件耐压限制 | 较低,受换向器耐压限制 | 高 |
| 机械特性 | 接近线性 | 线性 | 非线性 |
| 起动转矩倍数 | 较高 | 较高 | 较低 |
2.1 有刷与无刷比较
与有刷直流电机相比,无刷电机具有多项优势:高扭重比(torque to weight ratio)、更大的每瓦扭矩、高可靠性、低噪音、通过消除电刷和换向器侵蚀来延长使用寿命、消除换向器火花,以及全面减少的电磁干扰(EMI)。由于转子上没有绕组,因此它们不会受到离心力的影响,并且由于绕组由外壳支撑,因此可以直接传导冷却,而不需要通过电机内部的气流进行冷却。这反过来意味着电机的内部可以完全封闭,以防止灰尘或其他异物进入。

| 特性 | BLDC电机 | 有刷直流电机 |
| 换向 | 根据霍尔位置传感器进行电子换向 | 采用电刷换向 |
| 维护 | 由于无电刷而较少需要 | 需要定期维护 |
| 寿命 | 较长 | 较短 |
| 转速/转矩特性 | 平坦(在负载额定的条件下,可在所有转速下正常 工作) | 中等平坦(转速较高时,电刷摩擦增加,因此减少了有用转矩) |
| 效率 | 高(没有电刷两端的压降) | 中等 |
| 输出功率/体积 | 高(由于出众的散热特性而缩小了体积。由于BLDC电机将绕组放在了连接至电机外壳的定子上,因而散热更好) | 中等/低(电枢产生的热量散发到气隙中,这使气隙中的温度升高,限制了输出功率/体积规范) |
