声明:本系列博客参考有关专业书籍,截图均为自己实操,仅供交流学习!
一、连续系统定义
连续系统输出在时间上连续变化,而非间隔采样取值,满足以下条件:
①输出连续变化,变化的间隔为无穷小量。
②数学描述上,存在输入或输出的微分项。
③系统具有连续状态。离散系统的状态为时间的离散函数,而连续系统为时间的连续函数。
设连续函数的输入变量为u(t),其中t为连续取值的时间变量,系统的输出为y(t),最一般的数学描述为:
注:这里系统的输入变量与输出变量既可以是标量,也可以是向量。
也可以使用连续系统的微分方程描述(左微分方程,右输出方程):
这里的x(t),分别是连续系统的状态变量和状态变量的微分。
二、连续系统Simulink仿真
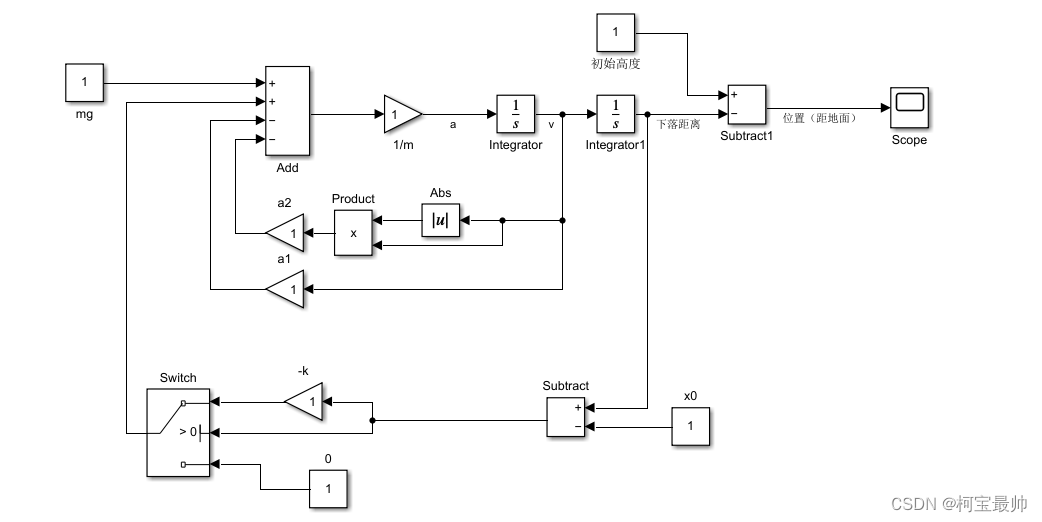
蹦极跳系统模型。在下落过程中,人几乎处于完全失重状态,自由落体时人的位置由下式确定(后两项为经验阻力项,x为下落距离):
起跳位置为起点(x=0),低于起点为正,高于起点为负,绳索弹力系数为k,原始长度为x0,则绳索对下落者的作用力:

综上两式,整个系统的数学描述为:
(1)建立系统模型
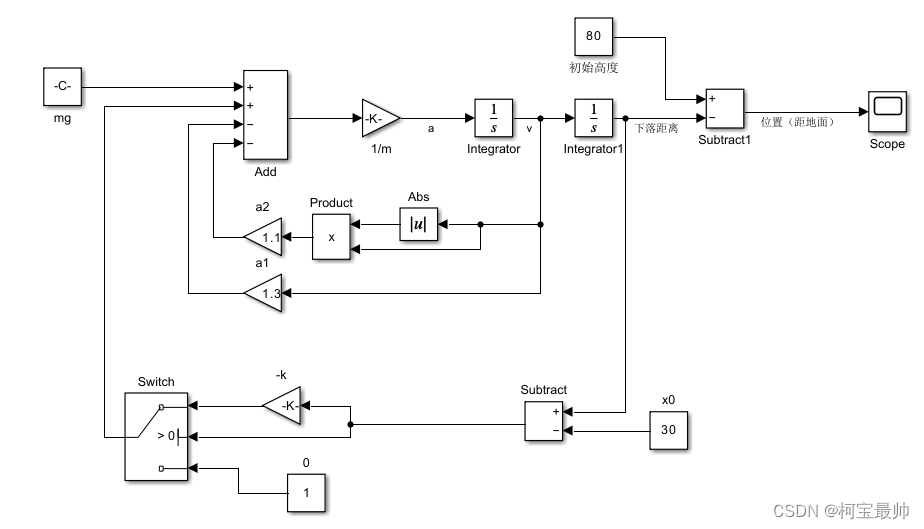
(2)模块参数设置
