《自动驾驶技术概论》学习笔记
致谢:作者:王建、徐国艳、陈竞凯、冯宗宝
本书主要介绍汽车构造和无人驾驶汽车的基本概念,从基础开始,由浅入深地了解无人驾驶的历史由来、国内外自动驾驶产业现状及技术发展、自动驾驶汽车的技术架构、自动驾驶开发平台等知识,并详细介绍百度Apollo无人驾驶平台,通过实际的案例深入了解无人驾驶知识体系。
清华大学出版社此书链接:http://www.tup.tsinghua.edu.cn/booksCenter/book_08301001.html#
系列丛书
学习笔记只是随手记录一下阅读的心得,碰到感兴趣的技术要点详细记录,拓宽拓宽眼界,增长增长见识,从自动驾驶的概论到感知-定位-决策-控制,这几个方面学习学习自动驾驶啦~~
未读章节:不标记颜色
已读章节:底部标绿色
感兴趣点:底部标黄色
--------------------------------------------------------------------------------------------------------
《自动驾驶技术概论》
目录
前言
第1章自动驾驶技术概述
1.1汽车发展史及发展趋势
1.1.1蒸汽机与蒸汽机车的发明
1.1.2内燃机与内燃机汽车的发明
1.1.3汽车发展趋势
1.2自动驾驶汽车的产生
1.2.1研发历史
1.2.2自动驾驶时代的开启
1.3自动驾驶概述
1.3.1定义及分级标准
1.3.2SAE J3016的自动驾驶级别划分
1.3.3中国智能汽车等级划分
1.4自动驾驶技术与行业发展现状
1.4.1技术发展现状
1.4.2行业代表
参考文献
第2章汽车构造基础
2.1车辆动力传动系统
2.1.1概述
2.1.2传统动力传动系统
2.1.3纯电动传动系统
2.1.4混动传动系统
2.2车辆悬架系统
2.2.1概述
2.2.2非独立悬架
2.2.3独立悬架
2.2.4电控悬架
2.3车辆转向系统
2.3.1转向系统的功用及类型
2.3.2转向器
2.3.3转向助力
2.4车辆制动系统
2.4.1概述
2.4.2制动器
2.4.3制动助力系统
2.4.4制动力调节系统
2.5汽车线控系统技术
2.5.1概述
2.5.2汽车线控的关键技术
2.5.3典型线控系统
2.6CAN总线技术
2.6.1概述
2.6.2工作原理
2.6.3工作特点
2.6.4SAE J1939协议
2.6.5百度自动驾驶汽车的线控技术应用
参考文献
第3章自动驾驶汽车技术架构
3.1自动驾驶汽车整体架构
3.2环境感知传感器技术
3.2.1激光雷达
3.2.2摄像头
3.2.3毫米波雷达
3.2.4超声波雷达
3.2.5环境感知实例——车道线检测
3.3定位系统
3.3.1卫星定位技术
3.3.2差分定位系统
3.3.3惯性导航定位
3.3.4多传感器融合定位技术
3.4高精地图技术概述
3.4.1高精地图综述
3.4.2高精地图在自动驾驶中的应用
3.4.3高精地图的制作
3.5规划与决策系统概述
3.5.1路径规划
3.5.2路径规划算法介绍
3.6V2X技术概述
3.6.1V2X分系统概述
3.6.2V2X典型应用
参考文献
第4章自动驾驶汽车开发平台
4.1开发平台概述
4.2硬件平台
4.2.1传感器平台
4.2.2计算平台
4.2.3线控车辆平台
4.3软件开源平台
4.3.1ROS介绍
4.3.2ROS特点
4.3.3ROS文件系统层
4.3.4ROS计算图层
4.4整体开放平台
4.4.1硬件平台
4.4.2软件平台
4.4.3云端平台
4.5安全解决方案
4.5.1潜在威胁与对应方案
4.5.2Apollo安全方案
参考文献
第5章Apollo平台介绍
5.1Apollo平台概述
5.1.1Apollo平台发展历程
5.1.2Apollo平台技术框架
5.2Apollo车辆要求
5.2.1车辆功能要求
5.2.2车辆线控要求
5.3Apollo支持的传感器
5.3.1激光雷达
5.3.2毫米波雷达
5.3.3摄像头
5.3.4导航模块
5.3.5工控机
5.3.6CAN卡
5.3.7Apollo传感器单元
5.4Apollo平台的安装和使用
5.4.1Apollo内核的编译
5.4.2构建Docker容器
5.4.3编译Apollo源代码
5.4.4启动并运行Apollo平台
5.5开放数据集
5.5.1仿真场景数据
5.5.2标注数据
5.5.3演示数据
参考文献
--------------------------------------------------------------------------------------------------------
1.汽车发展史
从蒸汽到电汽,世界汽车百年发展回顾 - 知乎 (zhihu.com)
汽车发展史_百度百科 (baidu.com)
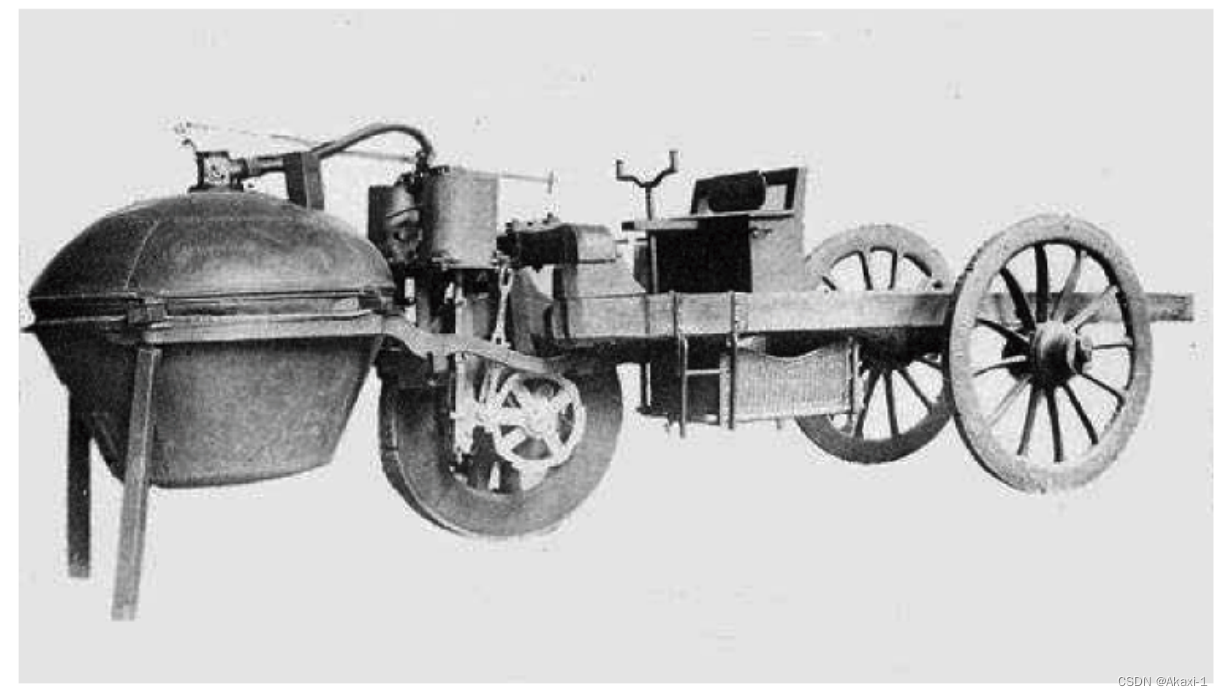
世界上第一台蒸汽机车