| 转子惯性 | 小,因为转子上有永磁体 这改进了动态响应 | 较大的转子惯性限制了动态特性 |
| 转速范围 | 较高(无电刷/换向器施加的机械限制) | 较低(有电刷的机械限制) |
| 产生的电子干扰 | 低 | 电刷中的电弧会对附近设备产生电磁干扰 |
| 制造成本 | 较高(由于其中有永磁体,制造成本较高) | 低 |
| 控制成本 | 复杂且昂贵 | 简单且便宜 |
| 控制要求 | 要保持电机运转,始终需要控制器 可使用这一控制器控制转速 | 固定转速不需要控制器,只有需要改变转速时才需要控制器 |
2.2 交流与直流比较
| 特性 | BLDC电机 | 交流感应电机 |
|---|---|---|
| 转速/转矩特性 | 特性曲线平坦,在负载额定的条件,可在所有转速下正常工作。 | 特性曲线非线性,低转速下转矩也低。 |
| 输出功率/体积 | 功率密度高,由于转子采用永磁体,体积较小 | 功率密度中等,由于定子和转子都有绕组,输出功率与体积之比低于BLDC。 |
| 转子惯性 | 惯性小,动态特性较佳 | 惯性大,动态特性较差 |
| 起动电流 | 额定值,无需专门的启动电路。 | 大约是额定值的7倍,应谨慎选择合适的启动电路。通常使用星型-三角形启动器。 |
