专栏介绍:YOLOv9改进系列 | 包含深度学习最新创新,主力高效涨点!!!
一、DySample论文摘要
尽管最近的基于内核的动态上采样器如CARAFE、FADE和SAPA取得了令人印象深刻的性能提升,但它们引入了大量的工作量,主要是由于时间消耗大的动态卷积和用于生成动态内核的额外子网络。 此外,FADE和SAPA对高分辨率特征的需求在一定程度上限制了它们的应用场景。为了解决这些问题,研究人员绕过了动态卷积,并从点采样的角度来表述上采样,这更加节省资源并可以用PyTorch中的标准内置函数轻松实现。与之前的基于内核的动态上采样相比,DySample不需要自定义的CUDA包,并且参数、FLOPs、GPU内存和延迟都要少得多。除了轻量级的特点之外,DySample在五个密集预测任务(语义分割、目标检测、实例分割、全景分割和单目深度估计)中都优于其他上采样器。DySample的应用领域也更广泛,可以适用于各类图像处理任务,有效提升图像处理的效率和质量。
适用检测目标: 通用上采样算子
二、DySample模块详解
论文地址: https://arxiv.org/abs/2308.15085
2.1 模块简介
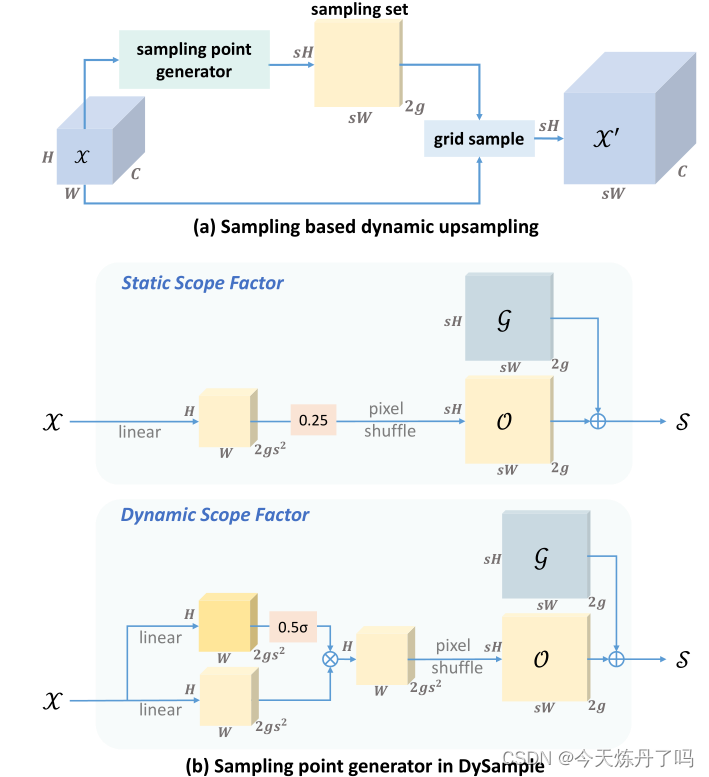
DySample的主要思想: 点采样
总结:一种新的超轻量化上采样算子,发表于ICCV2023
DySample模块的原理图
三、DySample模块使用教程
3.1 DySample模块的代码
try:from mmcv.cnn import build_activation_layer, build_norm_layerfrom mmcv.ops.modulated_deform_conv import ModulatedDeformConv2dfrom mmengine.model import constant_init, normal_init
except ImportError as e:passclass DySample(nn.Module):def __init__(self, in_channels, scale=2, style='lp', groups=4, dyscope=False):super().__init__()self.scale = scaleself.style = styleself.groups = groupsassert style in ['lp', 'pl']if style == 'pl':assert in_channels >= scale ** 2 and in_channels % scale ** 2 == 0assert in_channels >= groups and in_channels % groups == 0if style == 'pl':in_channels = in_channels // scale ** 2out_channels = 2 * groupselse:out_channels = 2 * groups * scale ** 2self.offset = nn.Conv2d(in_channels, out_channels, 1)# normal_init(self.offset, std=0.001)if dyscope:self.scope = nn.Conv2d(in_channels, out_channels, 1)constant_init(self.scope, val=0.)self.register_buffer('init_pos', self._init_pos())def _init_pos(self):h = torch.arange((-self.scale + 1) / 2, (self.scale - 1) / 2 + 1) / self.scalereturn torch.stack(torch.meshgrid(h, h, indexing='ij')).transpose(1, 2).repeat(1, self.groups, 1).reshape(1, -1, 1, 1)def sample(self, x, offset):B, _, H, W = offset.shapeoffset = offset.view(B, 2, -1, H, W)coords_h = torch.arange(H) + 0.5coords_w = torch.arange(W) + 0.5coords = torch.stack(torch.meshgrid(coords_w, coords_h, indexing='ij')).transpose(1, 2).unsqueeze(1).unsqueeze(0).type(x.dtype).to(x.device)normalizer = torch.tensor([W, H], dtype=x.dtype, device=x.device).view(1, 2, 1, 1, 1)coords = 2 * (coords + offset) / normalizer - 1coords = F.pixel_shuffle(coords.view(B, -1, H, W), self.scale).view(B, 2, -1, self.scale * H, self.scale * W).permute(0, 2, 3, 4, 1).contiguous().flatten(0, 1)return F.grid_sample(x.reshape(B * self.groups, -1, H, W), coords, mode='bilinear',align_corners=False, padding_mode="border").view(B, -1, self.scale * H, self.scale * W)def forward_lp(self, x):if hasattr(self, 'scope'):offset = self.offset(x) * self.scope(x).sigmoid() * 0.5 + self.init_poselse:offset = self.offset(x) * 0.25 + self.init_posreturn self.sample(x, offset)def forward_pl(self, x):x_ = F.pixel_shuffle(x, self.scale)if hasattr(self, 'scope'):offset = F.pixel_unshuffle(self.offset(x_) * self.scope(x_).sigmoid(), self.scale) * 0.5 + self.init_poselse:offset = F.pixel_unshuffle(self.offset(x_), self.scale) * 0.25 + self.init_posreturn self.sample(x, offset)def forward(self, x):if self.style == 'pl':return self.forward_pl(x)return self.forward_lp(x)3.2 在YOlO v9中的添加教程
阅读YOLOv9添加模块教程或使用下文操作
1. 将YOLOv9工程中models下common.py文件中增加以下代码。
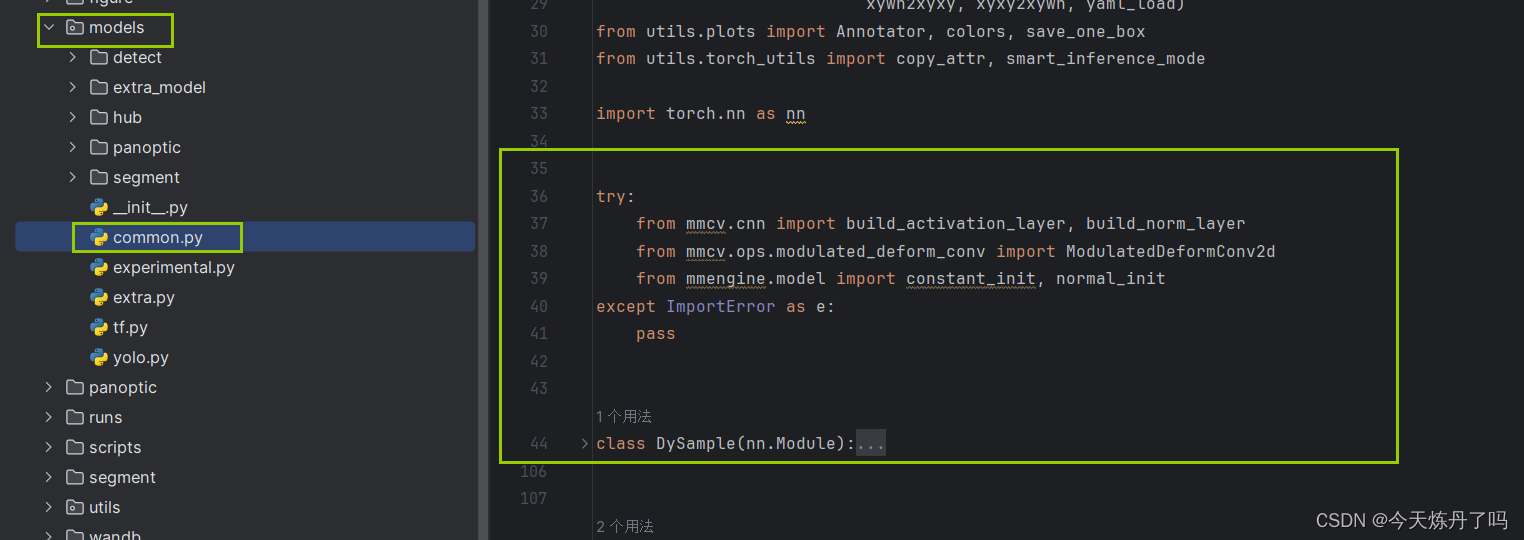
try:from mmcv.cnn import build_activation_layer, build_norm_layerfrom mmcv.ops.modulated_deform_conv import ModulatedDeformConv2dfrom mmengine.model import constant_init, normal_init
except ImportError as e:passclass DySample(nn.Module):def __init__(self, in_channels, scale=2, style='lp', groups=4, dyscope=False):super().__init__()self.scale = scaleself.style = styleself.groups = groupsassert style in ['lp', 'pl']if style == 'pl':assert in_channels >= scale ** 2 and in_channels % scale ** 2 == 0assert in_channels >= groups and in_channels % groups == 0if style == 'pl':in_channels = in_channels // scale ** 2out_channels = 2 * groupselse:out_channels = 2 * groups * scale ** 2self.offset = nn.Conv2d(in_channels, out_channels, 1)# normal_init(self.offset, std=0.001)if dyscope:self.scope = nn.Conv2d(in_channels, out_channels, 1)constant_init(self.scope, val=0.)self.register_buffer('init_pos', self._init_pos())def _init_pos(self):h = torch.arange((-self.scale + 1) / 2, (self.scale - 1) / 2 + 1) / self.scalereturn torch.stack(torch.meshgrid(h, h, indexing='ij')).transpose(1, 2).repeat(1, self.groups, 1).reshape(1, -1, 1, 1)def sample(self, x, offset):B, _, H, W = offset.shapeoffset = offset.view(B, 2, -1, H, W)coords_h = torch.arange(H) + 0.5coords_w = torch.arange(W) + 0.5coords = torch.stack(torch.meshgrid(coords_w, coords_h, indexing='ij')).transpose(1, 2).unsqueeze(1).unsqueeze(0).type(x.dtype).to(x.device)normalizer = torch.tensor([W, H], dtype=x.dtype, device=x.device).view(1, 2, 1, 1, 1)coords = 2 * (coords + offset) / normalizer - 1coords = F.pixel_shuffle(coords.view(B, -1, H, W), self.scale).view(B, 2, -1, self.scale * H, self.scale * W).permute(0, 2, 3, 4, 1).contiguous().flatten(0, 1)return F.grid_sample(x.reshape(B * self.groups, -1, H, W), coords, mode='bilinear',align_corners=False, padding_mode="border").view(B, -1, self.scale * H, self.scale * W)def forward_lp(self, x):if hasattr(self, 'scope'):offset = self.offset(x) * self.scope(x).sigmoid() * 0.5 + self.init_poselse:offset = self.offset(x) * 0.25 + self.init_posreturn self.sample(x, offset)def forward_pl(self, x):x_ = F.pixel_shuffle(x, self.scale)if hasattr(self, 'scope'):offset = F.pixel_unshuffle(self.offset(x_) * self.scope(x_).sigmoid(), self.scale) * 0.5 + self.init_poselse:offset = F.pixel_unshuffle(self.offset(x_), self.scale) * 0.25 + self.init_posreturn self.sample(x, offset)def forward(self, x):if self.style == 'pl':return self.forward_pl(x)return self.forward_lp(x)
2. 将YOLOv9工程中models下yolo.py文件中的第718行(可能因版本变化而变化)增加以下代码。

elif m in (DySample,):args.insert(0, ch[f])3.3 运行配置文件
# YOLOv9
# Powered bu https://blog.csdn.net/StopAndGoyyy
# parameters
nc: 80 # number of classes
#depth_multiple: 0.33 # model depth multiple
depth_multiple: 1 # model depth multiple
#width_multiple: 0.25 # layer channel multiple
width_multiple: 1 # layer channel multiple
#activation: nn.LeakyReLU(0.1)
#activation: nn.ReLU()# anchors
anchors: 3# YOLOv9 backbone