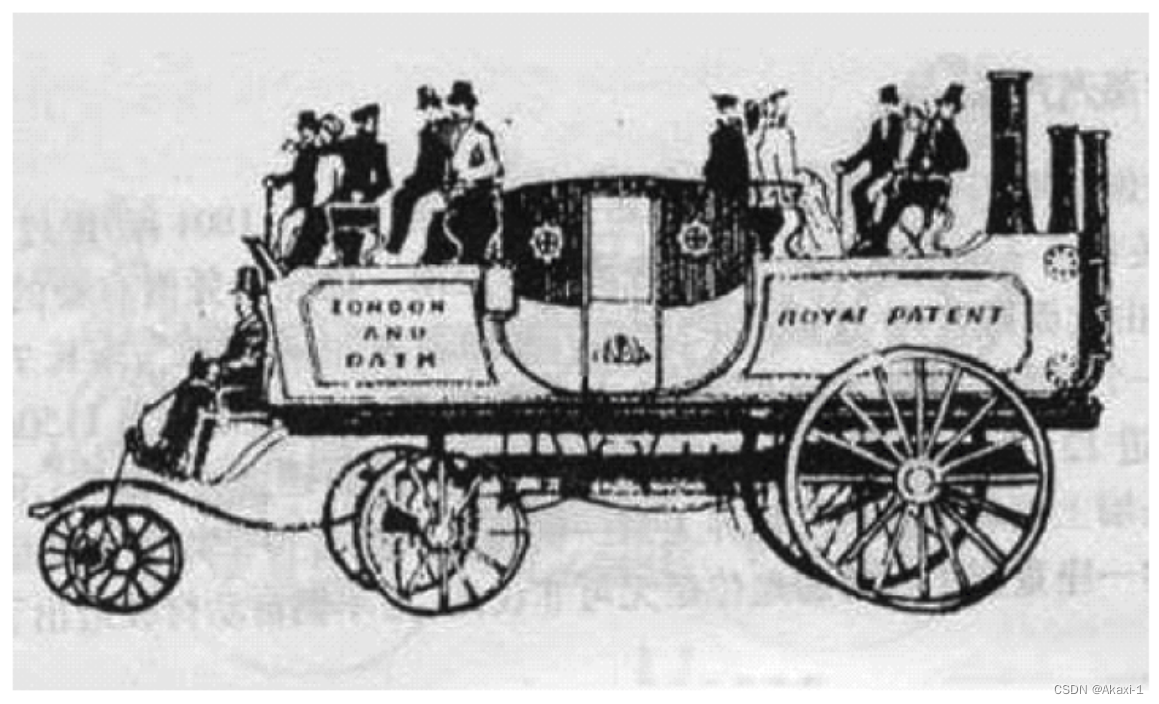
蒸汽公共汽车
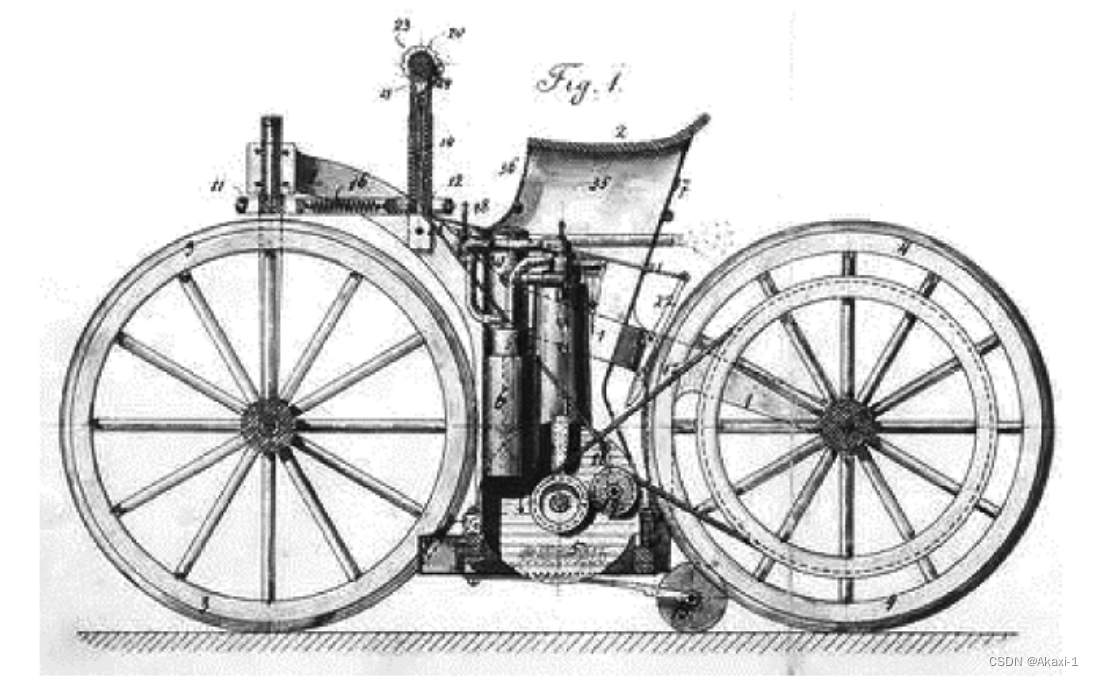
世界上第一台内燃式摩托车