| 控制要求 | 要保持电机运转,始终需要控制器。还可使用这一控制器控制转速。 | 固定转速不需要控制器,只有需要改变转速时才需要控制器。 |
| 差频 | 定子和转子磁场的频率相等 | 转子运行频率低于定子磁场。差频随着电机负载的增大而增加。 |
2.3 内转子与外转子比较
就BLDC自身结构而言,可分为内转子和外转子两种:

-rotor:转子;stator:定子;permanent magnet:永磁体;coil windings:线圈绕组;bearing:轴-
内转子电机的优势在于转子的转动惯量低,散热非常快,在大多数工业应用中广泛使用。外转子电机的定子位于内侧,转子包括一个能够旋转外壳,磁体安装在外壳上,定子发热线圈与环境隔绝,散热相对较慢。由于转子的转动惯量转矩很大且很难控制转子外壳的平衡,所以外转子电机不适用于旋转速度很高的模式。但外转子电机可以拥有更短的结构并通常具备更小的停转转矩,而由于在相同的磁力下,它的转子直径更大,因此其转矩也更大。
2.4 Delta型与Y型定子绕向比较

Delta型绕组电机在低速时提供低扭矩(Lower torque at low speed),但可以提供更高的最高速度(Higher top speed);Y型绕组在低速时可提供高扭矩(Higher torque at low speed),但最高速度不高(Lower top speed)。