概述
本文主要介绍STM32F4XX的bxCAN知识,包括bxCAN的概念,各种工作模式下特性,如何配置各类工作模式等内容,还介绍了bxCAN的测试模式,bxCAN测试模式有3种工作类型,每种类型有什么特性,以及如何配置的等内容。
1 认识bxCAN
1.1 bxCAN概念
基本扩展 CAN 外设又称 bxCAN,可与 CAN 网络进行交互。该外设支持 2.0A 和 B 版本的CAN 协议,旨在以最少的 CPU 负载高效管理大量的传入消息,并可按需要的优先级实现消息发送。在攸关安全性的应用中, CAN 控制器提供所有必要的硬件功能来支持 CAN 时间触发通信方案。
1.2 bxCAN 主要特性
● 支持 2.0 A 及 2.0 B Active 版本 CAN 协议
● 比特率高达 1 Mb/s
● 支持时间触发通信方案
发送
● 三个发送邮箱
● 可配置的发送优先级
● SOF 发送时间戳
接收
● 两个具有三级深度的接收 FIFO
● 可调整的筛选器组: — CAN1 和 CAN2 之间共享 28 个筛选器组
● 标识符列表功能
● 可配置的 FIFO 上溢
● SOF 接收时间戳 时间触发通信方案
● 禁止自动重发送模式
● 16 位自由运行定时器
● 在最后两个数据字节发送时间戳
管理
● 可屏蔽中断
● 在唯一地址空间通过软件实现高效的邮箱映射
双 CAN
● CAN1:主 bxCAN,用于管理 bxCAN 与 512 字节 SRAM 存储器之间的通信。
● CAN2:从 bxCAN,无法直接访问 SRAM 存储器。
● 两个 bxCAN 单元共享 512 字节 SRAM 存储器
2 认识bxCAN工作模式
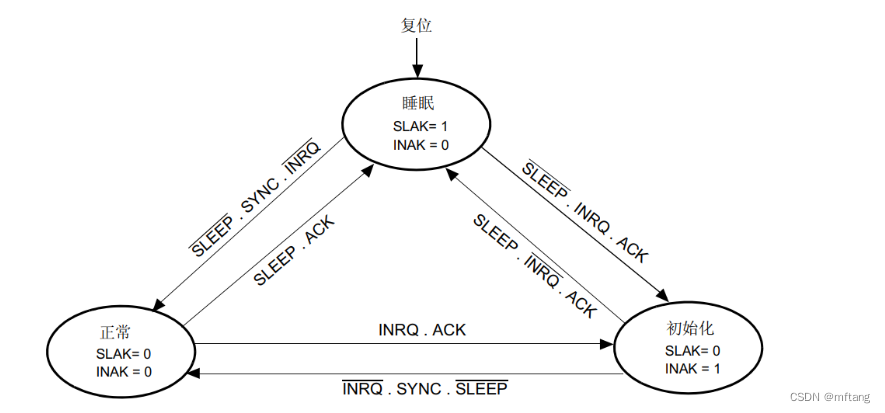
bxCAN 有三种主要的工作模式: 初始化、 正常和睡眠。
2.1 初始化模式
初始化模式的要点如下:
1)当硬件处于初始化模式时,可以进行软件初始化
2)如何进入初始化模式:
软件将 CAN_MCR 寄存器的 INRQ 位置 1,并等待硬件通过将 CAN_MCR 寄存器的 INAK 位置 1 来确认请求。
3)退出初始化模式:
软件将 INQR 位清零。一旦硬件将 INAK 位清零, bxCAN 即退出初始化模式。
4)初始化模式的特点:
-
所有从 CAN 总线传入和传出的消息都将停止,并且 CAN 总线输出 CANTX的状态为隐性(高)
-
不会更改任何配置寄存器
-
为初始化与 CAN 筛选器组相关的寄存器( 模式、尺度、 FIFO 分配、激活和筛选器值),软件必须将 FINIT 位 (CAN_FMR) 置 1。
-
筛选器的初始化也可以在初始化模式之外进行。
2.2 正常模式
正常模式的要点如下:
1)NAK = 0 和 SLAK = 0,则 bxCAN 将处于正常模式