奔驰一号
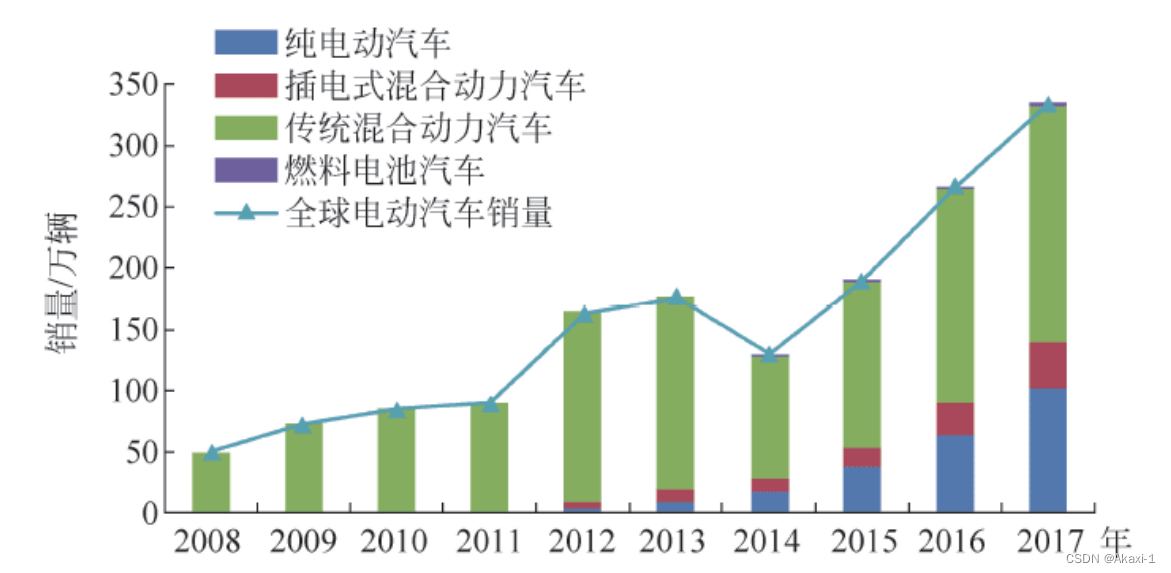
未来汽车的发展方向主要呈现为电动化与智能化,未来将朝着更清洁的燃料电池汽车方向发展。
2015年,工信部发布的《中国制造2025》明确提出,到2025年,我国将掌握自动驾驶的总体技术以及各项关键技术,要建立起比较完善的智能网联汽车的自主研发体系,生产配套体系以及产业群,要基本完成汽车产业的转型升级。
重磅!2022年中国及31省市自动驾驶汽车行业政策汇总及解读(全)国家政策频出以抢占技术与产业制高点_行业研究报告 - 前瞻网 (qianzhan.com)
中国自动驾驶产业政策汇总(2022)_腾讯新闻 (qq.com)
2.国内外自动驾驶
无人驾驶综述:国外国内发展历程_自动驾驶历史 varos-CSDN博客
走进CMU:无人驾驶技术诞生的地方 | 雷峰网 (leiphone.com)
2.1 NavLab