Delta型绕组结构允许含有奇次谐波电流在电机内循环,而Y型绕组并不包含寄生电流可流动的闭环结构(Immune to parasitic currents),从而防止额外损耗,故Y型绕组效率更高。除了Y型绕组较高阻抗外,从控制器的角度来看,不管是Y型还是Delta型连接,电机的驱动方式都是一样的。
2.4 低压BLDC的一些优点
- 集成电路功能集成: 板载小型封装、低导通电阻功率 MOSFET、电流检测放大器、温度传感器、集成 DC-DC、LDO 甚至电机控制器;
- 保护功能: 逐周期过流保护、过热保护、失速检测、自动重启等;
- 更安全:低电压运行;
- 更易制造:电机尺寸更小,需要工艺技术较低的,节省成本;
- 通用电压工作范围: 由于电机额定电压为 24V,同样的解决方案可用于 110V / 220V 线电压产品,满足全球各地的需求。
3 基本原理
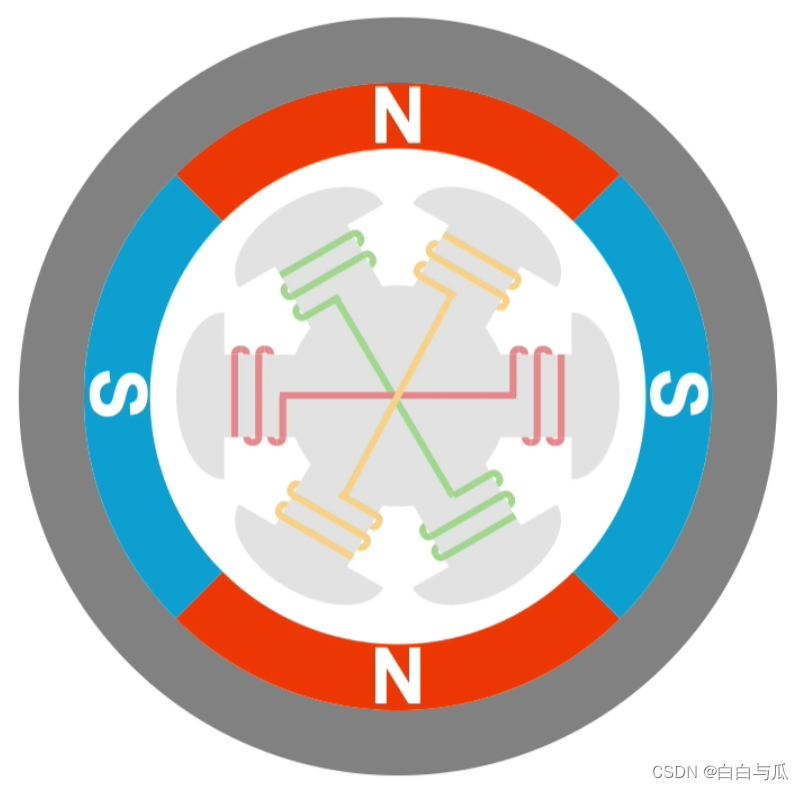
BLDC使用电子控制器将直流电流转换到电机绕组,通过控制电流导通关断产生有效的空间旋转磁场,驱使永磁转子跟随磁场旋转。控制器调整直流脉冲的相位和振幅,以控制电机的速度和扭矩。
3.1 单相无刷电机
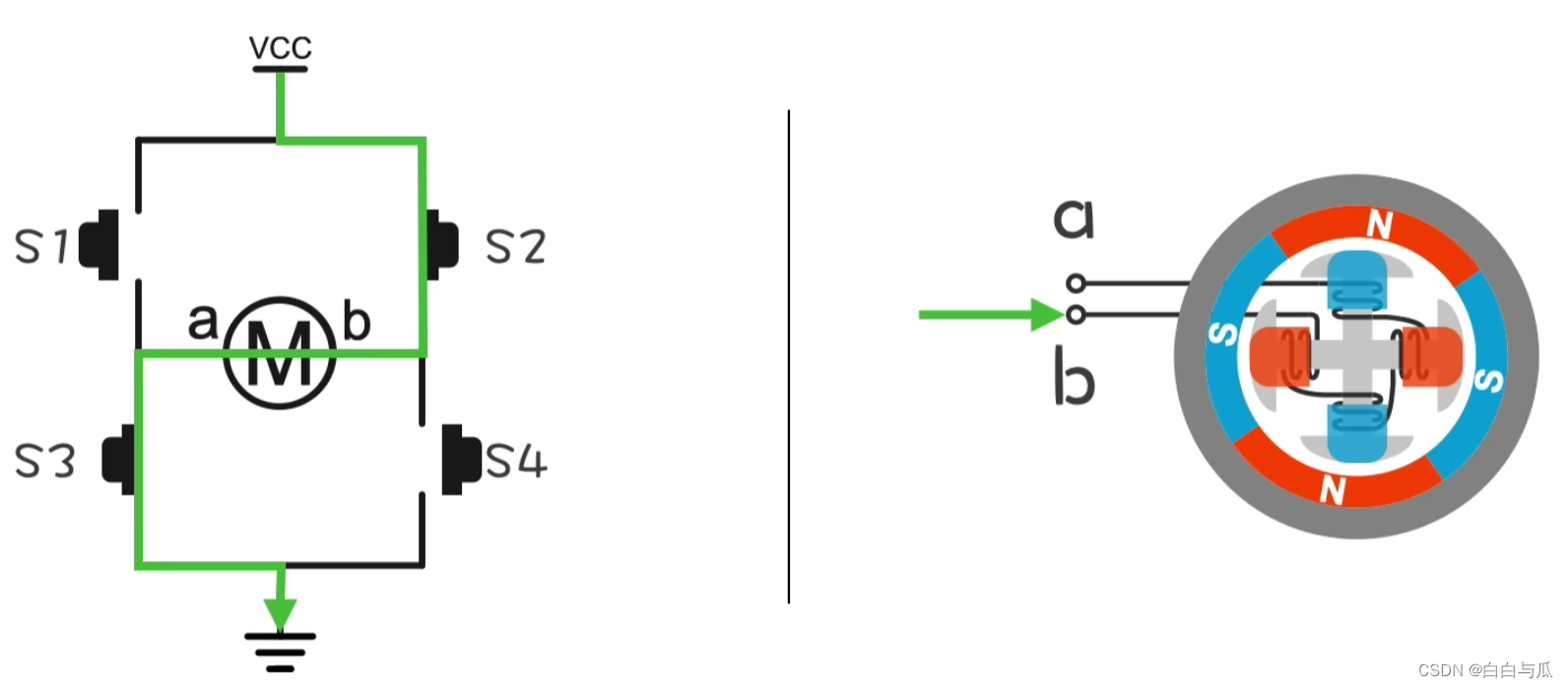