2)进入正常模式之前, bxCAN 必须始终在 CAN 总线上实现同步。为了进行同步, bxCAN 将等待 CAN 总线空闲(即,已监测到CANRX 上的 11 个隐性位)。
3)初始化完成,软件必须向硬件请求进入正常模式,这样才能在 CAN 总线上进行同步,并开始接收和发送。
4)正常模式的请求可通过将 CAN_MCR 寄存器的 INRQ 位清零来发出。
5) bxCAN 进入正常模式,并与 CAN 总线上的数据传输实现同步后,即可参与总线活动。
6)要实现数据传输同步,需要等待出现一个由 11 个连续隐性位(总线空闲状态)组成的序列。硬件通过将 CAN_MSR 寄存器的 INAK 位清零,来确认切换到正常模式。
7)筛选器值的初始化与初始化模式无关,但必须要在筛选器处于未激活状态(相应 FACTx 位清零)时进行。筛选器尺度和模式配置必须在进入正常模式之前完成。
2.3 睡眠模式
睡眠模式的要点如下:
1) bxCAN 进入睡眠模式以降低功耗,同时 CANTX 上的内部上拉电阻激活。
2) 软件将 CAN_MCR 寄存器的 INRQ 或SLEEP 位置 1,以请求 bxCAN 进入初始化或睡眠模式。
3)一旦进入该模式, bxCAN 即将CAN_MSR 寄存器的 INAK 或 SLAK 位置 1,以确认该模式,同时禁止内部上拉电阻。
4)配置睡眠模式方法
软件通过将 CAN_MCR 寄存器的 SLEEP 位置 1 而发出请求后,即可进入该模式。
5)配置睡眠模式的特点
-
bxCAN 时钟停止,但软件仍可访问 bxCAN 邮箱。
-
在 bxCAN 处于睡眠模式时,如果软件通过将 INRQ 位置 1 来请求进入初始化模式,则必须同时将 SLEEP 位清零。
3 认识bxCAN测试模式
配置测试模式方法:
1)CAN_BTR 寄存器中的 SILM 和 LBKM 位来选择测试模式,此时 bxCAN必须处于初始化模式
2)注意点:选择测试模式后,必须复位 CAN_MCR 寄存器中的 INRQ 位才能进入正常模式。
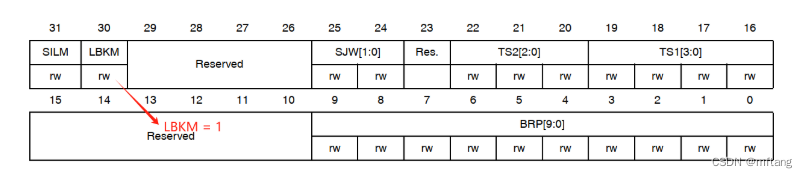
CAN 位时序寄存器 (CAN_BTR)
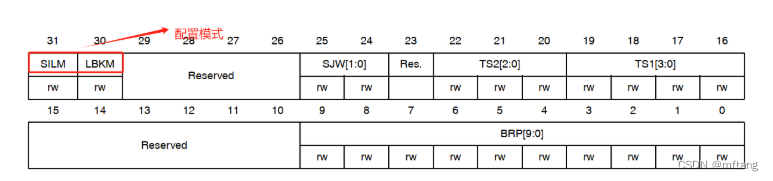
位 31 SILM: 静默模式(调试) (Silent mode (debug)) 0:正常工作 1:静默模式
位 30 LBKM: 环回模式(调试) (Loop back mode (debug)) 0:禁止环回模式 1:使能环回模式
CAN 主控制寄存器 (CAN_MCR)
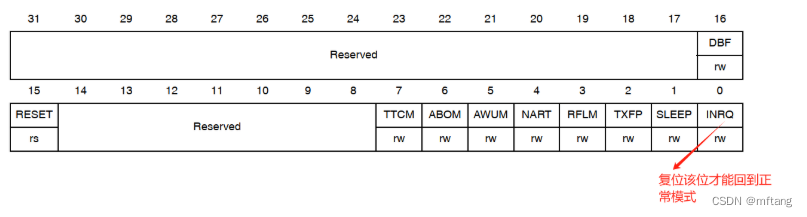
位 0 INRQ: 初始化请求 (Initialization request)