这款被CMU研发团队命名为“Terregator”的小车,有六个轮子,每秒能行驶几厘米。车身配置的一系列传感器,包括声纳环、摄像头,以及一个单线激光雷达测距仪,它们将负责对障碍物和环境进行感知。
在那段时间,DARPA(美国国防部高级研究计划局)资助了一些院校和制造商企业,作为其中之一,CMU的任务是负责解决ALV系统复杂的感知和集成问题。为了攻克该技术,CMU的研究人员于1984年组建了导航实验室,命名为“NavLab”,专注于复杂环境中的高难度视觉感知问题研究。
2.2 Argo Ai
2016年11月,Bryan Salesky和Peter Rander博士,两位分别拥有Google和Uber自动驾驶团队任职背景的大牛,行业内最先进两家公司Waymo和Uber的前技术专家,在美国宾夕法尼亚州匹兹堡联合成立了Argo AI
Argo AI、卡内基梅隆大学和佐治亚理工学院共同发布数据集——Argoverse。
数据集是自动驾驶神经网络模型不断成长的肥料,很多自动驾驶公司和知名大学都公开过自动驾驶的数据集。
ARGO数据集—自动驾驶场景(版本:Argoverse 1.1)-CSDN博客
已倒闭的自动驾驶初创公司 Argo AI 的创始人将宣布成立新的自动驾驶初创公司,如何看待此事? - 知乎 (zhihu.com)