以外转子单相无刷电机为引,基于“同性相斥、异性相吸”的原理产生转动:

上下线圈的绕向相反,则通电时极性相同:
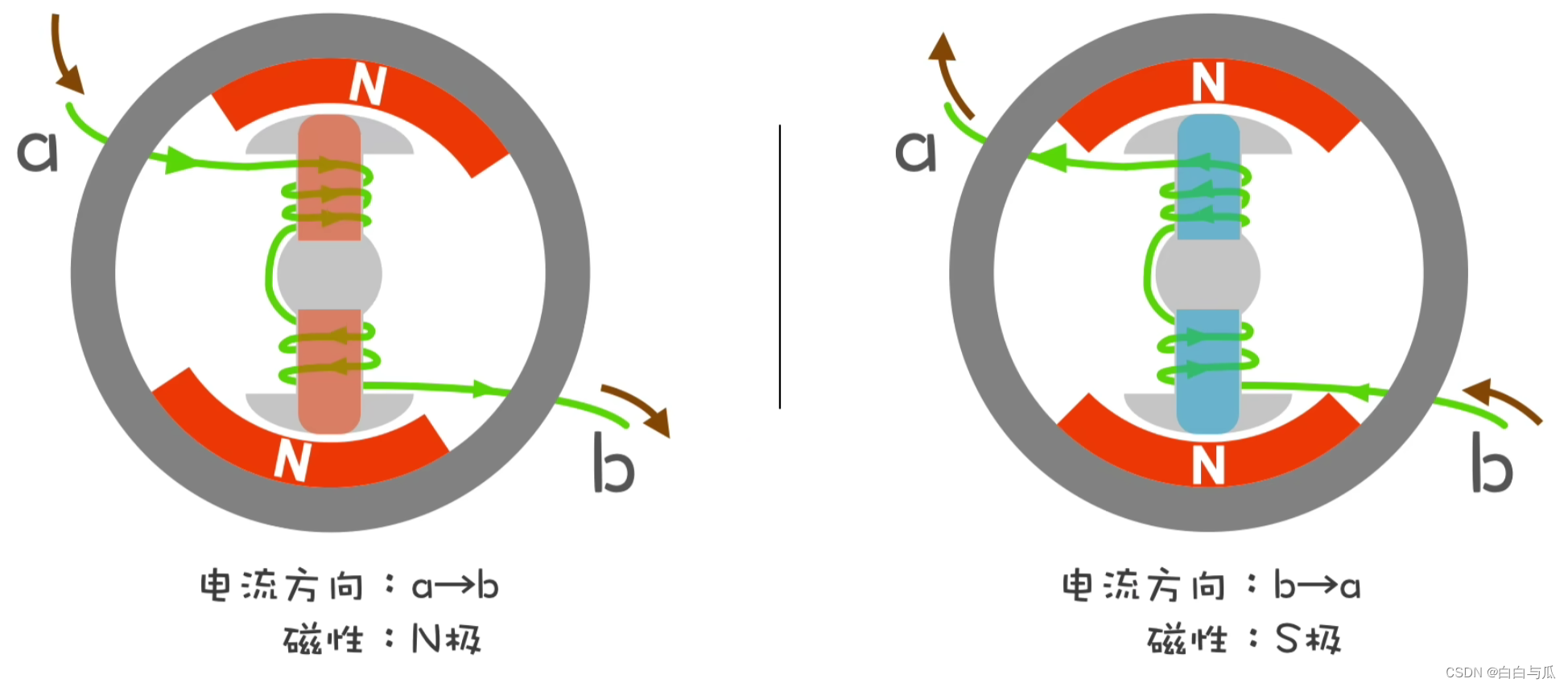
通过H桥交替导通,以变换流入a、b的电流方向,从而改变线圈极性,使其转动起来。利用单片机进行控制时,S1-4这四个开关由MOS管来代替——这样便可通过调节输入MOS管的PWM占空比来控制转速。
而内转子无刷电机同理:
下图从左到右依次为,每60°、每90°、每15°进行一次换相:
3.2 三相无刷电机
三相无刷电机的三个线圈则是彼此独立的。由于依次导通单个线圈的方式线圈利用率低,故常采取星形连接一次导通两相或三相:

为提高力矩常采用该种形制:
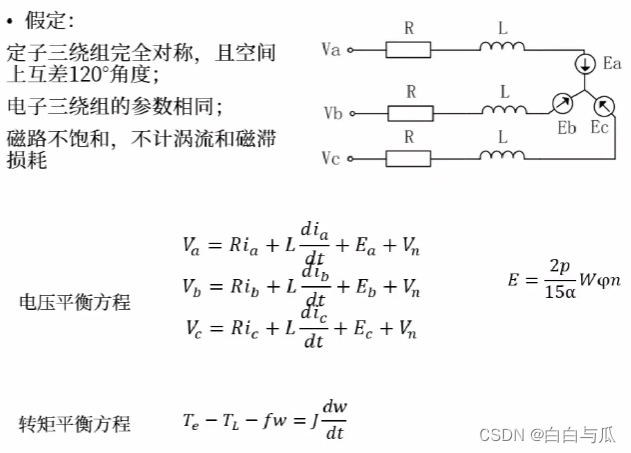
三相无刷电机数学模型为:
其运行特性为:
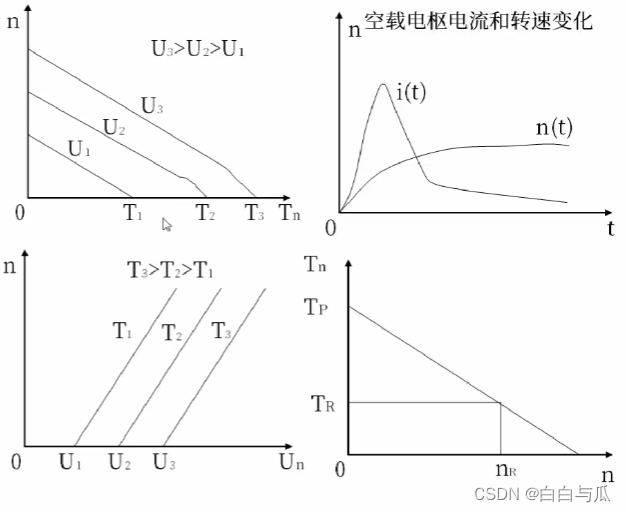
-从上到下从左到右分别为:转速-转矩;转速-外施电压;空载电枢电流-时间 转速-时间;额定转矩-转速-
4 驱动方法
详细介绍待后续更新。
4.1 六步换相控制
每次同时控制两个线圈导通,按顺序从1-6变更通电模式,则合成磁通量将顺时针旋转。通过变更合成磁通量的方向,控制速度,可控制转子的旋转速度。将切换这6种通电模式来控制电机的控制方法称为“六步换相控制(Six-Step Commutation)”,或称“120度通电控制”、“梯形控制(Trapezoidal Control)”:
接下来,尽管在六步换相控制下合成磁通量的方向会发生旋转,但其方向不过只有6种。比如将“通电模式1”改为“通电模式2”,则合成磁通量的方向将变化60度。然后转子将像被吸引一样发生旋转。接下来,从“通电模式2”改为“通电模式3”,则合成磁通量的方向将再次变化60度。转子将再次被该变化所吸引。这一现象将反复出现。这一动作将变得生硬。有时这动作还会发出噪音。
4.2 正弦波控制
能消除六步换相控制的缺点、实现流畅的转动的正是“正弦波控制”。在六步换相控制中,合成磁通量被固定在了6个方向,且各相生成的磁通量大小相同。但是,若能较好地调整各相电流,则可让各相线圈同时产生大小各异的磁通量,精密地控制合成磁通量的方向。通过控制这一磁通量连续生成,可使电机流畅地转动:
5 转子位置信息的获取

BLDC电机的控制是配合着转子(永磁体)的位置(角度)进行的,那如何获知控制所需的转子的位置信息?一般有有传感器和无传感器两种方案:
- 有传感器方案一般采用霍尔元件、光栅编码器、转速反馈频率信号(FG trace)、旋转变压器(Resolver)等方式。
| 电机类型 | 传感器种类 | 主要用途 | 特征 |
|---|---|---|---|