软件通过将此位清零,来将硬件切换到正常模式。一旦在 Rx 信号上监测到连续 11 个隐性位, CAN 硬件即完成同步并准备进行发送和接收。硬件通过将 CAN_MSR 寄存器的 INAK位清零来指示此事件。软件通过将此位置 1 来请求 CAN 硬件进入初始化模式。一旦软件将 INRQ 位置 1, CAN 硬件将等待当前 CAN 活动(发送或接收)结束,然后进入初始化模式。硬件通过将 CAN_MSR寄存器的 INAK 位置 1 来指示此事件。
3.1 静默模式
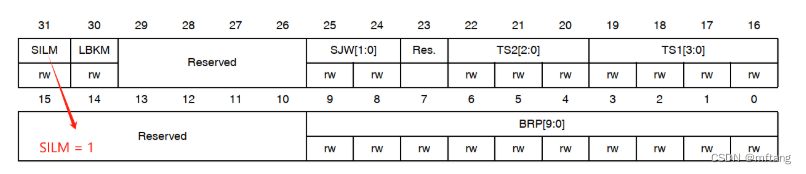
3.1.1 配置静默模式方法
CAN 位时序寄存器 (CAN_BTR)
3.1.2 静默模式特点
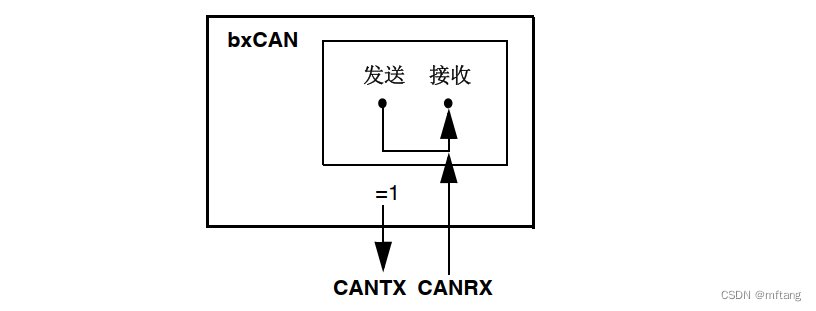
1)bxCAN 可以接收有效数据帧和有效遥控帧,但仅在 CAN 总线上发送隐性位,并且无法启动发送。
2)如果 bxCAN 必须发送一个显性位( ACK 位、溢出标志、活动错误标志),该位将在内部被改道发送,以便 CAN 内核可以监视该显性位,但 CAN 总线可以保持隐性状态。
3)静默模式可用于分析 CAN 总线上的流量,同时又不会因发送显性位(确认位、错误帧)对其造成影响
3. 2 环回模式
3.2.1 配置环回模式方法
可以通过将 CAN_BTR 寄存器的 LBKM 位置 1,将 bxCAN 置于环回模式。
CAN 位时序寄存器 (CAN_BTR)
3.2.2 环回模式特点
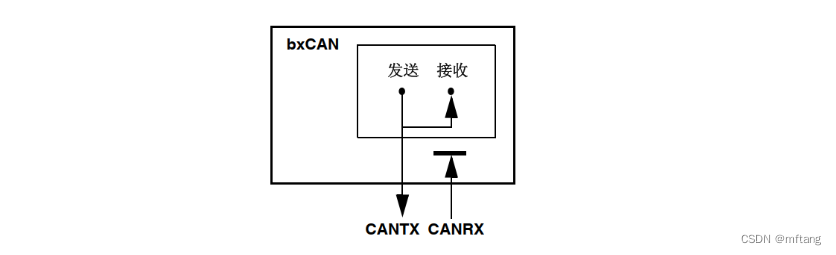
1)在环回模式下,bxCAN 将其自身发送的消息作为接收的消息来处理并存储(如果这些消息通过了验收筛选)在接收邮箱中。
2)该模式为自检功能提供。为了不受外部事件的影响, CAN 内核在环回模式下将忽略确认错误(在数据/远程帧的确认时隙不对显性位采样)。
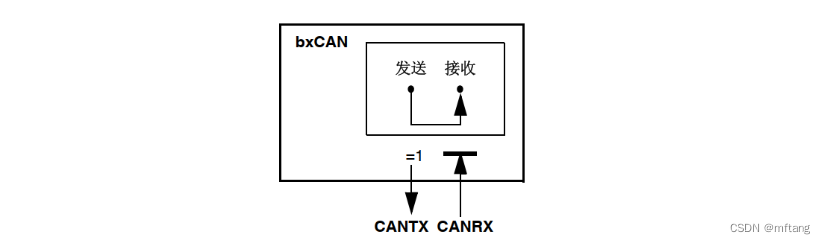
3)在此模式下, bxCAN 将执行从发送输出到接收输入的内部反馈。 bxCAN 将忽略 CANRX 输入引脚的实际值。从 CANTX 引脚可以监视发送的消息
3.3 环回与静默组合模式
3.3.1 配置环回与静默组合模式
可以通过将 CAN_BTR 寄存器的 LBKM 和 SILM 位置 1,将环回模式和静默模式组合起来。
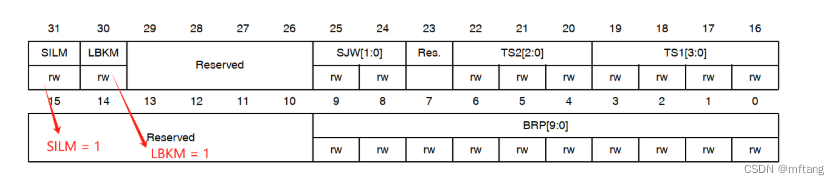
3.3.2 环回与静默组合模式特点
该模式可用于“热自检”,也就是说, bxCAN 可以像在环回模式下一样进行检测,同时又不会影响与 CANTX 和 CANRX 引脚相连接的运行中的 CAN 系统。在此模式下, CANRX 引脚与 bxCAN 断开连接, CANTX 引脚则保持隐性。