2.3 DARPA挑战赛
到2003年,伊拉克战争爆发,无人驾驶技术还没有大的进展。根据法案,美国国会命令DARPA负责推动相关技术的发展,授权该局对无人驾驶汽车的研发人员进行现金奖励。有了奖金的支持,DARPA决定另辟蹊径,举办一项奖金为100万美元的公开竞赛,吸引更多的团队投入智能车研究。所以从2004到2007年,DARPA共赞助了三场公路赛事,分别是:2004年和2005年DARPA大挑战赛和2007的DARPA城市挑战赛,这几项赛事奠定了当代自动驾驶汽车的技术基础。

当代自动驾驶产业的起源-DARPA挑战赛 - 知乎 (zhihu.com)
中国智能车未来挑战赛
中国智能车未来挑战赛_百度百科 (baidu.com)

3.自动驾驶定义
3.1 NHTSA
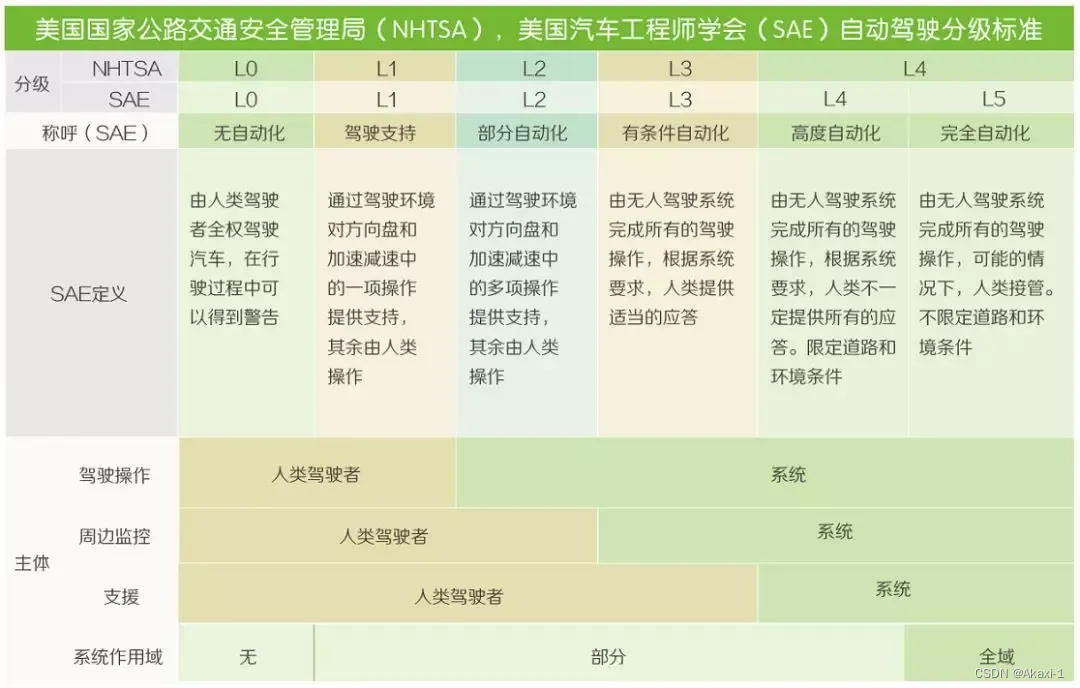
美国国家公路交通安全管理局(NHTSA,National Highway Traffic Safety Administration)发布了自动驾驶汽车的分级标准,其对自动化的描述共有4个级别。