| BLDC | 霍尔效应传感器 | 梯形波、120度通电控制 | 每60度获取一次信号,价格较低,不耐热。 |
| PMSM | 光电编码器 | 正弦波控制、矢量控制 | 有增量型(可得知原位置开始的移动距离)和绝对型(可得知当前位置的角度)两种。 分辨率高,但抗震性、防尘能力较弱,成本较高。 |
| 转角传感器 | 正弦波控制、矢量控制 | 分辨率高,适用于恶劣环境。 |
- 而无传感器方案一般采用反电动势检测等方式。
5.1 霍尔传感器
霍尔传感器在N极靠近时输出高电平、S极靠近时输出低电平:
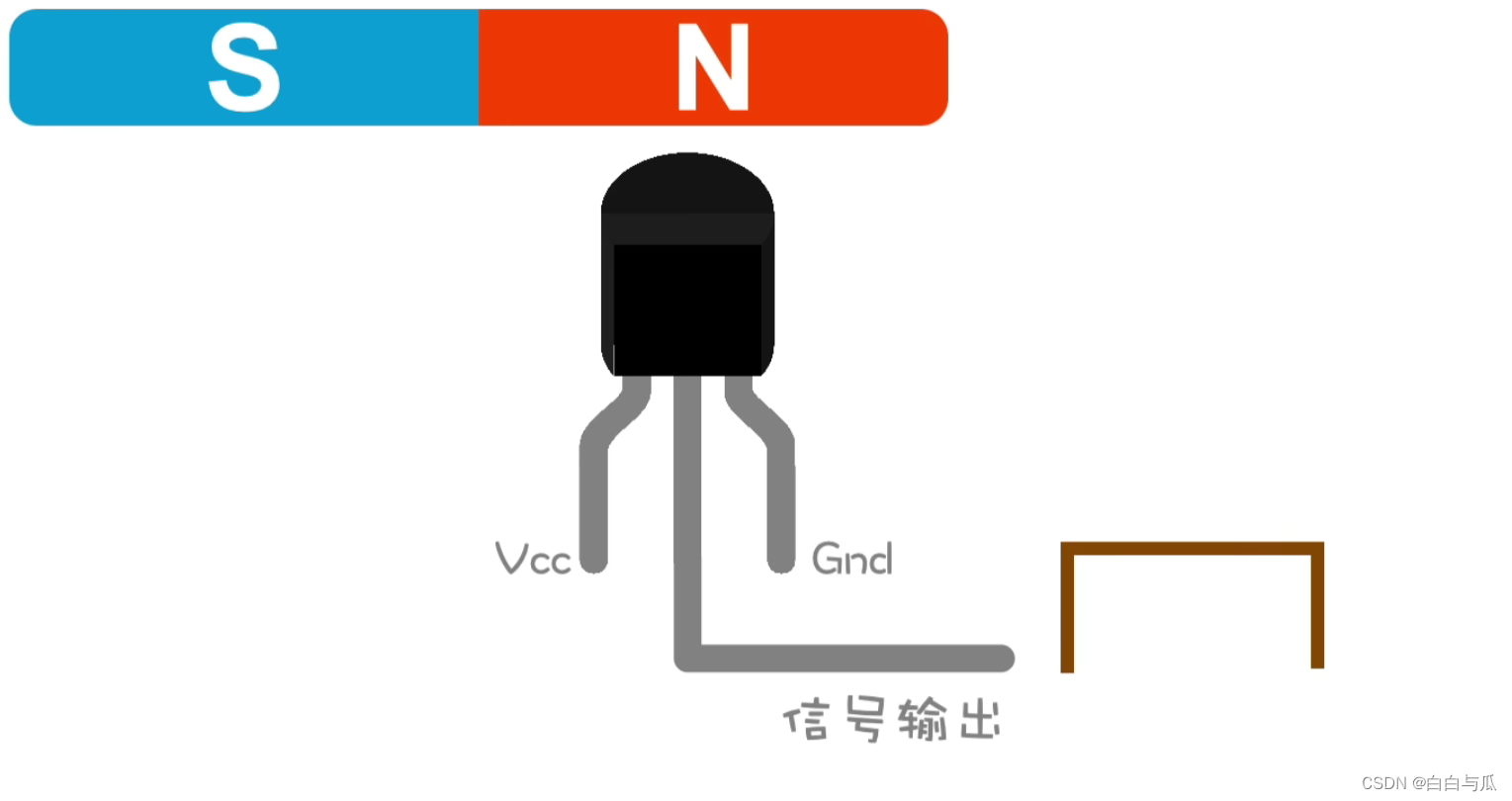
霍尔传感器并不会提供转子在扇区内的精确位置,但可以检测转子何时从一个扇区过渡到另一个扇区。以单相无刷电机为例,每当转子转过90度,霍尔信号输出电平交换一次。旋转一周则改变4次。
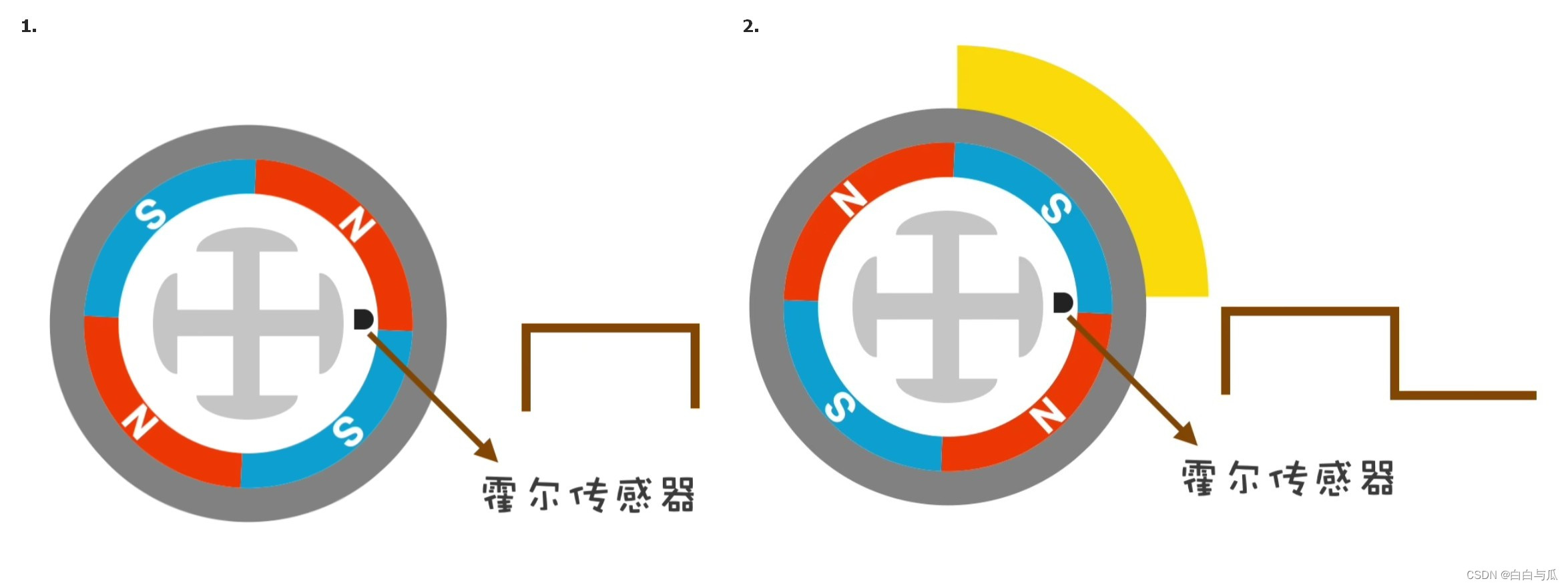
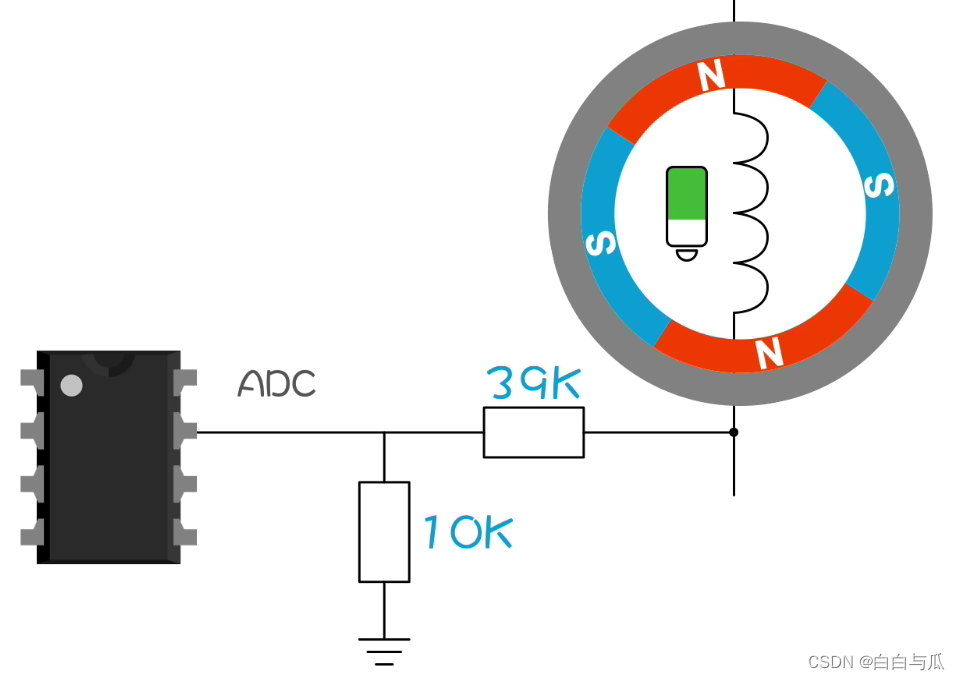
一般采用加装霍尔元件的方法,来防止在临界位置时电平紊乱输出的干扰:

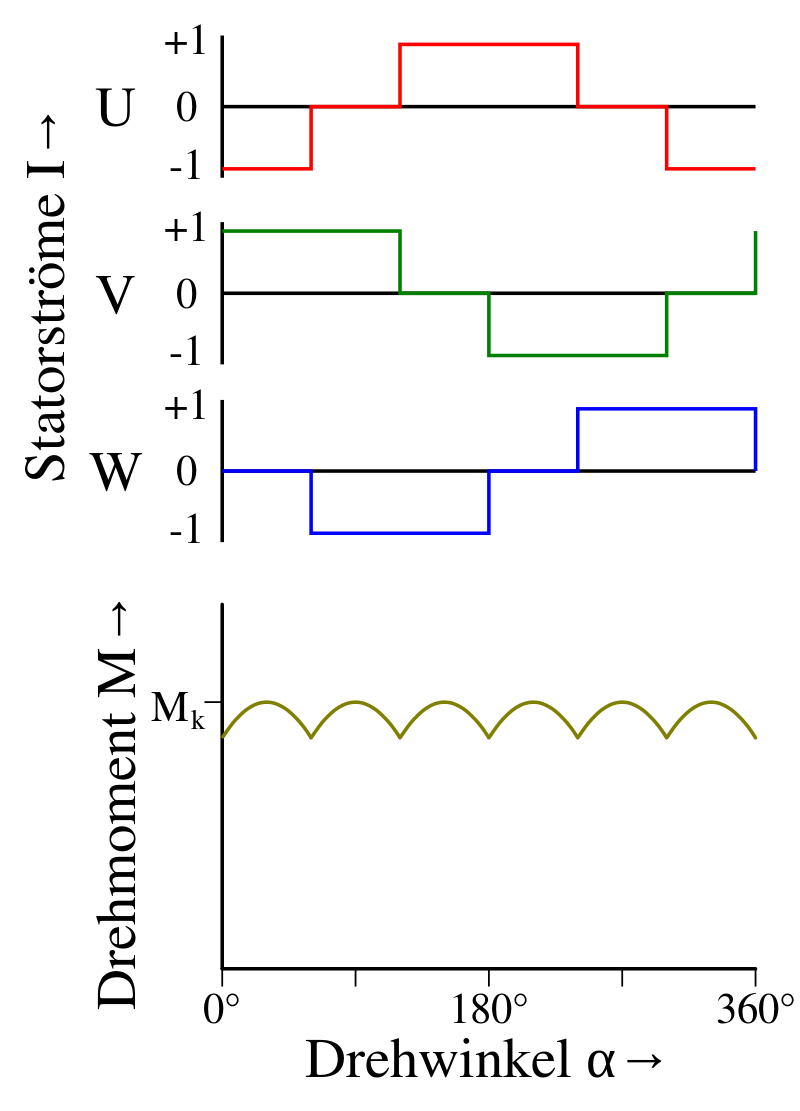