backbone:[[-1, 1, Silence, []], # conv down[-1, 1, Conv, [64, 3, 2]], # 1-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 2-P2/4# elan-1 block[-1, 1, RepNCSPELAN4, [256, 128, 64, 1]], # 3# avg-conv down[-1, 1, ADown, [256]], # 4-P3/8# elan-2 block[-1, 1, RepNCSPELAN4, [512, 256, 128, 1]], # 5# avg-conv down[-1, 1, ADown, [512]], # 6-P4/16# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 7# avg-conv down[-1, 1, ADown, [512]], # 8-P5/32# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 9]# YOLOv9 head
head:[# elan-spp block[-1, 1, SPPELAN, [512, 256]], # 10# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 7], 1, Concat, [1]], # cat backbone P4# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 13# up-concat merge[-1, 1, DySample, []],[[-1, 5], 1, Concat, [1]], # cat backbone P3# elan-2 block[-1, 1, RepNCSPELAN4, [256, 256, 128, 1]], # 16 (P3/8-small)# avg-conv-down merge[-1, 1, ADown, [256]],[[-1, 13], 1, Concat, [1]], # cat head P4# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 19 (P4/16-medium)# avg-conv-down merge[-1, 1, ADown, [512]],[[-1, 10], 1, Concat, [1]], # cat head P5# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 22 (P5/32-large)# multi-level reversible auxiliary branch# routing[5, 1, CBLinear, [[256]]], # 23[7, 1, CBLinear, [[256, 512]]], # 24[9, 1, CBLinear, [[256, 512, 512]]], # 25# conv down[0, 1, Conv, [64, 3, 2]], # 26-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 27-P2/4# elan-1 block[-1, 1, RepNCSPELAN4, [256, 128, 64, 1]], # 28# avg-conv down fuse[-1, 1, ADown, [256]], # 29-P3/8[[23, 24, 25, -1], 1, CBFuse, [[0, 0, 0]]], # 30 # elan-2 block[-1, 1, RepNCSPELAN4, [512, 256, 128, 1]], # 31# avg-conv down fuse[-1, 1, ADown, [512]], # 32-P4/16[[24, 25, -1], 1, CBFuse, [[1, 1]]], # 33 # elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 34# avg-conv down fuse[-1, 1, ADown, [512]], # 35-P5/32[[25, -1], 1, CBFuse, [[2]]], # 36# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 37# detection head# detect[[31, 34, 37, 16, 19, 22], 1, DualDDetect, [nc]], # DualDDetect(A3, A4, A5, P3, P4, P5)]
3.4 训练过程

欢迎关注