3.2 SAE J3016标准
SAE(SAE International, Society of Automotive Engineers国际自动机工程师学会)制定了一套自动驾驶汽车分级标准SAE J3016《标准道路机动车驾驶自动化系统分类与定义》,其对自动化的描述分为5个等级。
(1)驾驶支援:通过驾驶环境对方向盘和加减速中的一项操作提供驾驶支持,其他的驾驶动作都由人类驾驶员进行操作。
(2)部分自动化:通过驾驶环境对方向盘和加减速中的多项操作提供驾驶支持,其他的驾驶动作都由人类驾驶员进行操作。
(3)有条件自动化:由自动驾驶系统完成所有的驾驶操作。根据系统要求,人类驾驶者提供适当的应答。
(4)高度自动化:由自动驾驶系统完成所有的驾驶操作。根据系统要求,人类驾驶者不一定需要对所有的系统请求做出应答,车辆需行驶在限定道路和环境条件下。
(5)完全自动化:在所有人类驾驶者可以应付的道路和环境条件下,均可以由自动驾驶系统自主完成所有的驾驶操作。
区分自动驾驶:能否自动转向、加速、制动
3.3 SAE International标准
SAE International关于自动化层级的定义已经成为自动化/自动驾驶车辆的全球行业参照标准,用以评定自动驾驶技术级别。
L0:驾驶员完全掌控车辆。
Ll:自动系统有时能够辅助驾驶员完成某些驾驶任务。
L2:自动系统能够完成某些驾驶任务,但驾驶员需要监控驾驶环境,完成剩余部分,同时保证出现问题时,随时进行接管。在这个层级,自动系统的错误感知和判断由驾驶员随时纠正。
L3:自动系统既能完成某些驾驶任务.也能在某些情况下监控驾驶环境,但驾驶员必须准备好重新取得驾驶控制权(自动系统发出请求时)。所以在该层级下,驾驶者仍无法进行睡觉或者深度的休息。
L4:自动系统在某些环境和特定条件下,能够完成驾驶任务并监控驾驶环境。在这个阶段,在自动驾驶可以运行的范围内,驾驶相关的所有任务和驾乘人已经没关系了,感知外界的责任全在自动驾驶系统。
L5:自动系统在所有条件下都能完成所有驾驶任务。
3.4 中国智能汽车标准
在《中国制造2025》中,我国将智能网联汽车分为DA、PA、HA、FA共计4个级别。完全手动驾驶没有计人其中。总体看来,分级如下。
1)手动驾驶(MD)
顾名思义就是最普通的手动驾驶汽车。
2〉驾驶辅助(DA)
一项或者多项局部自动功能﹐例如 ESC、ACC、AEB等,并能提供基于网联的智能信息提示。
3)半自动化(PA)
在驾驶者短时间转移注意力仍可保持控制,失去控制十秒以上予以提醒,并能提供基于网联的智能引导信息。
4)高度自动化(HA)
在高速公路和市区内部均可自动驾驶,偶尔需要驾驶员接管,但是有充分的移交时间,并能提供基于网联的智能控制信息。
5)完全自动化(FA)
驾驶权完全交给车辆,这种自动化水平允许驾驶员从事计算机工作,休息和睡眠等其他活动。
4.自动驾驶技术

书上的内容比较简略概括,详细的话在之后的对应书籍上面再做学习。
5.自动驾驶企业
5.1 谷歌Waymo
Waymo是一家研发自动驾驶汽车的公司,为Alphabet(Google母公司)旗下的子公司。
谷歌无人驾驶汽车的感知核心是位于车顶的旋转式激光雷达,该设备可以发出64道激光光束,能够计算出200m 以内物体的距离,得到精确的3D地图数据。自动驾驶汽车会将激光雷达测得的数据和高精地图相结合,生成反映周边环境的数据模型。安装在前挡风玻璃的摄像头可以用于近景观察,帮助自动驾驶汽车识别前方的人和车等障碍物,记录行程中的道路情况和交通信号的标志,最后通过相应算法对信息进行综合和分析。轮胎上的感应器可以保证汽车在确定轨道内行驶;倒车时,还能快速测算出后方障碍物的距离,实现安全停车。汽车前后保险杠内安装有4个雷达元件,可以保证汽车在道路上保持2~~4s的安全反应距离﹐并根据车速变化进行距离调整,最大程度保证乘客的安全。
官网:waymo.com