多数BLDC电机在其非驱动端上的定子中嵌入了三个霍尔传感器。根据这三个霍尔传感器信号的组合,就能决定换向的精确顺序。每次换向,都有一个绕组连到控制电源的正极,第二个绕组连到负极,第三个处于失电状态。其中,绕组加电的顺序由六步换向定义。下图为三个60°间距霍尔传感器输出的高低电平波形及实际安装位置:

或采用120°间距排布:

各相定子电流I、转矩M与转角α的关系:
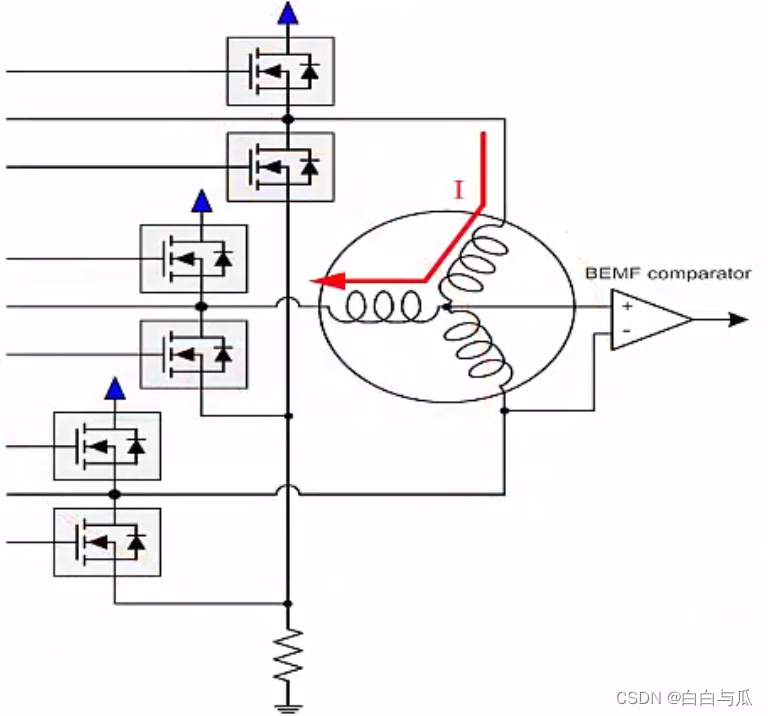
5.2 反电动势
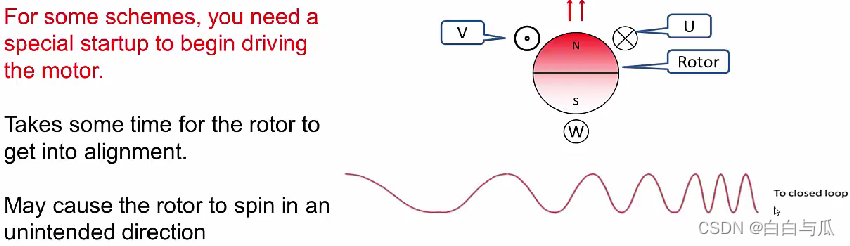
在既定电机磁通量和绕组数固定的情况下,反电动势的幅度与电机的旋转速度成正比。当电机在控制模式下运转多个换向周期直到获得一定速度后,无传感器测量便能够确定转子位置。无传感器控制的BLDC电机适合安装在难以检修的位置,或在多灰尘、多油的环境中运行,但不适合需要较低速度的应用,因为此时反电机势很小而难以测量(故其启动需要特殊方法),会造成工作效率不高。
一般监测未被驱动相的反电动势变化信息(过零点信息)推算转子角度:

若三相均被驱动,则综合电压电流信息来估算反电势波形,通过过零点信息估计转子位置。
基于反电动势测量转子位置的控制器,在启动时会面临额外的挑战:转子静止时不会产生反电动势(只有当转子磁场切割定子线圈时才会产生反电动势)。目前经常采用的启动方法为“三段式”启动。一般来说,三段式启动包括定位、加速、切换三个过程。