起跳初始位置距地面80m,绳索初始长度x0为30m,起始速度为0,即(0)=0。k=18.45,a1=1.3,a2=1.1,m=70kg,g=9.8。
switch模块的阈值设置为0,Criteria for passing first input设置为u2>阈值。
(3)仿真运行
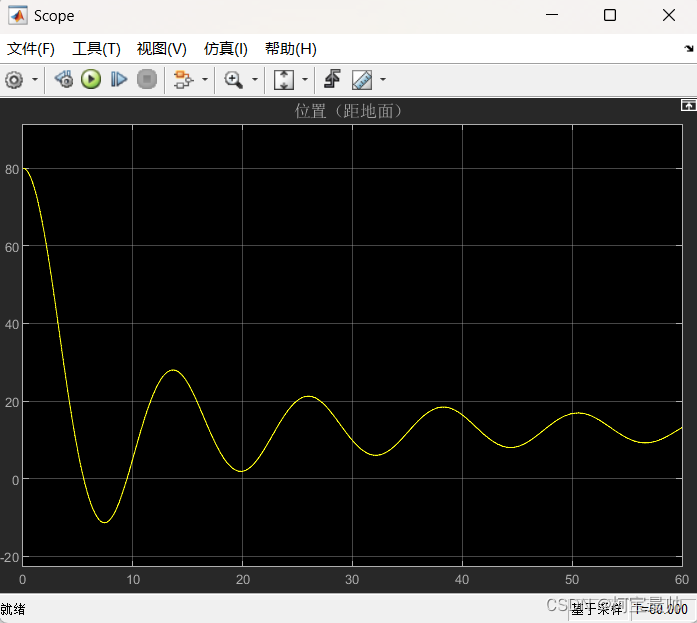
(4)更改仿真参数设置,结果更平滑


三、线性连续系统定义
满足齐次性和叠加性!
①输入输出方程形式描述
②微分方程形式描述
也可使用传递函数、零极点模型、状态空间模型描述!
③传递函数与零极点模型用Laplace变换实现(此处可对比线性离散系统)
对于连续信号u(t),其Laplace变换为,一般系统时间大于0,所以变换为
,简记为
Laplace变换重要性质:
- 线性性;
- 设连续信号u(t)的Laplace变换为U(s),则
的Laplace变换为
④状态空间模型
四、线性连续系统Simulink仿真
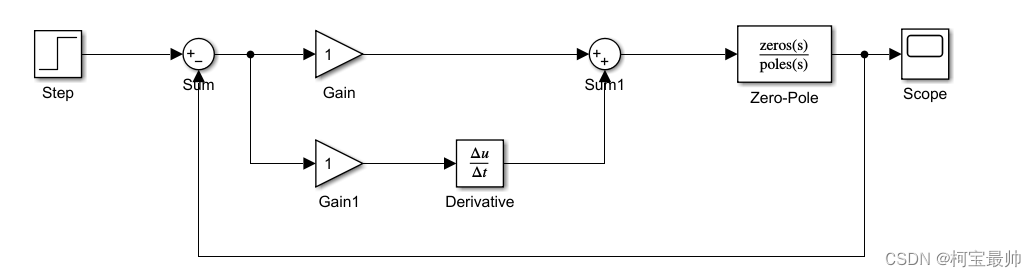
实际系统大多是非线性的,但是一定范围内都可用线性系统近似!线性连续系统的建立与一般线性系统本质相同,但是线性连续系统一般使用传递函数模型、零极点模型、状态空间模型描述,分别对应Transfer Fcn模块、Zero-Pole模块、Sate-Space模块!