《通往完全自动驾驶之路》
- 谷歌无人车的安全设计理念
- Waymo无人车是如何工作的
- 测试和验证是如何进行的
- 无人车相关交互细节
【码一下】谷歌全方位自曝Waymo无人车技术方案|42页报告要点解读+下载 - 知乎 (zhihu.com)
5.2 特斯拉Tesla
Autopilot | 特斯拉中国 - Tesla
与时间赛跑,特斯拉Autopilot进化史 - 知乎 (zhihu.com)
关于 Autopilot 自动辅助驾驶 (tesla.com)
Autopilot 自动辅助驾驶是高级辅助驾驶功能套件,旨在提升驾驶安全性并减轻压力。这些功能都无法实现 Model S 完全自动驾驶或取代您的驾驶员身份。Autopilot 自动辅助驾驶功能是所有新款 Tesla 车辆的标配。

5.3 奥迪Audi

L3的领跑者:奥迪A8自动驾驶系统详析 - 知乎 (zhihu.com)
自动驾驶行业观察 | 进军Level 3,奥迪A8自动驾驶功能剖析 - 知乎 (zhihu.com)
5.4 百度Apollo
阿波罗(Apollo)是百度发布的面向汽车行业及自动驾驶领域的合作伙伴提供的软件平台。发布时间是2017年4月19日,旨在向汽车行业及自动驾驶领域的合作伙伴提供一个开放、完整、安全的软件平台,帮助他们结合车辆和硬件系统,快速搭建一套属于自己的完整的自动驾驶系统。而将这个计划命名为“Apollo”计划,就是借用了阿波罗登月计划的含义。
百度Apollo-自动驾驶、智能汽车解决方案


5.5 华为ADS
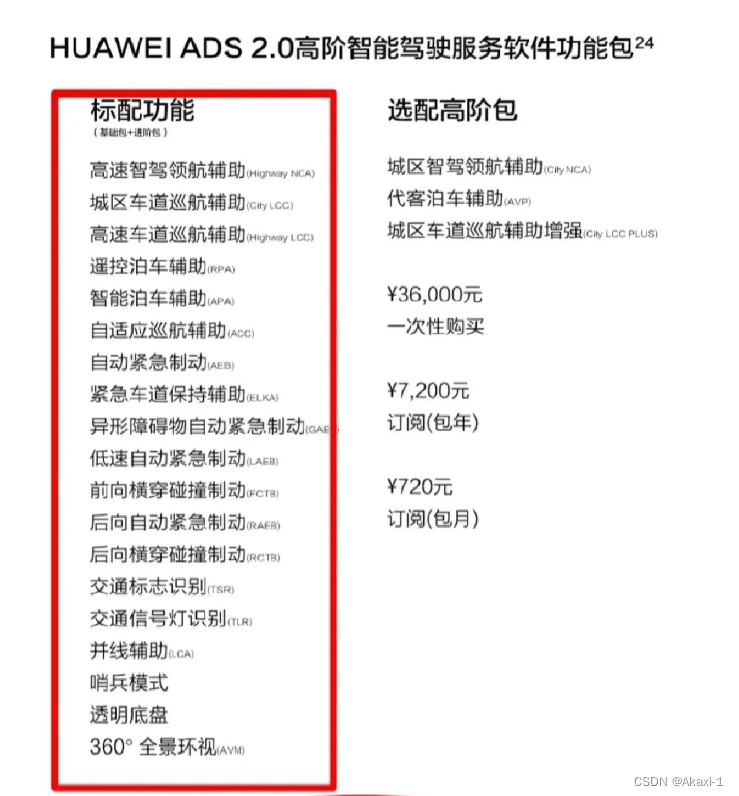
华为高阶智能驾驶系统(HUAWEI Advanced Driving System)是华为发布的智能驾驶系统
ADS 2.0 搭载了业界首创激光融合 GOD 网络,障碍识别更精准,即便是在复杂的交通场景也能安全畅行。ADS 2.0 对高速体验进行了优化,优化后平均人工接管里程从 100km 提升到 200km,上下匝道、通道避障等都能轻松应对。ADS 2.0 搭载的 NCA 智驾领航可覆盖城区 90% 场景,有图无图都能开。智能泊车性能和场景进一步提升,AVP 代客泊车辅助和 360° 全范围障碍物感知加持,跨地面、地下停车场以及机械车位均可进行智能泊车。
HUAWEI ADS_百度百科 (baidu.com)

2024.3.2
渝北仙桃数据谷

![[C++]AVL树怎么转](https://img-blog.csdnimg.cn/direct/1dc15693bc134af68195cfa67540e4c3.png#pic_center)