一个执行机构的传递函数(零极点形式)如下:

显然系统不稳定,下面建立比例微分控制器系统使其稳定!
(1)建立系统模型
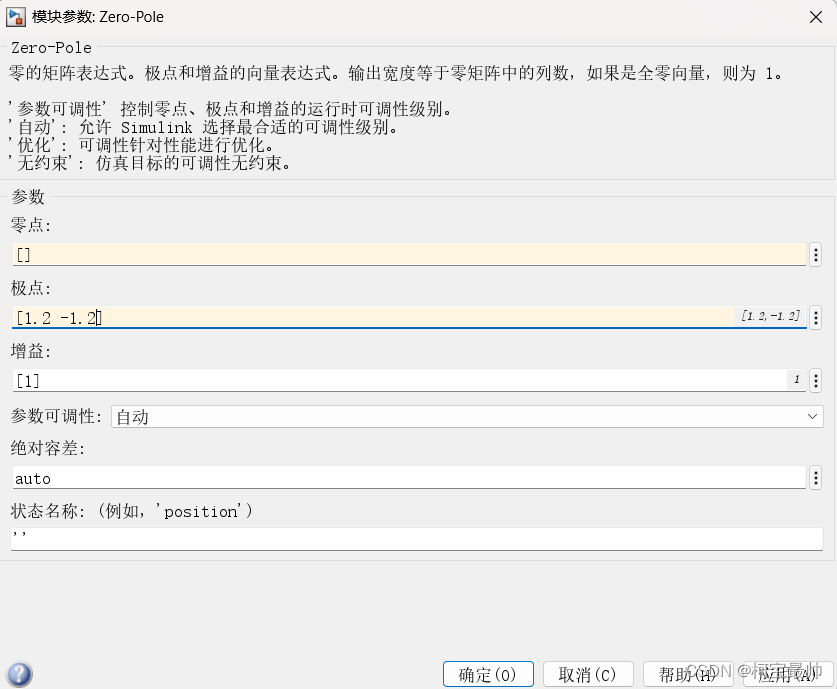
(2)模块参数设置
这里没用1.1,-0.1,换成了1.2,-1.2。可根据实际传递函数进行零极点设置:
Gain和Gain1分别取15和2,可根据需要进行微调!
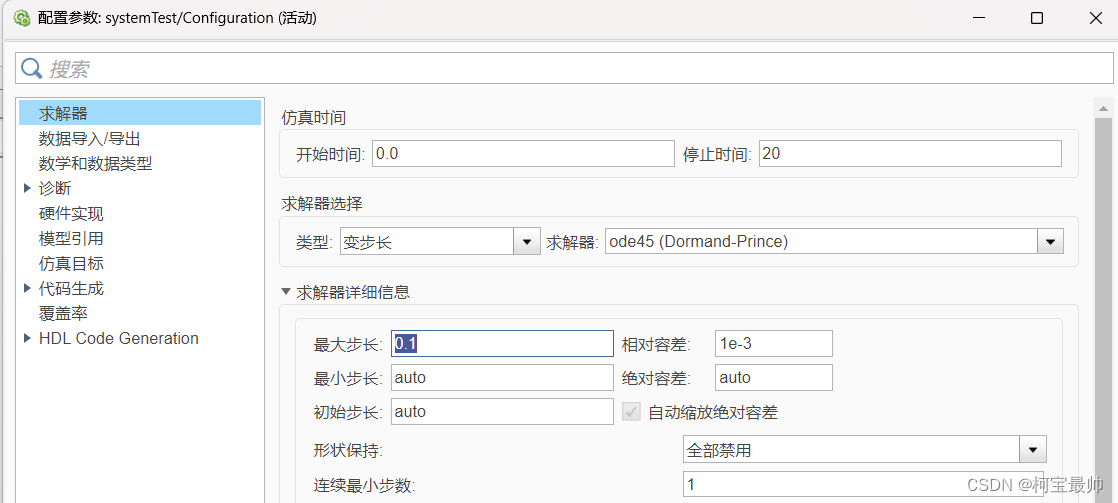
(3)仿真参数设置
(4)仿真运行
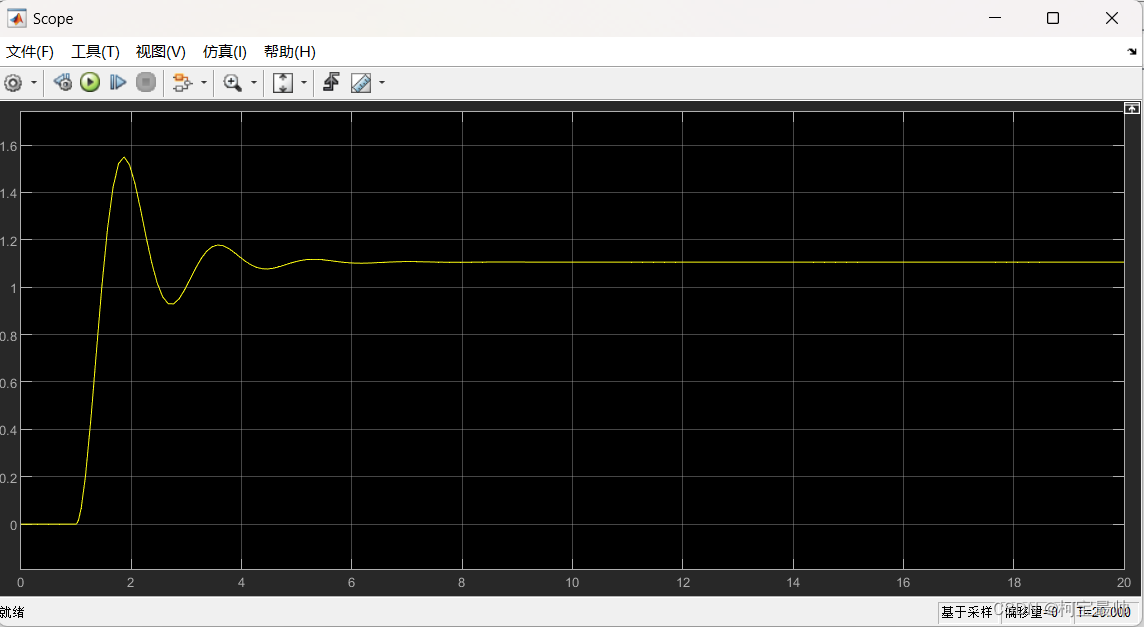
系统可以达到稳定,但是存在严重振荡现象和较大的稳态误差,可通过调节控制器参数进行修正!
往期精彩
STM32专栏(付费9.9)![]() http://t.csdnimg.cn/E2F88
http://t.csdnimg.cn/E2F88
OpenCV-Python专栏(付费9.9)![]() http://t.csdnimg.cn/zK1jV
http://t.csdnimg.cn/zK1jV
AI底层逻辑专栏(付费9.9)![]() http://t.csdnimg.cn/zic0f
http://t.csdnimg.cn/zic0f
机器学习专栏(免费)![]() http://t.csdnimg.cn/FaXzAFreeRTOS专栏(免费)
http://t.csdnimg.cn/FaXzAFreeRTOS专栏(免费)![]() http://t.csdnimg.cn/SjIqU电机控制专栏(免费)
http://t.csdnimg.cn/SjIqU电机控制专栏(免费)![]() http://t.csdnimg.cn/FNWM7
http://t.csdnimg.cn/FNWM7